车身稳定控制系统逻辑及实车测试分析
2016-07-26王振业储军刘万喜高松
王振业,储军,刘万喜,高松
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
车身稳定控制系统逻辑及实车测试分析
王振业,储军,刘万喜,高松
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
车身稳定控制系统(ESP)已经广泛用于国内外汽车市场,基于此本文对于该系统的控制逻辑、IO系统关系进行分析和说明,并且通过实车在典型路面上能够触发ESP功能的测试进行曲线分析,体现出ESP功能的作用及其重要性,并且引起人们对于该系统的重视。
车身稳定控制;期望轨迹;实际轨迹;信号;失控
10.16638/j.cnki.1671-7988.2016.06.047
CLC NO.: U467 Document Code: A Article ID: 1671-7988 (2016)06-136-04
引言
汽车电子技术的快速发展为主动安全技术带来了全新的理念,各种主动安全控制装置相继出现,并很快成为满足乘坐舒适、操纵方便和改善汽车主动安全性、减少车辆交通事故的有效手段[1]。作为主动安全系统中的重要组成,电子智能化的制动系统势在必行。
打滑的车辆可以通过对单个车轮的特殊制动、降低发动机扭矩和正确的转向来保持稳定性,到2003年,自动制动调整和自动降低发动机扭矩已经实现,而自动转向调节仍处在发展阶段。虽然刹车防抱死系统(ABS)和牵引控制(ASR)对改善车辆安全做出了突出贡献,但近几年兴起的车身稳定控制系统(ESP/ESC)似乎显得更加尽职尽责[2],不仅将ABS、TCS以及EBD功能集成进去,更有较为先进的子功能如坡起辅助功能(HSA)、陡坡缓降功能(HDC)、液压辅助制动功能(HBA)等。看似五花八门的功能,让人感觉实用性不强,但是这些功能的应用确实能够提高我们日常驾驶甚至突发工况下的安全。
1、ESP功能逻辑
ESP检测转向角度,横向加速度,横摆角速度,判断车辆实际行驶姿态,同时根据动力学模型计算理想行驶轨迹,并对两者进行比较判断车辆是不足转向还是过度转向,通过对相应车轮施加合适的压力和控制发动机扭矩,来避免汽车不足转向和过度转向[3]。
1.1IO系统逻辑
通过IO逻辑图可以看出ESP系统在接收到四轮的轮速传感器信号、内置的侧向加速度传感器和横摆角速度传感器信号以及 CAN网络中的发动机扭矩信号、方向盘转角信号之后,由内部ECU对信号做处理,再通过控制液压单元HCU以及给发动机 EMS输出请求信号,最后将由制动器和发动机来对车辆进行控制[4]。
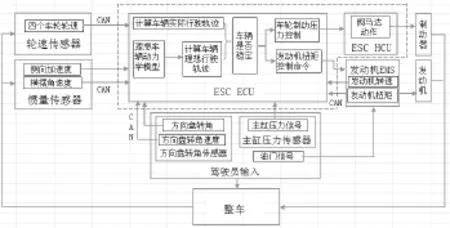
图1 ESP模块IO系统逻辑框图
1.2ESP系统控制原理
ESP侦测驾驶意图:方向盘的位置+车轮速度+油门位置+制动压力= ECU识别驾驶意图。在驾驶员实际操作过程中,对应的传感器通过硬线或者CAN线将信号传递给ESC,利用理想车辆动力学模型计算出理想的行驶轨迹[5]。
ESC识别车辆的状态:横摆角速度+侧向力(加速度)= ECU 计算并识别车辆的状态ESC内置惯量传感器将车辆当前的横摆角速度和侧向加速度通过计算,得出车辆的当前状态。ESC将理想行驶轨迹和实际状态进行对比,判断车辆是否处于稳定,通过对比进行调整,起到稳定车辆理想轨迹的作用。具体逻辑示意图参见图2。

图2 ESP控制原理逻辑示意图
1.3ESP系统液压单元控制原理
ESP系统在 ABS系统液压单元的基础上增加了高压阀(图示中3号元件)和回路控制阀(图示中4号元件)。ABS系统可以通过控制输入阀和输出阀的工作防止车辆抱死,ESP系统功能更加强大,它增加的高压阀和回路控制阀可以直接控制四轮的轮缸压力,在监测到车辆轨迹偏差后无需进行制动,由内部ECU控制阀体对能够维持期望轨迹的单个车轮轮缸施压,矫正车辆的实际行驶轨迹,按照驾驶员的意图行驶。在接下来的实车典型路面测试中,我们将会通过测试记录(简称Trace)的曲线图来观测到关键信号对ESP系统的影响和对于车辆单个车轮轮缸压力的控制。

