基于神经网络的触觉感知方向识别研究
2016-08-02吴皓莹
周 嵘,吴皓莹
(武汉理工大学 信息工程学院 ,湖北 武汉 430070)
基于神经网络的触觉感知方向识别研究
周嵘,吴皓莹
(武汉理工大学 信息工程学院 ,湖北 武汉 430070)
摘要:触觉感知信息的模式识别可以有效提高人机交互的效率,为此设计了一种触觉传感单元功能模块,可以在2D平面内识别人机接触的方向信息。采用PCA算法来提取触觉感知数据特征,从而去除数据的噪音并且降低维度;采用BP神经网络对人机接触方式进行识别分类,提高鲁棒性。对于不同实验对象的训练样本和测试样本进行数据采集,结果表明该方法可以实现93.1%的模式识别正确率。
关键词:触觉;PCA算法;BP神经网络;模式识别
为了提高人机交互的效率,需要对各种人机交互模式进行正确的识别和分类[1-2]。对人类而言,触觉信息是探测和学习日常物品属性的基础。触觉阵列传感器拥有感知分布式触觉信息的能力,是人机视、听觉交互的不可或缺的补充,因此该传感器已被广泛地应用于机器人对环境信息的感知以及对人类意图感知方面[3]。目前大多数触觉阵列系统被用来感知外界物体的材质和形状,但是在机器人感知人类抓握方向,进而结合外部环境识别出人类传递意图信息方面研究较少。为此,笔者提出一种有效的方法,用来识别人类与机器人触觉交互二维空间的6种方向。
1数据采集和特征提取
1.1数据采集
实验的硬件架构由触觉阵列传感器、手柄、扫描电路、通信模块,以及一台用来进行数据处理的PC组成。触摸传感器的扫描节点用来检测触觉信息。实验所用阵列传感器的柔韧性非常好,足以环绕在柱状手柄上。这个多点触摸传感器具有一个活跃区,用来测量施加在手柄上的力。实验中的扫描电路用来实时检测每个单元并获取信息[4]。传感阵列的输出送到一个由单片机控制的模拟-数字转换器,并通过蓝牙将信号送到PC。通过这种方法,就可以获得手柄上的压力分布。阵列传感器如图1所示。

图1 触觉阵列传感器
由于触摸传感器表面是卷曲的,导致在一些区域出现虚假活跃状态。为了排除测量前的初始压力,用单片机进行编程来调整偏移。在获取测试数据之前,先测量10次初始电压,取其平均值作为系统的偏移,模拟-数字转换器的输出减去偏移量便为施加在传感器上的压力。这样,数据采集的预处理过程就完成了[5]。
1.2PCA处理
测量过程中最初的空间变量可以认为是具有多维特征的特征值,并且它们通常彼此相关,数据也可以设置成显著的模式。主成分分析(即PCA),也叫Karhunen-Loeve变换,是一种广泛使用的将多维空间变量划分成最小维度子空间的方法[6]。特征向量对应着最高的特征值和所定义的子空间。在这项工作中,采用PCA方法提取触觉样品的基本信息,算法步骤为:
(1)读出10×16训练样本的维度,并将其转换为一个具有160个元素的矢量。

(3)计算样本平均值,并从训练集中的每个样本值减去该平均值。减法操作的结果形成矩阵A。每个图像与平均图像之间的差为φi=xi-ψ,该差矢量形成矩阵A,A={φ1,φ2,…,φM}。
(5)计算输入样本的特征Ωi=LTφi
