插电式混合动力车型控制策略优化
2016-07-23杨河洲王志红2a2b2a2b赵红宇
杨河洲,王志红,2a,2b,张 飞,2a,2b,赵红宇
插电式混合动力车型控制策略优化
杨河洲1,王志红1,2a,2b,张飞1,2a,2b,赵红宇1
(1.郑州日产汽车有限公司,河南 郑州 450016;2.武汉理工大学 a.现代汽车零部件技术湖北省重点实验室;b.汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
摘要:控制策略对整车燃油经济性起着重要作用,以某辆插电式混合动力汽车(PHEV)为研究对象,对原有的二阶段(CD-CS)控制策略进行了研究。针对该策略存在的问题,进行了控制策略优化设计,并制定了四阶段控制策略。通过仿真软件GT-drive建立整车动力模型并进行仿真分析,结果表明:在行驶里程已知的情况下,四阶段控制策略能够使得荷电状态(SOC)长时间保持在高效区,相比CD-CS控制策略更加节油,每100 km油耗减少了8.2%。实车验证结果表明:优化后的四阶段控制策略同样适用于实车运行。
关键词:插电式混合动力汽车;二阶段控制策略;四阶段控制策略;GT-drive软件
0引言
由于插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)存在两种以上的动力源和多种工作模式,且各个动力源之间又存在复杂的耦合模式,所以必须根据不同的工况对电机和发动机进行合理的能量分配,以达到车辆最佳的动力性能、燃油经济性和排放性能[1-3]。目前,控制策略分为规则控制策略和最优控制策略。规则控制策略因其控制简单,可以很好地嵌入系统而被广泛应用。最优控制策略主要注重于优化建模与求解[4]。
在传统混合动力汽车确定性规则控制策略中,文献[5]按电池荷电状态(state of charge,SOC)划分工作区域,在各个工作区域内,分别控制发动机和电机,使其工作点处于最佳工作曲线上。文献[6]基于功率跟随策略将整车划分为9个工作模式,根据当前需求功率、SOC值、车速和负荷等参数来选择合适的车辆工作模式。文献[7]以SOC值为目标,通过设定上下限值,实现发动机单独启动、发动机工作且为电池充电、发动机和电机共同驱动车辆等模式。文献[8]以加速踏板位移和SOC值为变量,制定了串联式混合动力汽车功率跟随控制策略。
插电式混合动力汽车确定性规则控制策略,主要由电量消耗和电量维持两种模式组成[9]。文献[10]提出的插电式混合动力汽车的控制策略采用发动机作为主要动力源,利用电动机和电池进行功率调节,当发动机不能提供所需功率时,电机通过提供剩余功率使系统满足动力性需求。
虽然二阶段控制策略即电量消耗-电量维持(charge depleting-charge sustaining,CD-CS)控制策略,可以很好地实现整车的控制,但无法保证SOC值长时间处于高效区域。本文对插电式混合动力汽车控制策略进行了研究,在CD-CS控制策略的基础上进行了优化设计,可提高整车的燃油经济性。
1CD-CS控制策略
本文研究的插电式混合动力汽车,采用的是目前插电式混合动力汽车常用的并联式混合动力系统,即传统的发动机驱动系统和电机驱动系统。车辆驱动力由发动机和电机供给。小负荷时由电池驱动电动机,单独驱动车轮;当车辆处于加速,大负荷时,发动机联合电动机共同驱动车轮。在行驶过程中发动机可根据情况向蓄电池充电,制动时电动机也可转换为发电机实施制动能量回收。
整车有3种运行模式:纯电动(electric vehicle,EV)模式、混合动力(hybrid electric vehicle,HEV)模式和制动模式。在HEV模式中根据电机的作用又可分为辅助模式和发电模式。

