汽车最速操纵逆动力学建模及操纵稳定性分析
2016-07-26陈肖媛胡雪芳苑风云
陈肖媛,胡雪芳,苑风云
(青岛黄海学院,山东 青岛 266427)
汽车最速操纵逆动力学建模及操纵稳定性分析
陈肖媛,胡雪芳,苑风云
(青岛黄海学院,山东 青岛 266427)
针对已有的汽车三自由度操纵动力学模型展开研究,提出一种简化方案。引入方向盘转角方程和驱动力方程组将操纵动力学的“正问题”转化为“逆问题”,利用改进的直接配置非线性规划方法和序列二次规划混合法进行求解。对比分析ADAMS/Car和MATLAB仿真结果,从侧面上验证了模型的正确。表明文章建立的汽车最速操纵逆动力学模型合理。
逆动力学;建模;操纵稳定性评价;仿真
10.16638/j.cnki.1671-7988.2016.06.030
CLC NO.: U467 Document Code: A Article ID: 1671-7988 (2016)06-86-02
前言
目前,高速行驶汽车安全性是一个社会焦点问题,高速行驶的汽车操纵稳定性能决定着汽车安全性和驾驶性能,因此高速行驶的汽车的操纵稳定性成为汽车研究的重要领域。汽车操纵逆动力学通过已知汽车行驶状态反求驾驶员操纵,进而判断求解结果是否为驾驶员所接受,避开了确定驾驶员参数的“瓶颈”问题。当汽车性能为最速性时,就转化为汽车最速操纵逆动力学问题。本文即是将汽车最速操纵与逆动力学相结合进行建模和求解,并利用该模型对最速操纵稳定性进行了简要仿真分析。
1、汽车最速操纵逆动力学模型
1.1“正问题”的简化
对车辆进行受力分析,可得运动微分方程、线性轮胎方程、纵向载荷转移方程、运动轨迹方程。在汽车操纵动力学的“正问题”的模型中,方向盘转角和驱动力/制动力都属于模型的控制变量,根据最优控制理论构造哈密顿(Hamilton)函数,利用邦邦(BANGBANG-)控制律判定汽车的操纵输入,根据模型的状态方程和时间最短性能构造哈密顿函数。
将汽车驱动时的条件Fxr=0代入汽车运动微分方程、线性轮胎方程和轮胎纵向载荷转移方程,整理得:
方程组(2)是简化的线性轮胎方程,避免了对后轮受力的讨论,从而将一个存在分段函数的驱动力/制动力输入简化为驱动力输入,原模型中未知量的个数减少一个,这样就大大简化了模型。
1.2“逆问题”的转化
通过引入方向盘转角方程和驱动力方程组,分别用于求解方向盘转角和驱动力输入,将汽车操纵动力学的“正问题”转化为汽车操纵逆动力学。
1.3数学建模
由驱动力方程组、转向角方程、汽车运动半径和航向角方程可建立汽车操纵逆动力学模型。把模型整理成矩阵形公式:
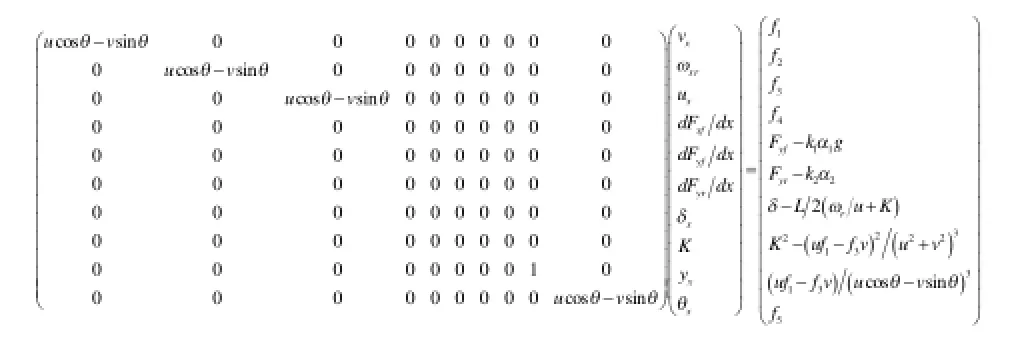
本文建立的数学模型,以优化后的双移线做为控制集来反求驾驶员操纵输入,然后建立双移线路经并优化,对该模型采取侧翻约束,前轮驱动力约束,和边值约束后对最速操纵问题进行重构。
2、汽车最速操纵问题的重构
对已建立的数学模型进行参数化最优控制,并利用线性插值法,在已知初始值的条件下,可以积分状态方程,计算出最优性能指标。
至此,汽车最速操纵逆动力学就转化称非线性规划问题,然后运用序列二次规划方法(SQP)求解。
3、仿真分析
3.1整车建模
本文利用多体动力学软件ADAMS/CAR建立的整车模型包括的子系统有:麦弗逊前悬架、双横臂后悬架、齿轮齿条转向器、UA轮胎模型、动力传动系统、制动系统等组成;然后建立各子系统之间的信息交换器,最后组装成整车模型。
3.2仿真结果
1)方向盘转角速度仿真结果
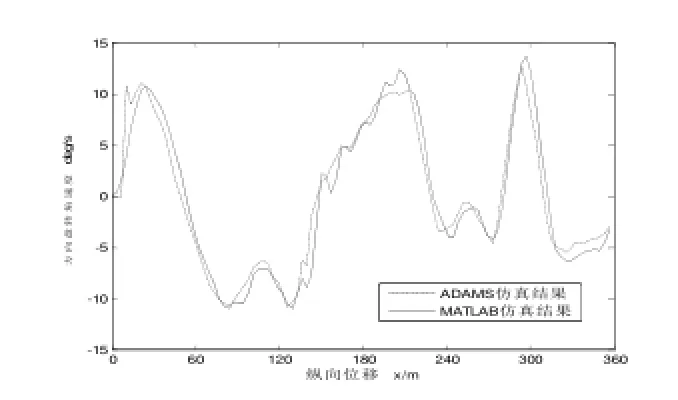
图1 方向盘转角速度仿真结果
图1给出了ADAMS/Car和MATLAB方向盘转角速度仿真结果,方向盘转角速度在100m和250m附近呈现W形态,在20m、200m和300m处有较大的方向盘角速度,表明此时驾驶员比较忙碌。
2)驱动力仿真结果
图2给出了ADAMS/Car和MATLAB驱动力仿真结果,汽车驱动力在整个行驶过程中呈现凸函数特征,最初阶段是ADAMS/Car相比MATLAB有较大的驱动力,在 50m之后MATLAB仿真数值超过ADAMS/Car仿真数值,在整个超车过程中ADAMS/Car整车模型相比本文建立的三自由度模型具有更稳定的驱动力。
