模拟自然风风机控制系统设计
2016-08-02杨义强宋仲康汤馥源
杨义强,付 晶,宋仲康,汤馥源,陈 怡
(1.武汉理工大学 自动化学院,湖北 武汉 430070;2.中国电力科学研究院,湖北 武汉 430070)
模拟自然风风机控制系统设计
杨义强1,付晶2,宋仲康1,汤馥源1,陈怡2
(1.武汉理工大学 自动化学院,湖北 武汉 430070;2.中国电力科学研究院,湖北 武汉 430070)
摘要:为了检验旋翼无人机巡检系统抗风能力,搭建抗风试验场模拟自然风。重点阐述了敞开式风场环境中风机与风管控制机构参数计算过程、模拟自然风方法及风速控制算法。仿真验证了风速控制算法的合理性,并简述了嵌入式控制器作为试验场控制装置的优点及其设计方法。通过该设计实现了检验旋翼无人机巡检系统抗风能力高低的目的。
关键词:风机系统;模拟自然风;风速控制算法;控制机构
近几年来,随着特高压输电线路的建设及巡检技术手段的发展,电力检修中输电线路旋翼无人机巡检系统因携带方便、工作高效得到越来越广泛应用。在实际应用中,旋翼无人机巡检系统因抗风能力不足而出现事故多发的问题。先前的旋翼无人机抗风能力检测多在外界空旷环境中依赖自然风进行,外界风稳定性差,检测过程耗费大量人力、物力,检测规则不统一,且难于量化。因此,需搭建输电线路旋翼无人机巡检系统敞开式抗风试验场。选择敞开式抗风试验场,是为了在试验过程中预留足够的空间范围来全面体现被测旋翼无人机的抗风性能,并保证飞行安全;为使其实验环境与密闭式的、空间较狭小的风洞环境相区别,选择在露天环境中建立敞开式抗风试验场。
目前已有多种风机在工业生产过程中得到广泛应用,如轴流风机、射流风机、离心风机[1]等,但没有能够直接应用于该抗风试验场的成熟设备,且没有一种风管及其控制机构能够模拟出单向风、侧风及旋风等自然风。笔者根据实际需求,利用流体力学相关规律,计算相关参数,搭建风机、风管及其附属控制机构。针对风机系统存在的滞后性[2],以及模拟不同自然风时的性能指标要求,建立被控风场系统模型;针对滞后系统控制的预估补偿控制、模糊自整定[3-4]等算法的特点,在模拟不同种类自然风时,为了达到最佳模拟效果,采用不同的风速控制算法,并通过Matlab仿真验证该算法设计的合理性。
1搭建风机、风管及附属控制系统
1.1风机系统参数计算
首先简述最终要达到的效果:在外界空旷平坦的正方形地面,将风机四角对称放置,风管将风机出风口的高度提高10 m左右,此高度可在一定范围内调节,用以给旋翼无人机一个安全的飞行高度;为了达到满足测试条件的风场环境,出风口要能完成3种不同方式动作:垂直方向的上下移动、垂直方向的俯仰动作、水平方向的左右摇摆动作。通过协调配合,实现模拟单向自然风、侧风扰动、旋转风等不同种类的自然风;风速测试中心区即所谓被测点,是方形区对角线的交点,也是圆形的中心测试区域的圆点;测试区中心要达到的最高风速不小于15 m/s。
