低压微型直流微电网的协调控制策略
2016-07-24张富洲姚楠郭雪丽王修庞李吉浩
张富洲,姚楠,郭雪丽,王修庞,李吉浩
(国网南阳供电公司,河南南阳473005)
低压微型直流微电网的协调控制策略
张富洲,姚楠,郭雪丽,王修庞,李吉浩
(国网南阳供电公司,河南南阳473005)
直流微电网具有结构简单、运行可靠和能耗较小等优点,将成为偏远山村和未来家庭的主要供电结构。以由太阳电池阵列、蓄电池组和可控负载等组成的低压微型光伏直流微电网系统为研究对象,针对系统并网和孤岛运行模式,采用了主从并联和母线电压下垂相结合的控制模式,实现了直流微电网的能量协调控制。最后,基于Matlab/Simulink仿真平台和光伏直流微电网实验装置,对系统进行了仿真研究,仿真验证了系统能量协调控制策略的合理性和正确性。
直流微电网;主从并联控制;电压下垂控制;最大功率点跟踪
在追求低碳社会的今天,太阳能作为一种清洁的分布式再生能源被广泛应用。随着电力电子技术和储能技术的不断提高,直流微电网将得到快速发展。直流微电网具有控制简单、运行可靠和能量损耗较小等优点,将成为偏远山村和未来家庭主要供电模式之一[1-2]。
直流微电网的研究重点是分布式发电模块、储能装置和负载之间的协调控制[3-4]。目前,微电网中常用的协调控制方法为主从并联法和母线电压下垂法[5]。采用主从并联法的直流微电网中须包含主单元和从单元。主单元负责稳定母线电压,采用恒压控制;从单元采用恒流控制,控制策略简单可靠,唯一的不足是各单元之间需要快速通信,对通信条件要求较高。而母线电压下垂控制法是利用各个单元的输出电流,改变单元的等效输出电阻,实现均流控制。母线电压下垂控制在本地实现,不需要各单元之间的快速通信,提高了微电网运行的可靠性。
为充分利用以上两种方法的优点,采用主从并联和母线电压下垂相结合的控制策略[6-7]。当电网正常运行时,采用主从并联控制方法,以微电网与主电网的接口电路为主单元,控制母线电压恒定;当电网发生故障时,采用母线电压下垂控制方法,各单元根据下垂控制曲线,控制输出电流,从而维持微电网的能量平衡。
1 系统结构
本文研究的低压微型光伏直流微电网拓扑结构如图1所示,该系统由光伏电池阵列发电、蓄电池组储能和直流负载等单元组成。系统直流母线电压Udc为350 V,光伏电池阵列通过Boost功率变换器向直流母线输入电能;蓄电池组通过双向DC/DC变换器与直流母线相连,实现充放电的功能;直流负载通过Buck变换器从直流母线吸收电能;整个直流微电网通过三相全桥逆变器与主电网相连,实现能量协调控制。
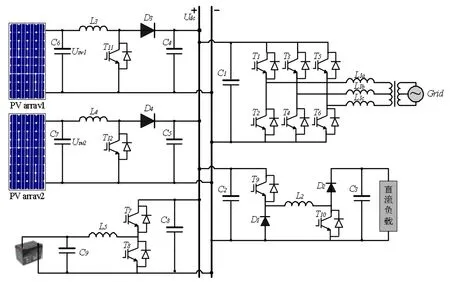
图1 直流微电网拓扑结构
2 系统协调控制策略
2.1 直流微电网并网模式的控制策略
