一种GPS伪距单点定位的优化方法与实验分析
2016-08-02苏德亮卢红洋周子麟
苏德亮,陈 伟,卢红洋,周子麟
(1.武汉理工大学信 信息工程学院,湖北 武汉 430070;2.中国交通通信信息中心,北京 100011)
一种GPS伪距单点定位的优化方法与实验分析
苏德亮1,陈伟1,卢红洋2,周子麟2
(1.武汉理工大学信 信息工程学院,湖北 武汉 430070;2.中国交通通信信息中心,北京 100011)
摘要:为了进一步降低伪距单点定位的误差,针对GPS伪距单点定位过程中传播时间的确定问题进行了分析,提出了一种利用迭代法来提高卫星信号发射时刻和传播时间精度的方法,进而更好地提高计算卫星星位的精度,并通过Matlab软件对实测GPS数据结果进行计算来验证算法的可行性。实验结果表明,该优化方法使得三维定位误差减少了5 cm,卫星星位三维方向上更接近真实坐标,误差减少了5 m。
关键词:GPS;伪距单点定位;迭代优化
GPS(global positioning system)伪距单点定位是指通过单台接收机接收并处理观测到的卫星数据来得到伪距观测值,从而解算出接收机位置坐标的定位方法。伪距单点定位因其简单迅速、灵活方便、接收机价格低且能满足实时测量要求的特点和优势,被广泛应用于车辆、船舰、飞机导航,地质矿产勘测,海洋捕鱼等领域[1-2]。在实际定位中,由于卫星广播星历误差、卫星钟差、相对论效应、电离层延时和对流层延时等因素的影响,伪距单点定位精度受到一定程度的限制,难以达到较高的精度。为了研究提高单点定位精度的途径和方法,笔者对伪距单点定位解算过程进行分析,针对卫星位置计算过程中存在的问题,采用迭代优化的方法来求解卫星信号发射时刻以及卫星信号的传播时间,进而提高伪距单点定位的精度,进一步减小定位的误差,并通过实测数据进行验证。
1伪距单点定位数学模型
GPS伪距定位是通过空间距离的后方交会来实现的,如图1所示。理论上,已知3颗卫星坐标及卫星到接收机的距离,联立3元方程组就能计算出接收机的三维坐标。但在实际计算中,接收机的钟差难以测定会导致卫星到接收机的距离出现偏差,在具体计算过程中通常加入接收机钟差这一未知参数,因此需要观测4颗卫星数据来组成四元方程组,才能求解接收机坐标[3-4]。
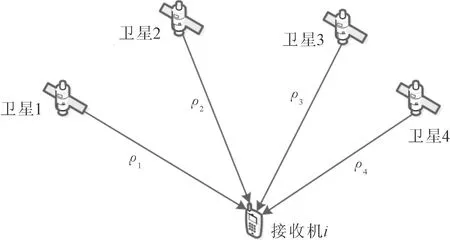
图1 卫星定位基本原理示意图
对于卫星k到接收机i,其伪距定位的基本观测方程为:
(1)

(2)
在实际定位解算中,观测卫星个数为k(k≥4)颗,将伪距方程线性化并联立组成方程组[5-6],如式(3)所示:
(3)