风机参数计算与选型影响到后续控制器的搭建和控制算法设计。风机启动,叶片转动,气流从风机出口到达风管出风口,这一过程表明系统具有滞后性[5]。风速测量点达到指定的风速,风机启动一段时间后,整体的风场已经形成,趋于稳定。因此整个过程,可以用一个带纯滞后部分的一阶惯性环节模型等效[6-7]。风机选型按照图1所示思路进行。

图1 风机参数计算与选型流程图
经过对工业自动化领域的风机系统进行调查后,在工业生产中得到广泛应用的4-72系列离心风机中的特定型号能够满足试验要求,在此系列风机基础上发展而来的柜式风机,除了具有4-72系列的功能外,还兼有防沙尘、防雨水侵蚀、噪音相对较小的优点,非常适合敞开式试验环境的要求。笔者预选目标定为柜式风机,并结合该型风机具体参数展开计算。
(1)根据被测点风速最高要求值计算风管出风口的风速值。根据设计要求,计算时取中心点最高风速为20 m/s,该值超出预定目标风速33%,裕量充足。依据流体力学中自由射流的公式来计算风管出风口处的风速值:
(1)
式中:vx为被测点的风速值;v0为风管出口风速值;a为紊流系数(取值范围为0.07~0.08);x为风管出风口处到被测点的直线距离;d0为风管直径。
按管道直径d0=0.6 m计算,已知vx=20 m/s,a=0.075(经验值),x=5 m,被测区域对角线长度的一半是7 m,2 m左右的长度留给风机、风管控制系统的占地直线距离所用,经计算得到v0=32.1 m/s。
(2)单风口气流扩散角度计算。经查阅流体力学相关资料,有两个经验算式可供借鉴。经验算法一:根据a值计算扩散角度及气流至中心点位置时气流的扩散面积。将a值代入tan θ=3.4a,计算出2×θ=28°,被测点处吹风半径为1.25 m。经验算法二:令θ取17°,则2×θ=34°,被测点处吹风半径为1.53 m。两种算法算得的结果表明,此吹风面积满足笔者设计要求。
(3)由出风口风速、出风口面积推算风量。风机风量为管道截面积与平均风速的乘积,即Q=32.1×3.14×0.3×0.3 m3/s=9.07 m3/s=32 657 m3/h。当风速值取35 m/s时,风机风量Q=35×3.14×0.3×0.3 m3/s=9.89 m3/s=35 607 m3/h。确定风量范围为33 000~40 000 m3/h。