2BP神经网络的原理
神经网络是一个模仿生物神经系统一些行为的数学模型。其可以存储信息,并且通过节点之间的连接就可以完成分类计算。反向传播(BP)神经网络是一种广泛使用的分类式神经网络,其中神经元布置在各层中,每个神经元只能与下一个层中的神经元连接。每一层的状态受其后面神经细胞的影响。 BP网络使用错误反馈算法和基于梯度下降的方法来纠正网络的权值和阈值。
BP神经网络的整个学习算法包括两个阶段[7]:向前传播和向后传播。在向前传播的过程中,通过输入信息算出输出信息并传播到输出层,如果所需的输出不能从输出层中获得,就应该修改神经元网络的权重和阈值。当误差小于预定值或迭代次数大于预定值时,可以结束训练过程。
研究中采用BP神经网络来对6个不同的方向模式进行分类。在这个网络中有一个4神经元的输入层和一个6神经元的输出层,以及两者之间的一个10神经元的隐藏层。所选网络训练功能根据BFGS准牛顿方法更新权重和偏差,网络性能通过误差平方的平均值来度量。
3所用方法的操作步骤
由于干扰和触觉信息的不确定性,初始信息矩阵被转换为归一化矩阵,PCA方法用来提取必要的信息,从而提高了触觉信息的可靠性,降低了计算成本。引入BP神经网络是一种提高鲁棒性的分类方法。
(1)数据采集和标定。扫描电路驱动传感器,通过硬件设备就可以获得触觉信息。获得的电压代表传感器上的压力分布,因此,初始的数据需要进一步处理。
(2)初始数据预处理。获得归一化关系矩阵并且通过PCA方法提取初始数据的基本信息。所提取特征的维度低于初始数据,因而降低了计算量。
(3)使用BP神经网络进行模式识别。 采用BP神经网络进行分类,当一个预定的触觉模式被识别,该模式的图案就会在屏幕中显示,同时触发另一个序列。
4实验
实验由小组3名成员手握传感器采集数据,采集到的数据被均分为两份,一份用于训练神经网络,另一份用于测试算法准确性、鲁棒性。所有成员均为右手握传感器,实验指定正北、西北、东北、正南、西南、东南6个方向作为实验测试方向,分别让测试者手握传感器向该6个方向推拉,采集每人在每个方向上的100次使用数据,组成数据库用于研究。图2所示为各方向上采集到的典型样本及所提取的特征值,可见采集到的数据在特征空间分布差异性,神经网络训练结果及混淆矩阵,分别如图3及表1所示。
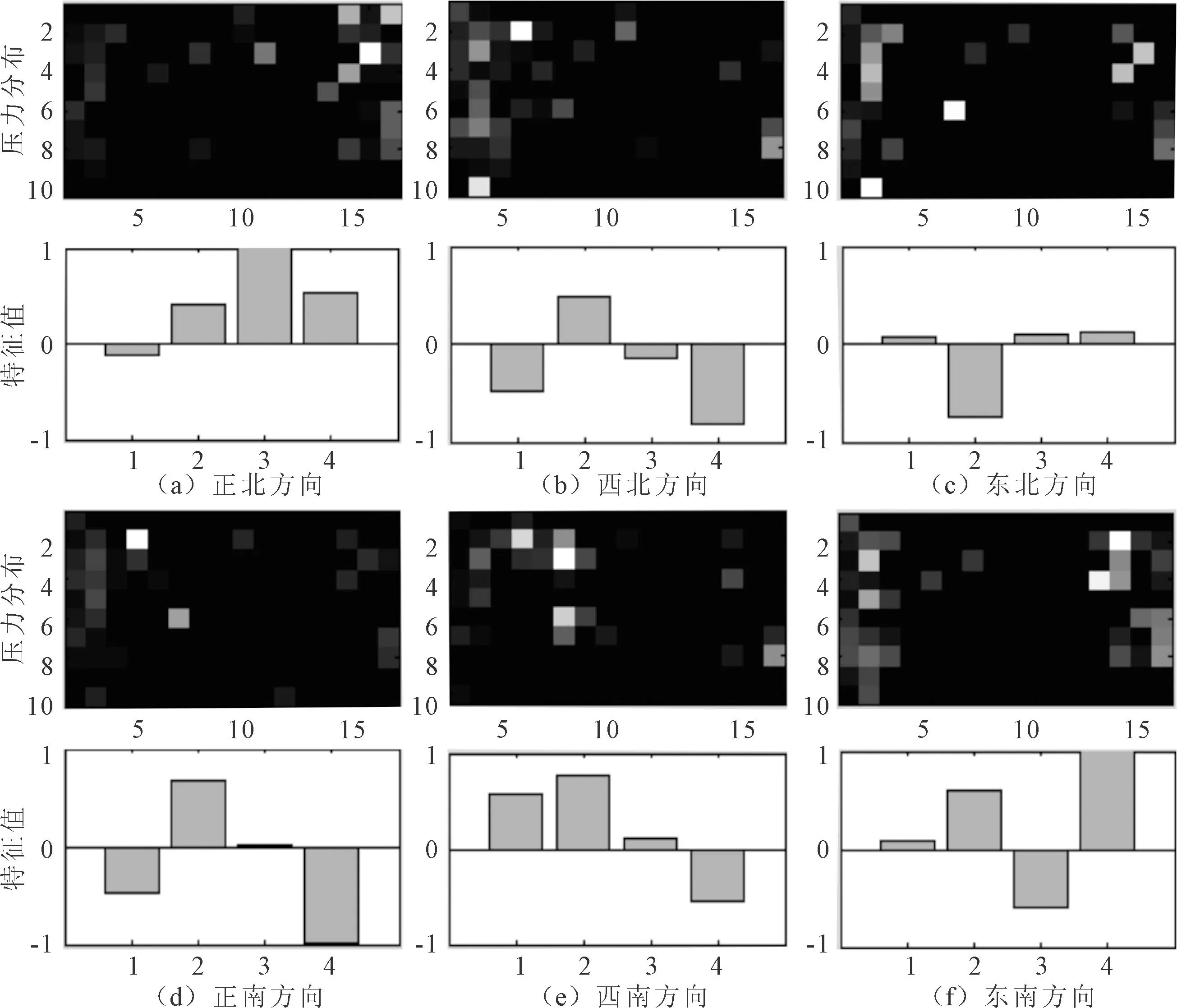
图2 采集到的典型样本及提取的特征值
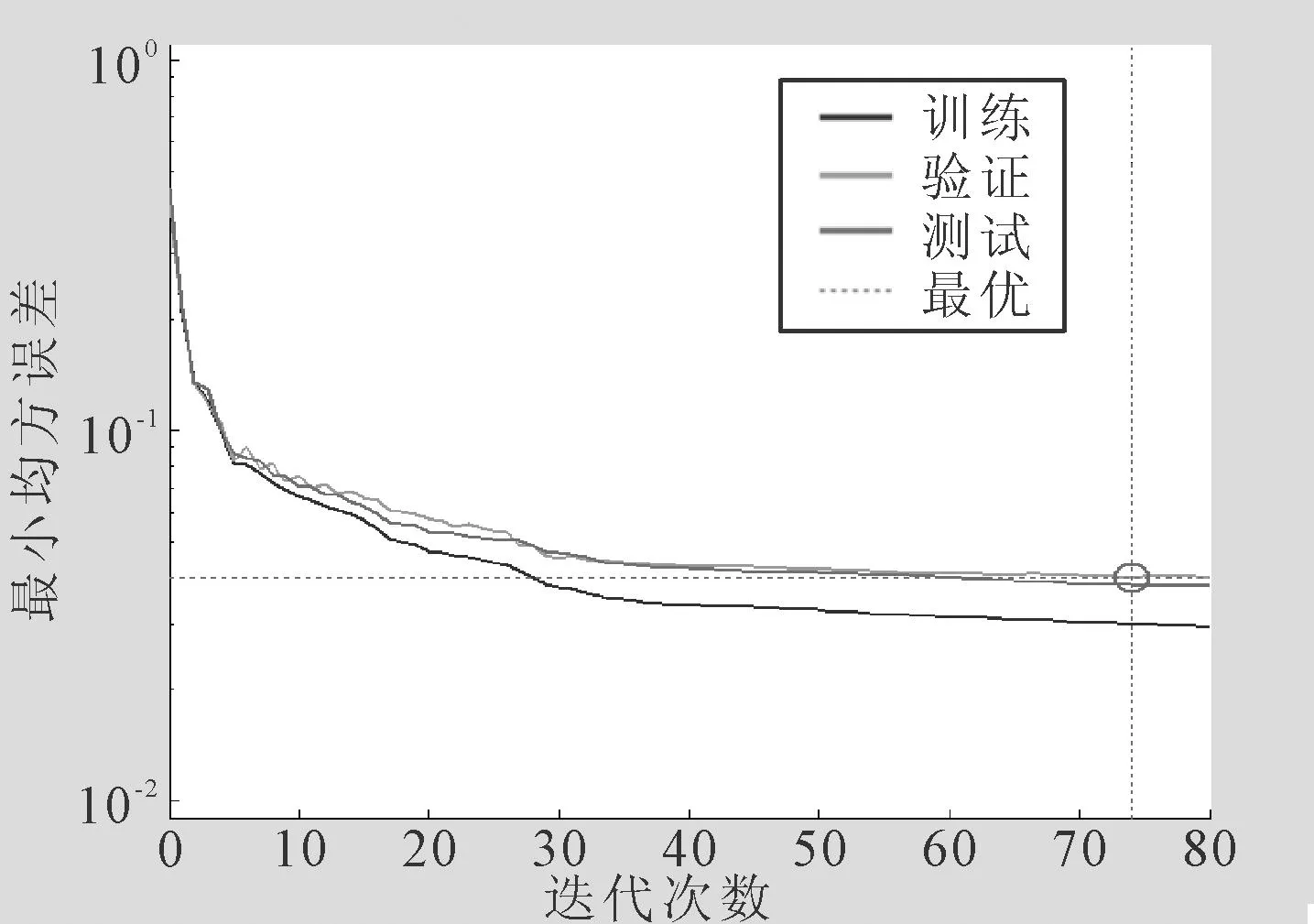
图3 BP神经网络训练结果
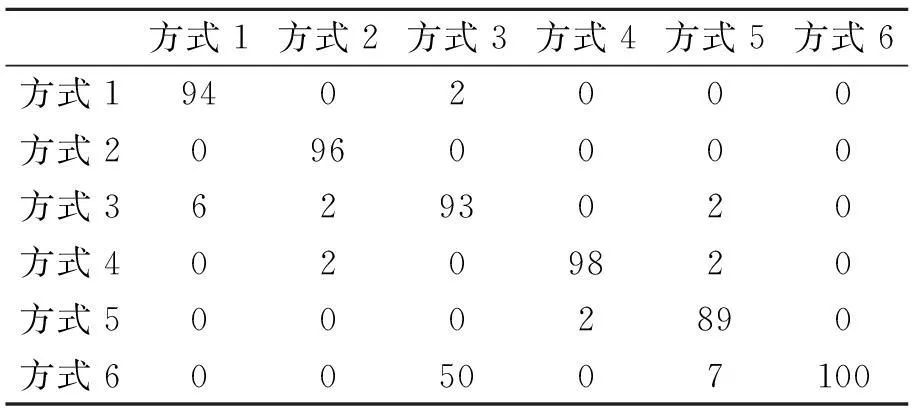
方式1方式2方式3方式4方式5方式6方式19402000方式20960000方式36293020方式40209820方式50002890方式6005007100
BP神经网络按照以下步骤进行训练和测试:①提取所有触觉样品的基本特征并将其分为两部分,每部分是获得试验样本的一半,而且没有共同样本;②用第一部分特征值训练的BP神经网络和相应的预期输出数据创建一个BP神经网络;③相应的输出数据可算出网络的错误,改变权重来减小误差;④重复上述步骤直到网络的误差小于之前设定的阈值;⑤用另一组样品来测试所提出方法的准确度和鲁棒性。