主电网运行正常时,以三相全桥逆变器作为主单元,蓄电池组作为负载,不能工作在放电模式。当光伏阵列产生的能量大于负载所需能量时,三相全桥逆变器工作在逆变模式,把微电网内剩余能量以单位功率因数输送到主电网;当光伏阵列产生的能量不足时,三相全桥逆变器工作在整流模式,并以单位功率因数从主电网内获取电能。三相全桥逆变器不但要维持微电网中的能量,而且还必须稳定微电网中直流母线电压Udc=350 V。
2.2 直流微电网孤岛模式的控制策略
当主电网发生故障时,系统采用直流母线电压下垂控制方法,光伏电池阵列和蓄电池组的静态V-I特性曲线如图2所示。
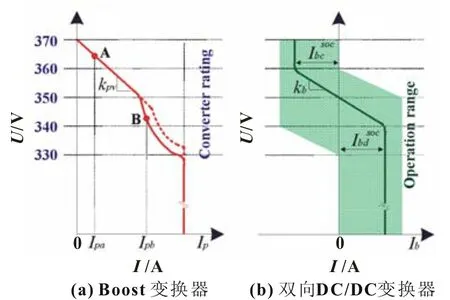
图2 微电网内能量单元的静态V-I特性曲线
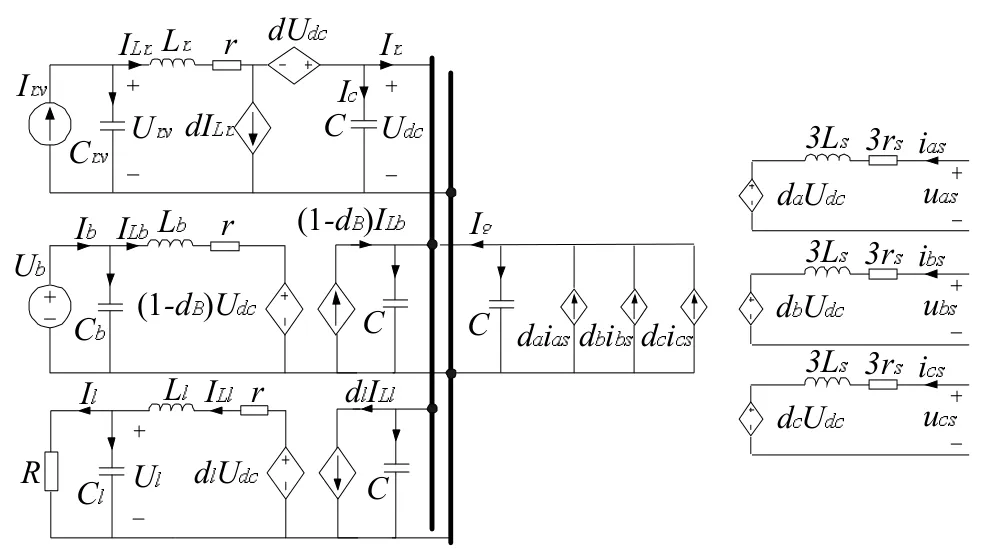
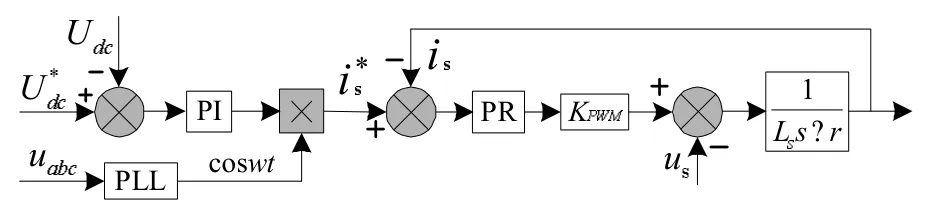
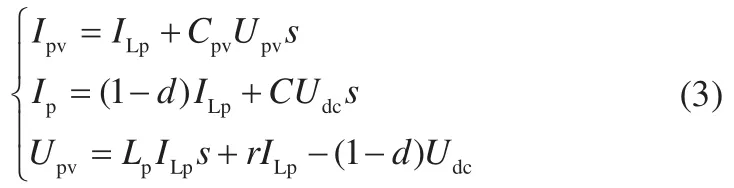
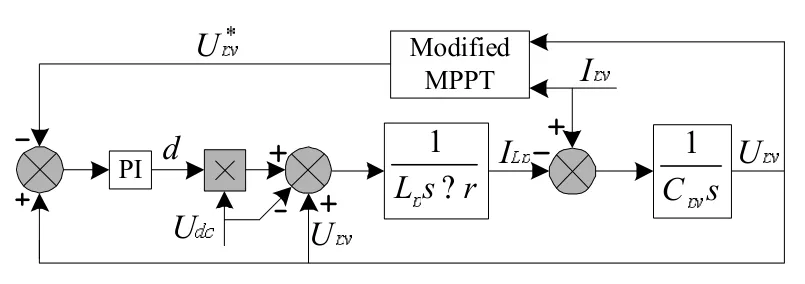
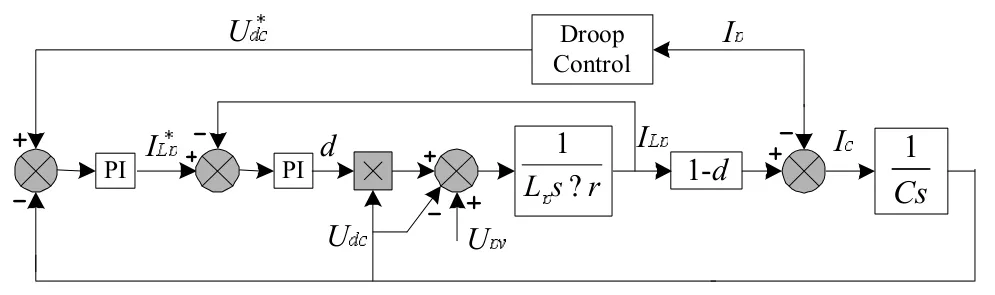
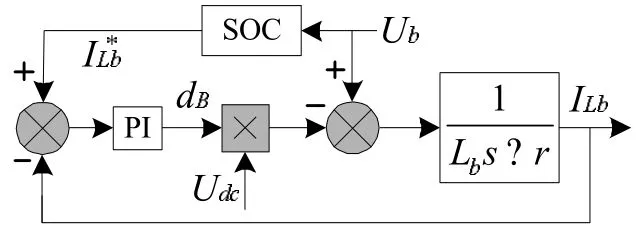
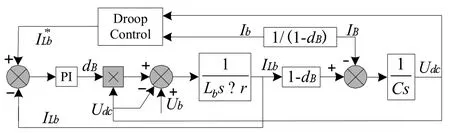
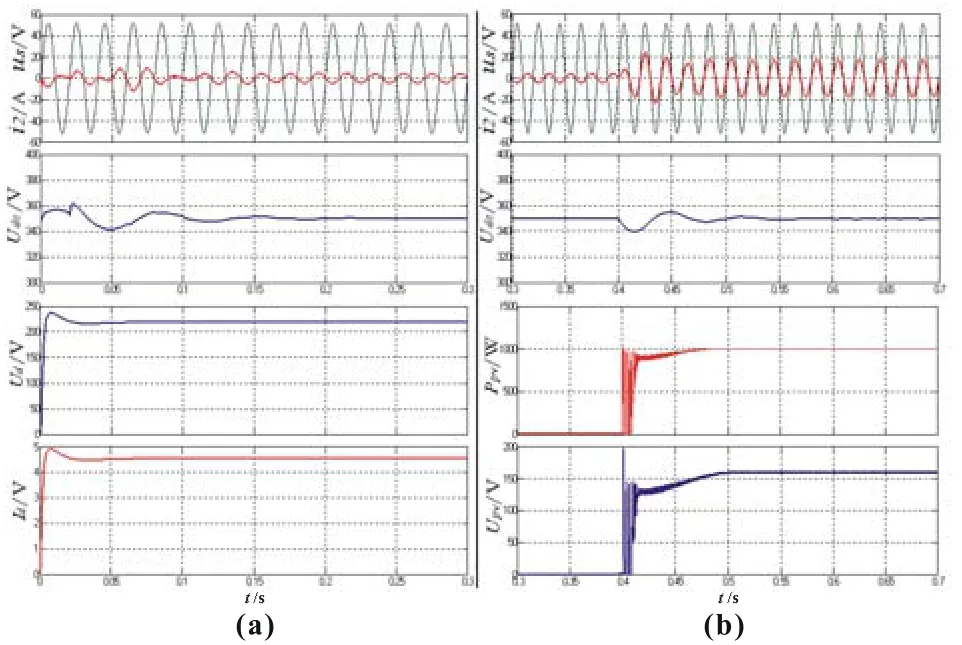
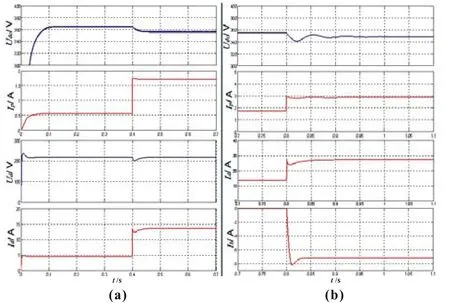
由图2(a)可得,当350 V 系统启动时,Boost变换器工作在电压下垂控制模式,规定此时负载功率为额定值的40%,则Boost变换器的下垂控制曲线斜率kpv为: 式中:Usp为空载时的设置点电压,这里取370 V;Um为下垂曲线上最低电压值,这里取350 V;Pl=4 kW,为负载额定功率;n=2,为光伏电池阵列的组数。 双向DC/DC变换器的电压下垂控制曲线斜率kb为: 式中:Umbc=360 V,为最大充电电流Ibc对应的最小母线电压;Umbd=340 V,为最大放电电流Ibd对应的最大母线电压,设置Ibc=-20 A,Ibd=20 A。 基于以上分析,直流微电网各单元的6种可能的工作模式如表1所示。 ?????????????????????? Boost??? ??DC/DC??????????????/V??? MPPT ???/?? ??(??) 350??? MPPT ???/?? ??(??) 350??? ??? ???/?? ??(??) 350??? ???? ???/?? ??? 350~370??? MPPT ???/??/ ? ??? 330~350??! ??? ? ??? 330~350 光伏直流微电网的接口变换器的大信号平均模型如图3所示,图中标出了各单元电流正方向。 