(4)计算风管内的压力损失,即静压损失。按图2所示结构来计算:风管长10 m,然后根据风速及管道直径可以查通风手册计算得到过滤器摩擦阻力为150 Pa,管道摩擦阻力损失为200 Pa。接下来计算局部阻力损失,系统中有一个90°弯头及风机出口圆变方的变径结构,弯头的阻力损失为0.5×0.16×v2(流速v按照30 m/s计算),0.16为90°弯头局部阻力损失系数,弯头局部损失为72 Pa;方形变圆形变径处局部阻力损失系数为0.08,阻力损失为36 Pa。因此静压损失为150+200+72+36=458 Pa。
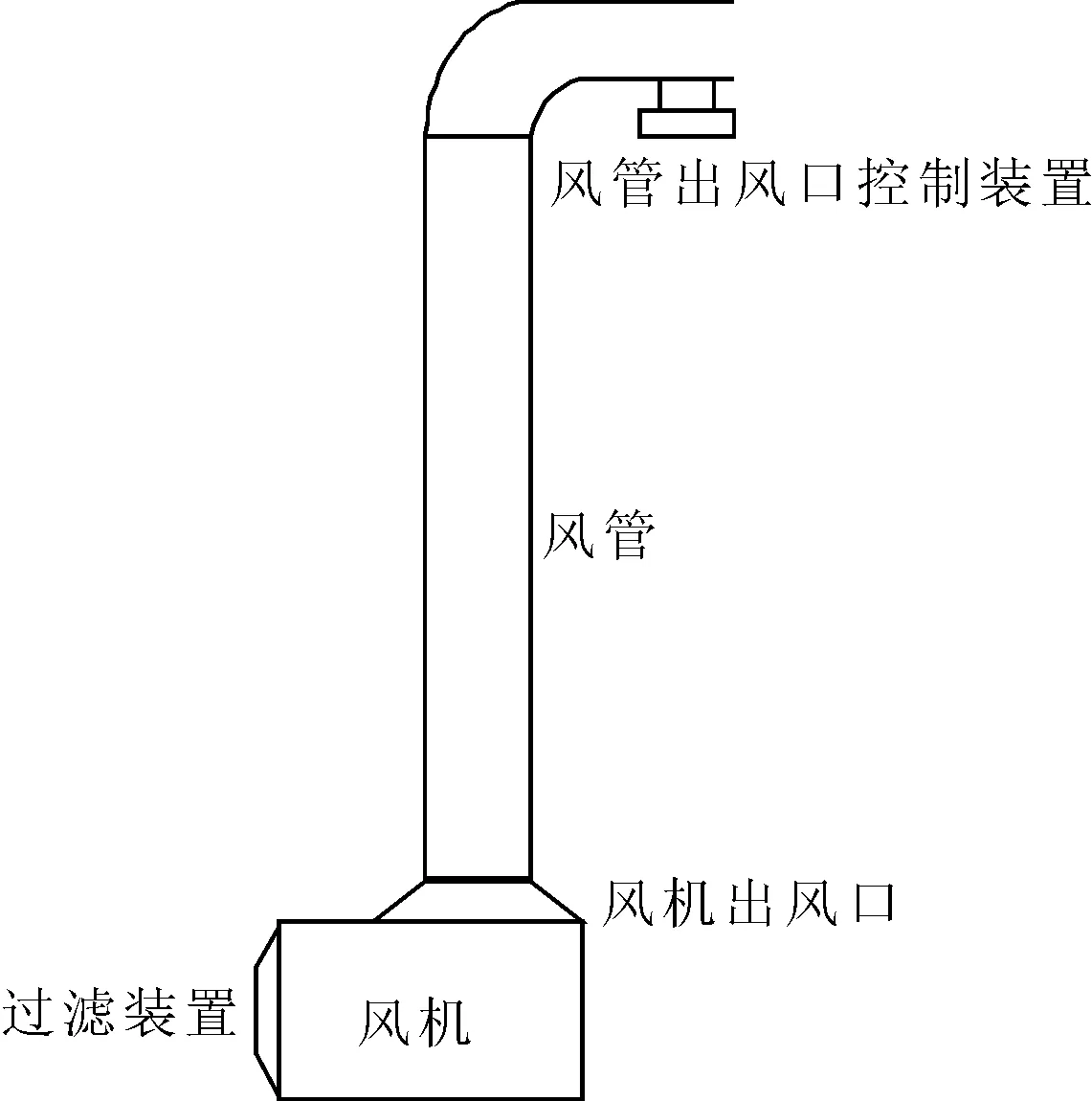
图2 风机、风管系统布置简图
(5)计算风机出风口的动压。这个动压值与风机出风口处的面积有关,根据产品使用手册查得风机出风口规格:长×宽=908 mm×905 mm。风量取36 000 m3/h,风机出风口处速度为v0。出风口面积=长×宽=0.908×0.905 m2=0.821 7 m2。v0=10/0.821 7=12.2 m/s,动压=0.5×1.29×12.2×12.2 Pa=96 Pa。
(6)计算风机出风口的全压。风机出风口的全压,一部分消耗给风管静压损失,另一部分给了风管出风口动压,故全压=静压+动压=458 Pa+96 Pa=554 Pa。考虑到裕量,则全压=554 Pa×1.2=665 Pa。
在风机选型时,风机需满足两个条件:①风量不小于36 000 m3/h;②风压不小于665 Pa。需要注意的是,此风压值应与出风口面积相联系,这是按风机出风口面积为0.821 7 m2时的计算值。然后根据这两个条件,结合该型风机参数表与风机性能参数曲线,选择出该系列中满足条件的具体型号即可。
1.2风机选型结果仿真验证
通过CFD模拟可以看出,在出风口平均速度为32 m/s时,在被测点处平均风速为20 m/s,由于边界条件设定的不同,扩散角度不同,所以其与理论计算值略有不同。分析仿真图数据可知,在上述风机选型与风管的情况下,被测点的风速值与吹风面积都能够满足指标要求。图3中的白色竖线是离风管出风口垂直距离7 m处,即中心测试点处。图4的截面即中心测试点平行于风管出风口的截面。
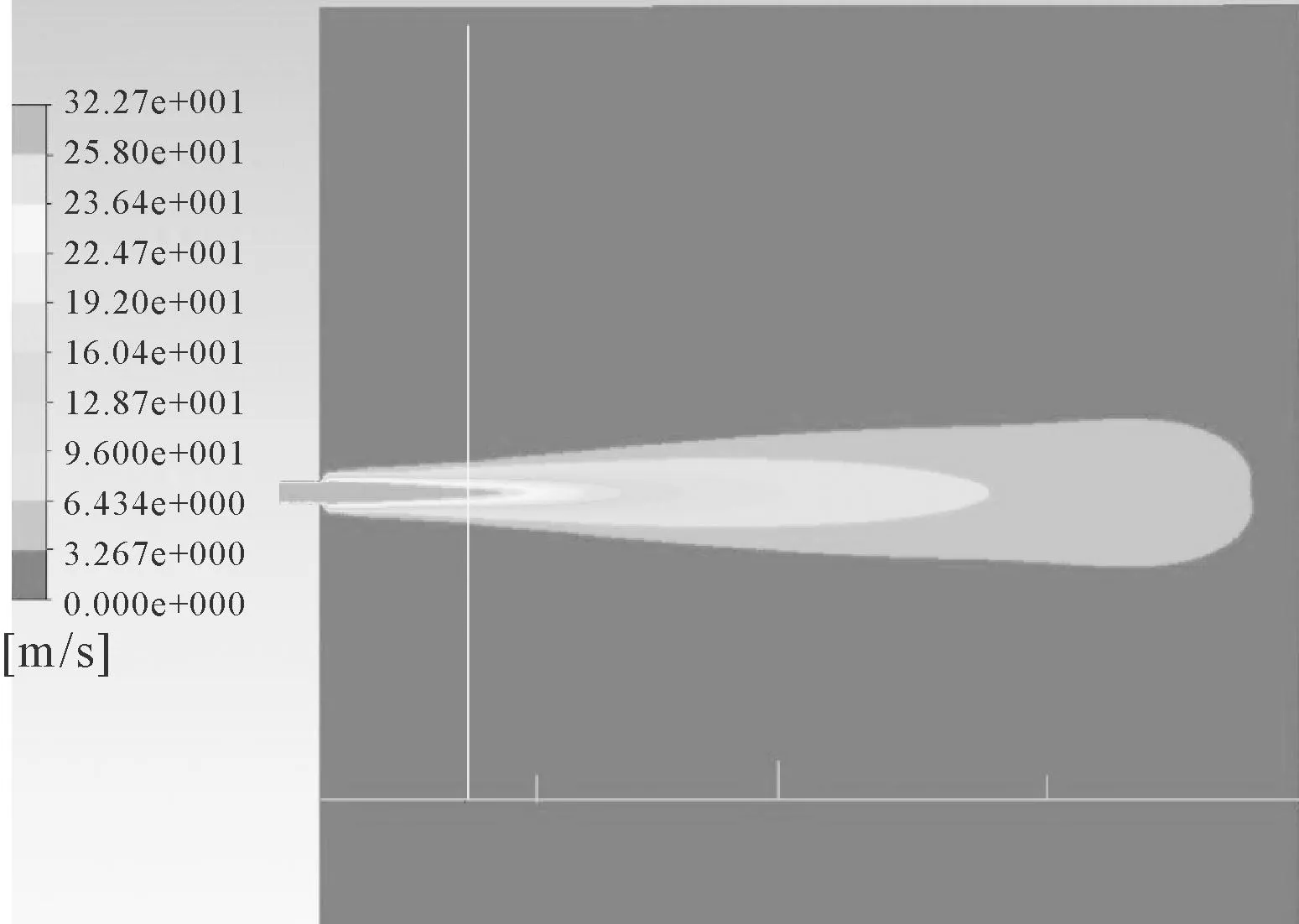
图3 横向风速分布云图
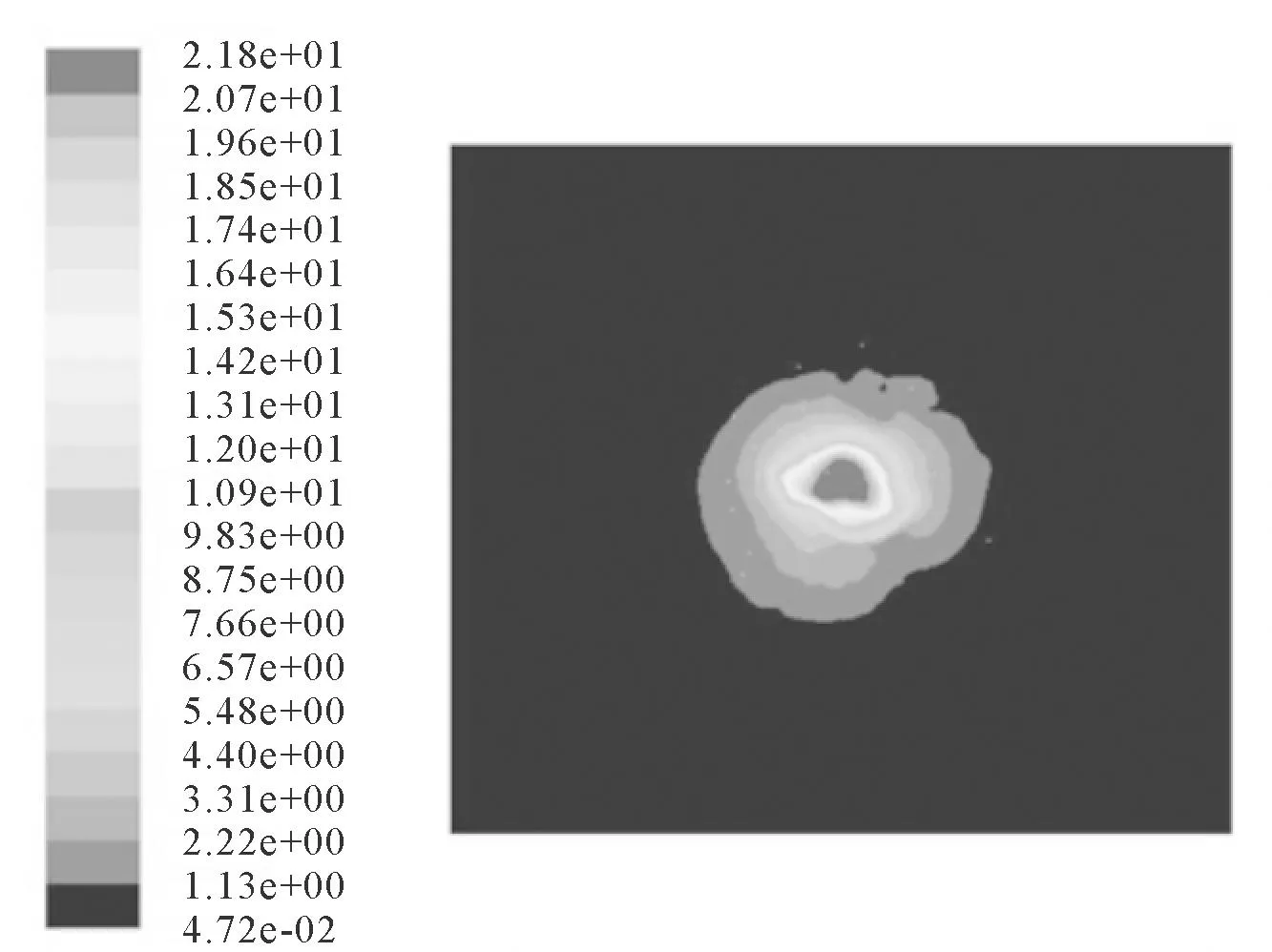
图4 径向风速分布云图
2模拟自然风的实现
在风机系统设备搭建的硬件平台上,利用流体力学相关定律,参考类似滞后系统建模中的简化与近似,得到被控对象的传递函数:
(2)
为了更全面地检验旋翼无人机巡检系统的抗风能力,该敞开式风场环境要完成如下3个基本功能。
(1)模拟单向自然风。风向单一,风速的上升时间可调,假设试验中风速由0增加到指定风速值v的时间依次选择为t1,t2,t3,则t1 (2)模拟侧风扰动。在民航客机的降落过程中,若机场出现较强侧风,如果驾驶员经验不够丰富,则可能出现因飞机滑出跑道而引发事故。为了考核被测巡检系统是否具有抗侧风能力,敞开式的风场环境应具有模拟侧风的功能。例如当一台风机A在模拟单向自然风达到稳定时,与A邻近的任一风机B吹来另一个方向的风。这个过程对控制系统的要求是:①A风机性能要求与模拟单向风时要求相同;②B风机要实现响应速度快,且风速平稳,即稳态误差小,只有这样才能模拟出侧风的效果。 (3)模拟旋转风向。在山地丘陵或河湖交错等地形较为复杂的地区,容易形成旋转风,即无固定风向的风场环境。这个模拟过程,要求4台风机之间的衔接过程要紧密,两种风交替时不出现无风时间。即被检测的旋翼无人机巡检系统处于风速变化但不间断、风向随机变化的风场环境中。 根据以上控制要求,不难发现,对风机主要有两种不同的控制要求:①风速的上升时间可调,即系统响应的调节时间t可以通过控制参数调节,响应过程无超调;②响应速度快,稳态误差小,无超调,不要求上升时间可调。 为了达到第一种控制要求,选择Simth预估控制算法。因为普通PID算法对滞后系统的控制效果不理想,调节时间长,超调较大[8],且调节过程震荡次数较多,参数整定困难。为了避免因控制过于频繁引起的振荡,Gc(s)采用带死区的PID控制算法,应用Matlab R2013b/Simulink工具箱搭建的仿真系统结构图如图5所示。 图5 Simth预估控制结构图 图6 3种风速上升速率(预估控制) 通过调节控制器参数,即可得到不同响应时间的控制效果图,如图6所示。风速上升时间分为10 s、20 s、40 s的3种单向自然风。 从仿真效果看,Smith控制算法能够满足控制要求。经过不断积累参数调节经验,Smith控制算法满足模拟单向自然风的要求。采用Smith控制算法的前提是需要知道被控系统的数学模型,预估模型才能够准确;而模糊控制可摆脱对被控对象模型的依赖[9],为完成第二种控制目标提供了借鉴。模糊控制虽可以减少系统的振荡,但出现了稳态误差,且稳态误差较大;模糊PID控制克服了纯PID控制和模糊控制的缺点,实现了系统调节时间短、超调量小、稳态误差小的理想性能指标。因此选用参数自整定模糊PID控制作为完成第二种控制要求的方案。在Simulink仿真环境中搭建仿真,如图7所示。 