温室智能装备系列之七十八温室叶茎类蔬菜自动收获机的设计
2016-07-26马伟王秀秦贵
马伟 王秀 秦贵


中国是蔬菜生产大国,其中叶菜占据着蔬菜消费的重要部分,是家庭饮食中不可缺少的蔬菜之一。到2008年,我国叶菜类作物的播种面积是(6.057×106 )hm2,占蔬菜总播种面积的32.5%,叶菜产量占蔬菜总产量的30.5%,每年按7%左右的速度增长[1],其中温室内栽培叶茎蔬菜在反季节期间占到90%以上,而反季节栽培蔬菜产值占到整个蔬菜产值很大的比重。叶菜属于新鲜食材,收获环节受到采收周期短的限制,因此对采收的要求更高,用工量更大。但叶菜采收目前在我国仍然属于手工收获,其劳动强度极大且工作效率低。因此,设计一种茎叶类蔬菜通用采收机械,解决这一需求和生产的实际矛盾,对叶菜的规模化生产会有很大的帮助。
茎叶类蔬菜收获机的设计主要从以下几个方面入手[2-3]:行走底盘的设计、夹持输送机构设计、整体结构设计、控制器设计等,最终完成预想的功能目标。
行走底盘的设计
在温室空间里作业要设计紧凑的轮式或履带式行走机构以满足不同宽度田间移动作业的要求。温室栽培行距有差异,因此行走轮间距以可调为首选。由于叶类蔬菜种植模式为垄上种植,收获方式必然是一垄一收,保证叶类蔬菜收获机收获直线行驶是要解决的,这些设计原则为行走底盘的设计提出了要求。因此采用铰接式底盘是满足行距调节的最佳选择。
叶茎类蔬菜夹持输送机构设计
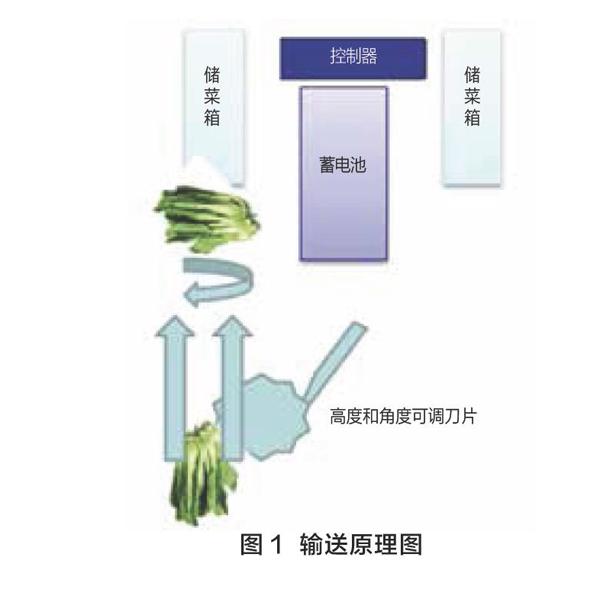
叶菜的收获通过夹持然后再切割的方式,能使采收的叶茎整齐排放在储菜箱内,避免二次整理蔬菜带来的损失。输送机构能实现竖直蔬菜的夹紧收获,然后通过弹性输送带扭转90°,实现蔬菜水平放置,如图1所示。这样的好处是使采收的蔬菜平放进菜箱里。但要具备高度和角度快速可调的刀片,才能解决切割位置点的问题。也可以采用气吸的方式将采收下来的蔬菜收集起来,把收割的蔬菜全部吸进来,作业效率很好,但不足之处是蔬菜不整齐,混合杂物品相不好。
整体结构设计
整体结构的设计要考虑日光温室的特点,温室宽度8~10 m,每个垄上的有效机器操作作业的长度在7~8 m左右,与连栋温室相比,每个作业行较短,设计上选用低重心,总高度0.8~0.9 m;两侧轮独立电机驱动,通过电机差速实现原地转弯,转弯半径1 m左右。人的操作把手高度为0.7 m,可伸缩高度范围为0.7~1.1 m。通过分体控制器设计,实现整机操作时人在2 m距离之外,实现机器作业时人的安全保障。通过整体结构的有效配合来控制割刀的开合,从而完成蔬菜叶茎的收割工作,如图2所示。当蔬菜被割刀切断后,固定在割刀前上方的柔性夹持履带将割下的蔬菜收集后输送到储菜箱内。
设计高度、角度均可调的水平割刀,达到高效、地毯式割尽的目的。为了适应在不同的田块里均能够实现从叶类蔬菜根部地毯式切割,采用高度和角度均可调节的水平割刀,每把割刀根据种植地面的坡度实现角度与高度的调节,并优化最佳切割角度。
设计输送装置起落架与微调装置并联控制系统,实现输送装置与切割刀的高度调节。
控制器的设计
控制器主要包括四部分:刀片调节模块、速度控制模块、行距调节模块和输送带间距调节模块四部分。其中,刀片调节模块含有刀片角度调节,刀片高度调节,用来实现根据叶菜的生长来改变作业刀片的参数;速度控制模块可以实现无极调速行进轮的驱动电机,这样可根据蔬菜生长的状况决定收割速度,通过前进轮的速度就可以调节收获速度。行距调节模块通过电动改变刀片调节杆的夹角大小,改变两个刀片之间的距离,实现不同行垄宽度的对行控制;输送带间距调节模块通过改变弹性输送带两组张紧轮的距离,实现间距的改变,可根据蔬菜茎的粗细进行实时调节。控制器的流程图如图3所示。
国外设计参考
国外相关叶菜采收机的报道为设计提供部分参考[4],其中,韭菜自动采收机动力装置选用充电蓄电池,并选用泡沫输送带加紧韭菜后切割,在输送过程中旋转后进行整齐装箱,见图4所示。不足之处是该设备只能对单行进行采收,无法调节输送带间距,无法针对通用的叶菜采收。
对青菜的采收采用两组锯齿进行切割[5],通过排链输送带直接输送,对采收的青菜不作整理,直接用菜箱储存,如图5所示,采收效率较高,但只针对不分垄的青菜栽培。
应用
2016年3月18日在平谷区设施机械展示会中进行了现场展示(图6),机器自重约60 kg,收割宽度为250 cm,采用24 V电源供电,单行收割,每小时可收割333 m2。该机具备体积小、重量轻,采用电力驱动不会对温室空气产生污染,电机作业噪音小等特点。
结束语
总的来说,温室叶茎类蔬菜自动收获机设计主要原则有:① 行走底盘的设计、夹持输送机构设计、整体结构设计、控制器设计等要逐一计算分析。② 采收机材料应多采用尼龙、铝材等较轻材料,整机自重在50~80 kg为宜。③ 温室封闭环境下动力宜选择电力驱动。④ 转向的灵活性要重点解决,以便适应温室狭小空间。
参考文献
[1]徐少华,孙登峰.叶类蔬菜通用收获机的设计[J].江苏农业科学, 2015,43(3):365-367.
[2]徐少华,秦广明,沈丹波.一种新型叶茎类蔬菜收获机的研制[J].中国农机化学报,2016,37(1):18-21.
[3]高国华.温室雾培蔬菜收获机收获机构的研究设计[J].农机化研究,2015,37(10):91-97.
[4]http://www.jingtian.sh.cn/Products/Detail_49.aspx.2016-3
[5]Ortomec harvester for baby leaf, Spinach, and other leaf vegetables.http://www.andershornstein.se/fr/machines/various-machines/other-harvesters/3556-
ortomec-baby-leaf-harvester/446/.2016-3.