图3 光伏直流微电网大信号平均模型 3.1 主电网接口电路控制策略 主电网接口电路为三相全桥逆变器,其控制结构如图4所示。直流母线电压采用PI控制器,并网电流采用比例谐振(PR)控制器。并网模式下,母线电压Udc恒为350 V。 图4 三相全桥逆变器控制框图 3.2 光伏阵列接口电路控制策略 光伏阵列接口电路为Boost变换器,根据图3得出该变换器的平均模型为: Boost变换器有最大功率跟踪控制和电压下垂控制两种模式。当主电网正常运行时,微电网直流母线由三相全桥逆变器稳定,Boost变换器运行在最大功率跟踪控制模式,本文采用的MPPT算法为基于PI控制器的变步长扰动观察法,该模式控制结构如图5所示。 当主电网发生故障时,Boost变换器运行在电压下垂控制模式,控制曲线如图2(a)和式(1)所示。母线电压Udc高于350V时,采用下垂控制模式,Udc低于350 V时,采用MPPT控制模式,以最大功率输出,稳定母线电压。下垂控制模式结构如图6所示。 图5 Boost逆变器最大功率跟踪控制框图 图6 Boost逆变器下垂控制框图 3.3 蓄电池组接口电路控制策略 蓄电池组接口电路为双向DC/DC变换器,根据图3得出该变换器的平均模型为: 式中:dB为开关T8的占空比。 主电网正常运行时,双向DC/DC变换器只有充电和不工作两种模式,其控制结构如图7所示。SOC算法根据蓄电池组输出电压得到合适的充电电流,充电方法采用三阶段充电法,电流控制环节采用PI控制器。 图7 并网模式下蓄电池组充电控制框图 当主电网发生故障时,双向DC/DC变换器运行在电压下垂控制模式,控制曲线如图2(b)和式(2)所示。母线电压Udc满足340 V 图8 孤岛模式下蓄电池组充放电控制框图 3.4 负载接口电路控制策略 负载接口电路为常用的Buck变换器,根据图3得出该变换器的平均模型为: 该变换器采用电压电流双闭环控制结构,如图9所示。通过改变负载电压Ul的大小,调节负载功率,电压和电流环均采用PI控制器。 图9 负载接口电路控制框图 为了验证上述控制策略的正确性,基于Matlab搭建了系统仿真平台,系统仿真模型如图10所示。 图10 系统仿真模型 由图10可知,该系统由光伏发电模块、储能模块、负载模块和电网侧接口模块等组成,其中光伏发电模块由5组额定功率为2 000 W的光伏阵列发电单元组成,蓄电池组由10块12 V/100 Ah的蓄电池串联而成。 4.1 并网模式仿真结果 并网模式下,光伏直流微电网启动时的仿真结果如图11(a)所示,为便于观察,缩小了变压器二次侧电压μs。系统启动时,光伏发电模块和储能模块不工作,负载功率为1 000 W,双开关Buck-Boost变换器工作在Buck模式,负载电压恒定,即Ud=220 V,通过改变负载电阻的大小,调节负载功率。由图11(a)可知,系统动态调节时间为0.15 s,三相全桥逆变器工作在整流模式,稳定运行的母线电压Udc为350 V,电网侧功率因数为单位功率因数,动稳态性能良好。 