图7 参数自整定模糊 PID 控制仿真图 经过参数调节,得到符合要求的仿真结果,如图8所示。模糊自适应PID控制的优势不仅体现在调节时间上,还体现在其不依赖模型的特性。模糊PID控制算法在被控制过程中存在潜在的扰动、动态特性变化或其他不确定因素时,依然能达到较好的控制效果,并且具有响应速度快,超调量小等优点,因此选择使用模糊自适应PID控制算法控制风机系统模拟自然界的旋转风。将处于东南西北方向的4套风机系统依次顺时针编号为A、B、C、D,在0 s、15 s、30 s、45 s时依次对A、B、C、D 4套风机系统施加方波控制信号,峰值分别为10 m/s、13 m/s、10 m/s、13 m/s,峰值持续时间均为25 s的方波控制信号,系统响应如图9所示。 图8 模糊 PID 得到的仿真结果 图9 模拟旋转风 由图9可知,在10~25 s的时间段里,测试区的风为10 m/s的东风,接下来以15 s为时间段,测试区的风依次变化为13 m/s的南风、10 m/s的西风、13 m/s的北风。这就形成了一个风速、风向旋转变化的旋转风场。经过操作经验积累,便能得到风向变化连续、自然的旋转风。 综上,在模拟单向风时,选择控制参数调节相对方便的Smith控制算法。在模拟侧风、旋风时,采用对被控系统模型依赖小、控制精度高的模糊PID算法。 3控制器设计 工控过程中广泛应用可编程逻辑控制器、触摸屏或者工控机组成的系统作为控制设备。作为此抗风试验场的控制器,还应满足一些特殊要求,比如在测试过程中,应能从不同角度观察被测旋翼无人机的飞行姿态。为了保证飞行安全和全面体现出被测设备的抗风能力,控制器应能根据被测无人机的被测状态,下达相应指令,因此控制器应具有小巧方便、可移动的特点。嵌入式控制器可实现此功能[10]。 风管出风口动作通过以下设计实现控制:将风管出风口部分放置于控制台上,通过卷扬机牵引此平台上下移动;平台一侧固定,另一侧通过液压机构升降,实现俯仰动作;平台与齿轮连接,通过步进电机控制齿轮转动的角度实现左右转向。 用基于Cortex-M3架构的Stm32微控制器控制SIEMENS M430变频器,M430与风机系统中变频电机连接来调节风速。Stm32与卷扬机系统、液压控制系统、伺服电机系统连接,分别实现出风口高度调节、俯仰角度调节、左右转动调节。Stm32微控制器通过ILI9341控制器与带触摸屏的TFT-LCD连接,用来显示控制信息。 4结论 (1)根据敞开式抗风试验场对风速、吹风面积等指标要求,根据流体力学规律、风机类型、应用场合和性能指标等参数,经过理论计算和CFD流体仿真,解决了风机类型、功率、风管尺寸等基础问题。