从图3和表1中可以看出,当训练数据和验证数据都包含所有用户的触觉样品时,可以达到93.1%的识别精度。
5结论
笔者采用PCA算法提取触觉感知数据特征,用以消除数据的噪音并且降低维度,然后利用BP神经网络对人机接触方式进行识别分类,对于不同实验对象的训练样本和测试样本,该方法可以实现93.1%的识别正确率,具有较好的鲁棒性和正确率。但在个别二维方向上(西南方向)的识别率较低,需要进一步改进硬件平台设计;未来还需进一步研究三维空间的触觉方向识别,为复杂环境下的人机交互提供更为丰富的意图信息。
参考文献:
[1]ARGALL B D,BILLARD A G.A survey of tactile human-robot interactions[J].Robotics and Autonomous Systems,2010,58(10):1159-1176.
[2]ROBINS B,AMIRABDOLLAHIAN F,JI Z,et al.Tactile interaction with a humanoid robot for children with autism: a casestudy analysis involving user requirements and results of an initialimplementation[C]∥RO-MAN.[S.l.]:[s.n.],2010:704-711.
[3]TIWANA M I,REDMOND S J, LOVELL N H.A review of tactile sensing technologies with applications in biomedical engineering[J].Sensors and Actuators A,2012(179):17-31.
[4]ZHANG T,LIU H,JIANG L,et al.Development of a flexible 3-D tactile sensor system for anthropomorphic artificial hand[J].Sensors Journal,2013,13(2):510-518.
[5]WU H,LIU H,LIU D.Two-dimensional direction recognition using uniaxial tactile arrays[J].Sensors Journal,2013,13(12):4897-4903.
[6]GHINEA G,KANNAN R,KANNAIYAN S.Gradient orientation based PCA subspace for novel face recognition[J].Access,2014(2):914-920.