图11 并网模式的仿真结果(1) 当t=0.4 s时,光伏发电模块开始工作,并工作在MPPT模式,外界条件设置为:温度T=25℃,光强S=600 W/m2,仿真结果如图11(b)所示,Ppv为单组光伏阵列输出功率,Upv为单组光伏阵列输出电压,光伏发电模块发出总功率约为5 000 W,负载功率不变,三相逆变器由整流模式转变为逆变模式,直流母线电压Udc经过0.1 s的暂态过程仍恒定为350 V,并以单位功率因数向电网输送功率约为4 000 W。 当t=0.8 s时,负载功率增加为2 000 W,光伏发电模块输出功率不变,仿真结果如图12(a)所示,逆变器向电网输送功率减为3 000 W,单相并网电流i2峰值由17.14 A降为12.85 A。 图12 并网模式的仿真结果(2) 当t=1.2 s时,负载功率为2 000 W,光伏发电模块输出功率仍为5 000 W,蓄电池组模块开始工作,双向DC/DC变换器工作在Buck模式,基于蓄电池SOC的充电电流ib为10 A,变换器输出电压约为130 V,逆变器向电网输送功率减为1 700 W左右。 整个过程,直流母线稳态电压在并网控制器的控制下始终为350 V,动态过程短,且超调较小;电网侧功率因数在逆变模式和整流模式始终为单位功率因数;系统能量由双向DC/AC单元来平衡。仿真结果和以上分析验证了光伏微电网控制系统抗扰能力强,动稳态性能好等优点。 4.2 孤岛模式仿真结果 孤岛模式下,双向DC/AC单元停止,微网系统与主电网断开,模拟主电网故障时光伏直流微电网的工作状态。光伏直流微电网启动时的仿真结果如图13(a)所示,启动时光伏发电模块工作在电压下垂模式,启动电压值略低于370 V,本文取365 V;外界温度T=25℃,外界光强S=600 W/m2,单组光伏阵列可输出最大功率约为1 000 W;负载功率为1 000 W,Boost变换器向直流母线输出电流ip=0.55 A。当t=0.4 s时,负载功率增加为3 000 W,此时直流母线电压Udc跌至355 V。以上过程中,负载功率由光伏发电模块提供。 图13 孤岛模式的仿真结果 当t=0.8 s时,负载功率增加到6 000 W,此时Boost工作在MPPT模式,光伏发电模块输出最大功率5 000 W,1 000 W的功率缺额由蓄电池组提供,双向DC/DC变换器工作在Boost模式,并由电压下垂控制器控制蓄电池组输出电流的大小,仿真结果如图13(b)所示。由图可知,Boost变换器输出电流ip由1.7 A增加为2.89 A,蓄电池组输出电流ib=7.1 A,此时母线电压Udc稳定在346.4 V。 当t=1.2 s时,光照强度降低,光伏发电模块最大输出降为4 000 W,负载功率不变,蓄电池组输出功率增加到2 000 W,直流母线电压Udc降为342.8 V,Boost变换器输出电流ip由2.89 A减小到2.33 A,蓄电池组输出电流增加到14.4 A。 