图3 ESP模块液压控制单元原理图
2、实车测试分析
针对低附及高附路面的动态测试,可以更加直观的监测到 ESP系统作用,通过对这些路面的曲线分析,了解 ESP系统功能执行的信号源以及调整方式。
2.1干沥青路面下自由滚动双变道

图4 干沥青路面自由滚动双变道曲线图
通过曲线可以看出,车辆自由滚动情况下方向盘转角从0°发生变化,即车辆此时开始进行变道,同时横向加速度和横摆角速度信号也开始变化,满足控制逻辑的信号输入。在转角达到-220°(即车辆朝右行驶)后开始进行反向操作,车辆再次换道,此时由于转角的明显变化极易出现甩尾现象。在Trace中我们发现VDC动态信号在转角由-220°到220°变化期间发生变化:由0置1即ESP功能开始启动,此时左前轮的轮缸压力升高;随着转角的再次变化,右后轮的轮缸压力开始增加。通过对曲线图4的监测,我们可以确定车辆在进行双变道操作。在这种操作工况下ESP系统根据实际行驶轨迹与期望轨迹的差异对单一车轮的轮缸压力进行调节,纠正车辆当前行驶轨迹,避免出现甩尾和失控的现象。在此过程中我们也能够发现车轮并没有出现抱死和明显变化,说明系统在整个行驶过程中将保持车辆的滑移率,防止制动性能的下降。
2.2压实雪面下自由滚动双变道
压实雪面下进行的测试也是在自由滚动状态下开始变道,转角达到200°,在转角进行反向变化(200°至-200°)过程中,VDC动态信号开始跳变(由0置1)此时ESP功能启动。ESP根据横摆角速度信号变化分别对四轮的轮缸压力做出调整,在判断车辆即将出现朝左后方甩尾的现象后,左后轮轮缸压升高至 20bar,产生一个逆时针的力矩将车尾朝左侧纠正;转角在持续变化过程中右后轮也开始进行增压调节。在整个双变道过程中,通过对车辆运行轨迹的期望值与实际值对比分析后调整四轮轮缸压力,进而控制车身在行驶过程中发生转向过度引起的甩尾。在Trace中可以看出尽管在压实雪面这种极易打滑的路况下,四轮的轮速一直趋于一致,期间的左前轮和右前轮会出现短暂性的速度差异,但这不会影响整车的行驶性能。
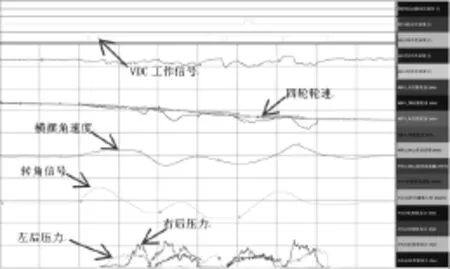
图5 压实雪面下自由滚动双变道曲线图
2.3压实雪面,ABS制动双变道
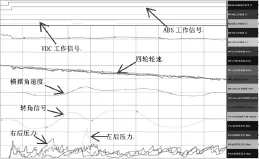
图6 压实雪面下ABS制动双变道曲线图
在压实雪面这种低附着路面上,车辆极易出现失控现象,在此路面进行ABS制动的同时进行变道,同样会触发 ESP功能。由Trace曲线图可以看出在触发ABS防抱死功能后,ESP会控制到车轮的滑移率在10%-35%范围内,四轮的轮缸压力不断进行调整。此时开始进行变道,由转角变化引起横摆角速度发生变化时,VDC工作信号由0置1即ESP功能触发,这时会发现右后轮的轮缸压力和左后轮的轮缸压力会出现一个极为明显的变化,ESP根据横摆角速度和侧向加速度计算出车辆的状态,在判断车辆有向右甩尾意图时对右后轮的轮缸进行增压,给车辆一个顺时针力矩来保持车身稳定。在此曲线中也可发现具有 ABS功能的车辆在制动状态下依然可以进行方向的控制,并且在ABS与ESP起作用的整个过程中四轮的轮速始终保持一致。
2.4压实雪面下全油门的环道驾驶

图7 压实雪面下全油门环道曲线图
环道的测试比起变道会缓和很多,角度变化在此路况下并不剧烈,但是由于压实雪面这种低附路面的特殊情况,依旧会有车辆失控的风险存在。我们在转弯半径为110的环道雪面进行测试,根据车辆行驶的Trace曲线可以看出,各个信号曲线都很平稳,在监测到纵向加速度和横摆角速度信号发生变化时,VDC工作信号由0置1即ESP功能开始作用。此时会发现右前轮和右后轮的轮缸压力开始增加,也就是说车辆在弯道外侧的两轮通过调节其轮缸压力,从而施加一个顺时针的力矩,防止车辆由于附着力不足导致的向右侧甩尾,。在测试全过程中车辆始终能够维持稳定状态,四轮轮速也保持一致,充分的体现出了ESP功能的重要性。
2.5干沥青路面下全油门蛇形绕桩驾驶
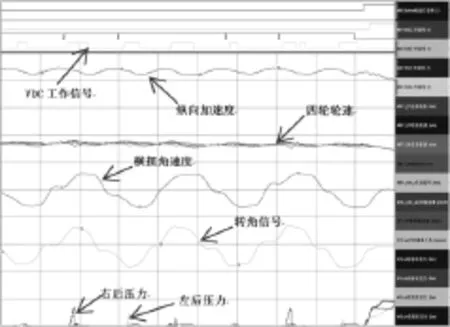
图8 干沥青路面下全油门蛇形绕桩曲线图