[7]ZHOU J,GUO A,CELLER B.Fault detection and identification spanning multiple processes by integrating PCA with neural network[J].Applied Soft Computing,2014,1(14):4-11.
ZHOU Rong:Experimentalist;School of Information Engineering, WUT,Wuhan 430070,China.
[编辑:王志全]
文章编号:2095-3852(2016)01-0128-03
文献标志码:A
收稿日期:2015-08-07.
作者简介:周嵘(1974-),女,湖北武汉人,武汉理工大学信息工程学院实验师.
基金项目:国家自然科学基金资助项目(61403289).
中图分类号:TP391
DOI:10.3963/j.issn.2095-3852.2016.01.028
Tactile Pattern Recognition Based on BP Neural Network
ZHOU Rong, WU Haoying
Abstract:To improve the efficiency of communication in human-robot cooperation through tactile information,this paper proposes a method to recognize human intended direction in 2-D using an equipment with tactile arrays.The PCA method is employed in this study to extract essential information thus reduce computation complex and increase robustness.BP neural network is implemented for classifying the intended direction of human operators.Three members of the project team were involved in the study.The efficiency of proposed algorithm is investigated.Experimental results shows that the proposed method could achieve 93.1% recognition accuracy if both the training data and validation data contain tactile images from all the users.
Key words:tactile sensing;PCA method;BP neural network;pattern recognition