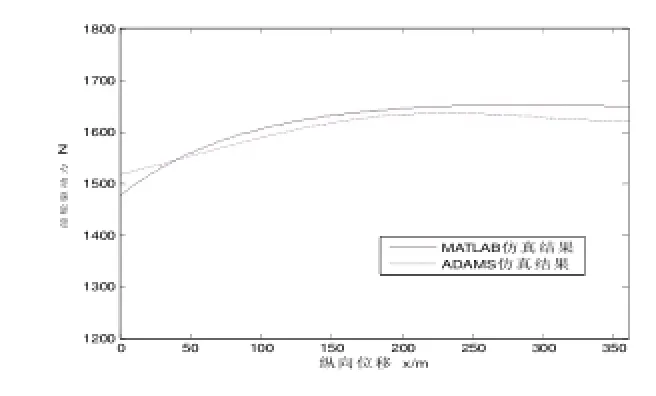
图2 前轮驱动力仿真结果
4、结论
本文参考已有的三自由度汽车最速操纵动力学模型,利用时间最短性能指标构造哈密顿函数,通过哈密顿函数得到正则方程,对非定常正则方程进行求解,利用BANG-BANG控制律证明汽车在整个超车过程中一直处于驱动状态;据此,可以简化轮胎线性方程,减少驱动力方程组未知量的个数,有关驱动力的方程组构成封闭的方程,可以求解驱动力隐形函数;根据侧偏角推导方向盘转角方程,用于求解方向盘转角;将汽车操纵动力学的“正问题”转化操纵动力学的“逆问题”;通过对模型进行参数化、离散化、线性化和归一化,把原动态优化问题转化为静态规划问题,最后运用序列二次规划方法进行求解;最后对比分析ADAMS/Car仿真结果和MATLAB仿真结果,符合极小值原理,表明该汽车最速操纵逆动力学模型是合理的,并且该模型可以为汽车最速操纵稳定性评价提供一定的参考价值。
[1] 张丽霞, 陈肖媛, 潘福全. 汽车最速操纵操纵稳定性评价指标研究[J].科学技术与工程, 2014.
[2] 吴杰, 赵又群, 杨国权.汽车方向盘角输入识别的研究[J]. 机械科学与技术, 2006, 25(10):1175-1177.
[3] 尹浩, 赵又群, 吴杰. 基于汽车操纵逆问题的蛇行试验分析研究[J].机械科学与技术, 2007, 26(12):1640-1643.
[4] 刘英杰, 赵又群, 许健雄,等.基于 Gauss 伪谱法的紧急避让汽车操纵逆动力学[J]. 机械工程学报,2012,48(22):127-132.
[5] 邱笑寅. 高速紧急避让汽车操纵逆动力学的建模与仿真[D]. 南京:南京航空航天大学,2011.
[6] 张丽霞, 赵又群, 宋桂霞等.汽车最速操纵问题的逆动力学研究[J].中国机械工程, 2007.
Vehicle Minimum time Handling Inverse Dynamics and Handling Stability Analysis
Chen Xiaoyuan, Hu Xuefang, Yuan Fengyun
( Qingdao Huang Hai University, Shandong Qingdao 266427 )
This paper expands an research on existing car three degrees of freedom manipulator dynamics model, proposes a simplified scheme. The introduction of the steering wheel angle and the driving force equation equations will operate the dynamics of "direct problem" into "inverse problem". This paper compares analysis of ADAMS/Car and MATLAB simulation results, Path Problem Results in line with the principle of minimum requirements, which made extreme value on the boundary of the system input. Finally, the model car minimum handling and stability were briefly evaluated. It shows that the minimum handling inverse dynamics model is reasonable.
inverse dynamics; Handling Stability Evaluation; simulation
陈肖媛,就职于青岛淮海学院。
U467
A
1671-7988 (2016)06-86-02