最后对驾驶技术要求较高的蛇形绕桩进行测试,在干沥青的路面上不存在附着力不足的情况,车辆稳定性会比较好,但在全油门的蛇形绕桩过程中由于转角的不断改变,车速也未减慢,车辆会有转向不足或者转向过度的情况。如若出现此类情况,对于驾驶技术的要求会大大增加,驾驶员对车辆行驶轨迹的判断能力和修正能力会有很高的要求。在测试过程中,根据Trace曲线图可以看出,在方向不断变化的前提下,车辆横摆角速度会和转角同步变化,VDC工作信号也会随之进行相应的跳变,ESP的作用会在其中体现出来。在每一次ESP起作用的时候,相对应的车辆轮缸压力会有明显变化。在ESP的功能干预下,车辆能够保持良好的循迹性,服从驾驶员的操作意图。
根据我们在各种典型路况下对车辆的测试,会发现ESP功能都会起到较为重要的作用,避免车辆失控现象的出现。
3、总结
随着社会的不断发展,汽车已经变为一种生活必需品,易驾和智能化也已逐渐成为客户选购车辆的重要条件之一,而在新车型的开发过程中也不断的将客户的需求作为产品定型的要素。在经历了传统制动、ABS防抱死功能和TCS牵引力控制功能的介入之后,性能更加突出、功能更加全面的ESP技术应用越来越多,从开始进口合资品牌的高配车型才能见到逐渐变为几乎在自主品牌新生代车型上标配,说明客户和市场已经接受并认可了它,并且在车辆处于危险状态时能够及时进行补救,降低了交通事故的发生率,挽救许多人的生命[6]。相信在未来,随着科技的不断进步,驾驶辅助各项先进技术的成熟应用会使我们能够做出更加智能和安全的车辆。
[1] 刘晶郁,李晓霞.汽车安全与法规[M].4版.北京:人民交通出版社,2005.8.
[2] 林扬.庖丁解车[M]深圳:海天出版社,2006.
[3] 刘超,何平,顾国磊,等.基于线控4WS车身稳定控制系统的设计[J].哈尔滨商业大学学报,2014(8):461-463.
[4] 李亮,宋健,祁雪乐.汽车动力学稳定性控制系统的研究现状与发展趋势[J].农业机械学报,2006,37(2):141-144.
[5] 绕运涛,邹继军,王进宏,等.现场总线CAN原理与应用技术[M].2 版.北京:北京航空航天大学出版社,2007.
[6] 张岩,刘万喜,应卓凡,等.浅析轿车自动驻车保持功能开发[J].农业装备与车辆工程,2015,53(6):59-62.
Logic of Electronic Stability Program and commissioning test
Wang Zhenye, Chu Jun, Liu Wanxi, Gao Song
( Anhui Jianghuai Automobile Co. Ltd, Anhui Heifei 230601 )
Electronic Stability Program(ESP)has been widely used in domestic and international automobile market. Based on it, the article is aimed at analyzing and explaining the control logic of the system and IO system. Furthermore, the article also reflect the role and significance of ESP function and cause people to pay more attention to the system, through analysis the vehicle on the typical pavement triggering the function of ESP curve analysis.
Electronic Stability Program(ESP); Desired trajectory; The actual trajectory; Signal; Out of control.
王振业,就职于安徽江淮汽车股份有限公司。
U467
A
1671-7988 (2016)06-136-04