设计出使风管能在3个方向转动的机构,并搭建了风场所需的基础硬件平台。 (2)为了更好地模拟3种主要自然风,分析了不同风的特点,并结合硬件实现条件,逐一分析、设计风速实现控制方法,并通过Matlab仿真验证了算法的合理性。为了在试验中更全面地观察被测旋翼无人机系统的飞行状态,选择操作灵活的嵌入式设备作为控制器。 (3)在此系统设计过程中,通过不断积累实际经验,风速、风向控制配合协调后,可模拟自然风。此种控制方法是将风速与风向的控制分开来设计的,并没有一个统一的算法自动协调两种控制命令,这将是以后改进整套系统的研究方向。 参考文献: [1]中国通用机械工业协会风机分会.风机手册[M].北京:机械工业出版社,2011:91-112. [2]余鹏.基于前馈式模糊控制的公路隧道通风系统研究[D].太原:太原理工大学,2010. [3]陈哲盼,焦嵩鸣.大滞后系统的专家:模糊PID控制器设计[J].计算机仿真,2014,31(11):386-389. [4]李晓丹.模糊PID控制器的设计研究[D].天津:天津大学,2005. [5]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008:235-325. [6]WEI V S.A novel design of fuzzy PID controllers for dual-sensor cardiac pacemaker systems[J].Open Journal of Applied Biosensor,2013,2(2):15-35. [7]李尹.PID控制算法及其在风速控制中的应用[D].武汉:华中科技大学,2007. [8]PADHAN D G,MAJHI S.Modified smith predictor based cascade control of unstable time delay processes[J].ISA Transactions,2012,51(1):95-104. [9]HARINATH E,MANN G K I.Design and tuning of standard additive model based fuzzy PID controllers for multivariable process systems[J].IEEE Transactions on Systems Man and Cybernetics,2008,38(3):667-674. [10]刘火良,杨森.STM32库开发实战指南[M].北京:机械工业出版社,2013:72-96. YANG Yiqiang:Postgraduate; School of Automation,WUT,Wuhan 430070,China. [编辑:王志全] 文章编号:2095-3852(2016)01-0131-05 文献标志码:A 收稿日期:2015-08-31. 作者简介:杨义强(1989-),男,山东淄博人,武汉理工大学自动化学院硕士研究生. 中图分类号:TP29 DOI:10.3963/j.issn.2095-3852.2016.01.029 Design of Centrifugal Fan Control System for Natural Wind Simulation YANG Yiqiang,FU Jing,SONG Zhongkang,Tang Fuyuan,Chen Yi Abstract:In order to examine the wind resistance ability of the rotorcraft Uav inspection system,the wind resistance test equipment was designed to simulate the natural wind.This article introduces the centrifugal fan system and the construction of duct and its control device,then the methods to simulate the natural wind and the wind-speed control arithmetics were studied.In the following part,it described the rationality of control arithmetics depend on the simulation results.Finally,the reason to choose the embedded controller and its design were illustrated.All the above combined to the wind resistance test equipment. Key words:centrifugal fan system;simulating natural wind;wind-speed control arithmetic;control device