(1)当k=4时,方程组的解为:
(4)
(2)当k>4时,需要用最小二乘法来求解方程组[7]:
(5)
在求出X=[ΔXiΔYiΔZic·dti]T后,加上接收机的近似坐标(X0,Y0,Z0),就可求出最终的接收机坐标(Xi,Yi,Zi)。
2伪距定位的改进
在进行接收机位置定位解算的过程中,运用各种算法求解接收机的位置是最终目的,其中求解卫星的位置和钟差是整个定位过程中较为重要的关键部分。要计算卫星的位置和钟差,卫星信号的发射时刻和卫星的有效星历是两个必需的参数,卫星的有效星历可以从导航电文中获取,而卫星信号的发射时刻则需要计算。通常情况下,计算卫星的位置和钟差采用以下方法。
(1)计算伪距计算卫星信号的发射时刻:
(6)
式中:ts为卫星信号的发射时刻;tr为卫星信号的接收时刻;P为伪距;c为光速。
(2)利用卫星信号的发射时刻ts以及卫星的有效星历计算卫星的位置和钟差。在此过程中,必须要确保有效星历在卫星信号发射时刻的前后2 h之内,即:
(7)
其中,toe为星历参考时间。另外在计算卫星钟差的过程中,必须加上相对论效应校正。
(3)计算地球自转后的卫星位置。令卫星在信号发射时刻的坐标为(xk,yk,zk),地球自转的角速度为ω,则经过t时刻卫星的坐标(xs,ys,zs)为:
(8)
其中,t为卫星信号从发射到接收机接收的传播时间。
通过对上述求解过程分析可知:由于介质的存在,卫星信号在介质中传播时的速度并不等于光速,因此卫星信号的传播时间t并不准确,亦即求得的ts也是不准确的,进而所求得的卫星最终位置和钟差也不准确,最终的定位也存在偏差。
由于介质中的信号传播速度无法确定,t的准确时间不能精确求得。通过以上分析,笔者对该过程进行优化改进,即选取一个近似值,运用迭代的方法,使该近似值无限逼近精确值,达到可以允许的误差范围内,从而求出卫星信号的传播时间t以及卫星的位置和钟差。该优化方法中信号的发射时间ts的计算[8]如式(9)所示:
(9)
式中:S为卫星的位置;Sr为接收机的位置。卫星与接收机之间的几何距离与光速c对应。
利用传播时间迭代法求解信号传播时间、卫星位置和钟差步骤如下:
(1)利用伪距和导航电文中的信号接收时刻,根据式(6)计算卫星信号的发射时刻ts1;
(2)利用计算出的信号发射时刻计算卫星的位置,并根据卫星钟差和相对论效应的公式,计算总的卫星钟差;
(3)由卫星和接收机的位置计算卫星信号的发射时间ts2;
(4)计算地球自转改正后的卫星坐标;
(5)利用地球自转后的卫星坐标和接收机的坐标,再次计算卫星信号的发射时间ts3;

(8)计算结束,输出卫星最终的位置和钟差。
最后得到的卫星信号发射时间和卫星位置就是优化后的结果,其实质就是将两次计算得到卫星信号的发射时间作差,反复迭代直到两者之差在门限内。
3实验仿真及结果分析
实验采用司南导航的M300 GNSS接收机,接收GPS L1、L2频点信号,采集实验原始数据的过程中,接收机位置固定不动,其坐标经过精确测量已知,采集频率为60 s。此次实验一共采集了3次实验数据:实验1(2014年6月26日00:00至23:33)、实验2(2014年7月12日00:00至23:28)、实验3(2014年7月14日11:31至23:59),导出观测值文件和星历文件,在Matlab中进行C/A码伪距单点定位,对比分析优化前后定位的平均误差,如表1所示。

表1 GPS定位优化前后定位平均误差
由表1可知,经过优化后GPS伪距单点定位在X、Y、Z分方向和三维方向的定位误差都有所减小,三维定位误差减小了5 cm左右,这表明经过迭代优化后卫星信号的发射时刻计算更加准确,相应卫星的位置计算也更加准确,经过定位解算后的接收机坐标也更精确。
在实验3中对某一历元(该历元的可见星为2、5、8、15、18、21、26、29、30)计算卫星的位置,利用IGS精密星历中卫星的精确坐标,比较优化前后经计算求得卫星坐标与该精确坐标差值的绝对值大小。
图2~图4所示分别为优化前后可见星与精密星历X、Y、Z坐标之差的绝对值对比情况,可以看出广播星历的精度与精密星历差别较大,坐标差异基本在200 m左右。在运用迭代优化方法后,卫星的坐标与精密星历的坐标之差减小,说明优化后的坐标更加接近真实坐标,并且优化后卫星坐标相对优化前的改变量在5 m左右,效果相对较明显,经过迭代优化方法求得的卫星坐标更加准确。