当t=1.6 s时,光伏发电模块输出功率为0,模拟夜晚条件光伏电池阵列工作情况,负载功率仍为6 000 W;由于蓄电池组的最大输出电流被限制为20 A,其提供的最大输出功率约为2 400 W,蓄电池组提供不了足够能量,导致母线电压一直跌落,蓄电池组输出电流也一直增大到限定值。如果直流母线电压低于330 V,微电网切断负载,停止工作。 本文以低压微型光伏直流微电网为研究对象,提出了微电网在并网运行和孤岛运行模式下的控制策略。针对光伏直流微电网中各个模块的拓扑结构,建立了相应的状态空间平均模型。详细分析了微电网在并网运行和孤岛运行模式下的控制策略,给出了各个模块在不同模式下可能的工作状态。对模块的工作状态,提出了合理有效的控制策略。基于系统模型分析和控制策略,给出了系统相关硬件参数,搭建了光伏直流微电网Matlab仿真平台,仿真结果验证了所采用控制策略的合理性和可行性。 [1]徐青山.分布式发电与微电网技术[M].北京:人民邮电出版社,2011. [2]张建华,黄伟.微电网运行控制与保护技术[M].北京:中国电力出版社,2010. [3]BOROYEVICH D,CVETKOVII,DONG D,et al.Future electronic power distribution systems–a contemplative view[C]//Proceedings of the 12th International Conference on Optimization of Electrical and Electronic Equipment.Basov,Russia:The 12th International Conference on Optimization of Electrical and Electronic Equipment,2010:1369-1380. [4]张庆海,彭楚武,陈燕东,等.一种微电网多逆变器并联运行控制策略[J].中国电机工程学报,2012,205:72-74. [5]吴为民,何远彬,耿攀,等.直流微电网中的关键技术[J].电工技术学报,2012,27(1):98-106. [6]WANG H,KHAMBADKONE A M,YU X.Control of parallel connected power converters for low voltage microgrid[J].IEEE Transactions on Power electronics,2010,25(12):2971-2980. [7]MAJUMDER R,LEDWICH G,GHOSH A,et al.Droop control of converter-interfaced microsources in rural distributed generation[J].IEEE Transactions on Power Delivery,2010,25(4):2768-2778. Coordinated control strategy for low voltage miniature DC microgrid ZHANG Fu-zhou,YAO Nan,GUO Xue-li,WANG Xiu-pang,LI Ji-hao DC microgrid has advantages of simple structure,reliable operation and low power consumption and could become the main power supply structure for remote mountain villages and future family.The low voltage miniature DC photovoltaic microgrid system with components of solar arrays,batteries and controllable load was studied,and for the island against the system and network operation mode,the master-slave parallel and bus voltage droop control mode were used to achieve the DC micro-grid energy coordination and control.Based on Matlab/Simulink simulation platform and photovoltaic DC micro-grid experimental device,the system was simulated and experimental tested,and the results verify the system energy coordinated control strategy is correct and reasonable. DC microgrid;master-slave parallel control;bus voltage droop control;MPPT TM 615 A 1002-087 X(2016)08-1695-04 2015-08-28 张富洲(1969—),男,河南省人,高级工程师,硕士,主要研究方向为分布式电源的接入与控制。


3 接口变换器控制策略



4 仿真结果


5 结论
(State Grid Nanyang Power Supply Company,Nanyang Henan 473005,China)