图2 优化前后可见星与精密星历X坐标之差的绝对值

图3 优化前后可见星与精密星历Y坐标之差的绝对值
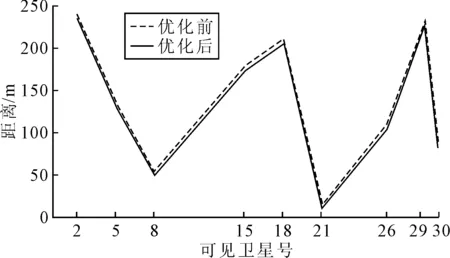
图4 优化前后可见星与精密星历Z坐标之差的绝对值
4结论
伪距单点定位是最基本、最普遍、最简单的卫星定位方式,但由于各种误差的影响,定位精度不是很高。在这种情况下,笔者的研究提高伪距单点定位精度的方法,针对伪距单点定位过程中计算卫星位置的方法进行分析,对信号传播时刻和传播的时间求解采用迭代优化的方法,提出传播时间迭代求解优化计算流程;并利用实际卫星数据进行实验,对比分析实验结果可知,优化后时间求解更加准确,其伪距单点定位结果的三维定位误差降低了约5 cm,卫星在X、Y、Z方向位置坐标更加准确,误差减少约5 m。对于米级定位精度的单点伪距定位精度提高效果虽然有限,但为差分、载波等高精度定位和卫星空间位置确定提供了一种研究方向和思路。
参考文献:
[1]裴霄,王解先.GPS伪距单点定位的精度分析及改进[J].海洋测绘,2012(1):5-7.
[2]安向东.GPS与北斗伪距单点定位性能对比分析[J].全球定位系统,2014(3):8-14.
[3]李鹤峰,党亚民,王世进.GPS伪距单点定位程序实现若干问题[J].全球定位系统,2013(2):33-37.
[4]杨永平,兰孝奇,夏开旺.GPS(组合)伪距单点定位的精度研究[J].勘察科学技术,2006(6):31-34.
[5]AN H T,DONG D C,NING D Q,et al.GPS single point positioning algorithm based on least squares[C]∥Proceedings of the 2013 Sixth International Symposium on Computational Intelligence and Design.[S.l.]:[s.n.],2013:16-19.
[6]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:96-108.
[7]涂刚毅,金世俊,祝雪芬,等.三种GPS定位优化算法的实现及比较[J].中国惯性技术学报,2009(2):170-174.
[8]高猛,徐爱功,祝会忠.双导航定位系统伪距单点定位数据处理方法与精度分析[J].导航定位学报,2014(2):83-88.
SU Deliang:doctoral student.School of Information Engineering,Wuhan University of Technology,Wuhan 430070,China.
[编辑:王志全]
文章编号:2095-3852(2016)01-0106-04
文献标志码:A
收稿日期:2015-09-15.
作者简介:苏德亮(1978-),男,山东金乡人,武汉理工大学信息工程学院博士研究生.
基金项目:国家863计划资金资助项目(2013AA122403).
中图分类号:TN967.1
DOI:10.3963/j.issn.2095-3852.2016.01.023
Optimization Method and Experimental Analysis of a >GPS Pseudo Range Single Point Positioning
SU Deliang, CHEN Wei, LU Hongyang, ZHOU Zilin
Abstract:In the global positioning systems,the pseudo-range single point positioning application has been more widely applied.Taking into account all kinds of error effects,the positioning precision can reach the meter level,how to further improve the positioning precision has also been a research hotspot.In order to further reduce the error of the pseudo-range single point positioning,the problem of determining the propagation time of the GPS pseudo-range single point positioning is analyzed.An iterative method is proposed to improve the accuracy of the satellite signal launch time and propagation time,and better improve the accuracy of the location of the satellite.The measured data of GPS were calculated by Matlab,and the experimental results show that the optimization method for the 3D positioning is reduced by 5cm,the satellite position is closer to the real coordinates,to reduce the error by 5m.
Key words:GPS; pseudo range single point positioning; iterative method