图1 CD-CS控制策略
原车基于规则控制策略,以SOC值和需求转矩为参考值,制定了CD-CS控制策略,该策略由电量消耗和电量维持两个阶段组成,如图1所示。
车辆充电完毕以较高SOC值启动,当需求转矩小于电机最大转矩时,车辆优先工作在纯电动模式,依靠动力电池提供的能量行驶,虽然制动再生的能量会使得SOC值不断波动,但SOC值总体呈下降趋势,该阶段属于电量消耗(charge depleting,CD)阶段;当动力电池SOC值下降到0.25,为了避免SOC值继续下降至危险区域,车辆进入HEV模式,发动机在提供驱动力的同时,给动力电池充电,使得SOC值维持在一定范围内,该阶段属于电量维持(charge sustaining,CS)阶段。
原车制定的CD-CS控制策略主要利用电池电能,尽可能使车辆处于纯电动模式行驶,电机提供大部分能量,发动机在整个工况中仅在少数情况下启动。然而CD-CS控制策略也存在弊端,当实际行驶里程大于纯电动里程时,车辆很早地进入CS阶段,动力电池长时间处于低SOC值状态。磷酸铁锂电池充放电效率会随着SOC值的下降而下降,长时间工作在过低SOC值,会大大影响电池寿命。
2四阶段控制策略
针对CD-CS控制策略存在的弊端,对四阶段(four-state)控制策略进行了研究。四阶段控制策略是在CD-CS策略的基础上进行的改进,目的是保证车辆在行驶里程内,动力电池长时间处于高效区域并且在行程结束时SOC值处于低值下限,尽可能地利用电能。
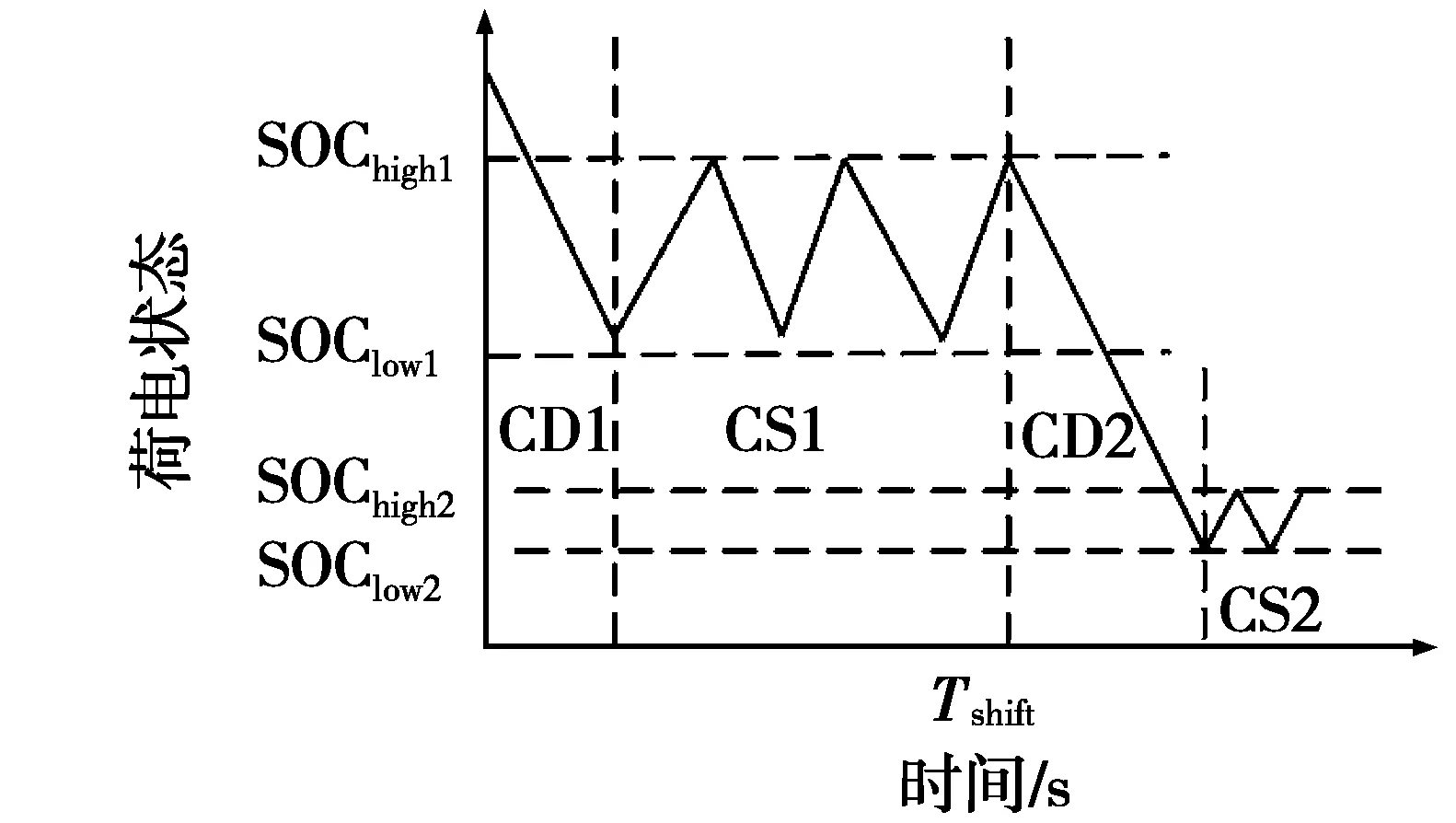
图2 四阶段控制策略
图2为四阶段控制策略。四阶段控制策略由4个阶段组成:CD1、CS1、CD2、CS2。与原车CD-CS控制策略相比,增加了1个CD-CS阶段。
车辆同样以高SOC值启动,优先进入纯电动模式行驶,此时为CD1阶段,电量不断消耗,SOC值降至SOClow1。进入CS1阶段,电量维持在SOClow1与SOChigh1之间,动力电池保持在高效充放电状态。当车辆运行至Tshift时,系统检测到车辆可以靠当前电量以纯电动模式跑完剩下行程时,车辆进入CD2阶段。在CD2阶段之后预留1个CS2阶段,当实际里程大于预估里程时,车辆保证行驶结束时SOC值尽可能低。
在行驶工况已知的情况下,确定CS1至CD2的切换点Tshift是四阶段控制策略研究的重点。系统需要根据当前行驶工况对纯电动续驶里程进行计算。目前对纯电动续驶里程的研究多数是根据能量守恒原则,即车辆能量源输出的能量与行驶消耗的能量相等,从而对续驶里程进行估算[11]。
所选择的电池模型中电池电压随SOC值线性下降,电池的剩余能量为:

(1)
Q=△SOC×C,
(2)
其中:Wb为电池的剩余能量,kWh;Vt为t时刻电池电压,V;Vd为终止时刻电池电压,V;Q为t时刻剩余电量,Ah;C为电池额定容量,Ah;△SOC为从t时刻开始至行程结束SOC变化量。
由汽车行驶理论可知,行驶的车辆消耗功率P为:
(3)
其中:G为汽车重力,N;va为车速,km/h;f为摩擦因数;i为坡度因数;A为迎风面积,m2;CD为空气阻力因数;∂为汽车质量换算因数。
所研究的四阶段控制策略是建立在行驶工况已知的情况下,以1个新的欧洲循环工况(new European driving cycle,NEDC)为例,车辆循环工况需求功率见图3。由图3可知在1个工作循环内,任意时刻车辆所需要的瞬时功率P。

图3 车辆循环工况需求功率图
车辆从t1时刻~t2时刻所需要的能量Wv可以通过对该时间段的功率进行积分得到:

(4)
其中:t为时间,s;Wv为电池在一定时间段消耗的能量,kWh。
利用车辆能量源输出的能量与行驶消耗的能量相等的原则,建立等式:
Wb=Wv。
(5)
为了更好地利用电能,控制策略尽可能地使得行程结束时,电量低至最低限值,因此在计算Tshift时,t2根据循环工况得到,t1即为Tshift。
3仿真分析

图4 CD-CS控制策略与四阶段控制策略 荷电状态变化图
为了更好地比较CD-CS控制策略与四阶段控制策略对燃油经济性的影响,利用仿真软件GT-drive建立整车仿真模型。
图4为CD-CS控制策略与四阶段控制策略的SOC变化图。由图4可知:在不同的控制策略下SOC值以不同的趋势变化,当行驶里程大于纯电动行驶里程时,CD-CS控制策略下,动力电池长时间处于SOC值过低状态,而四阶段控制策略中动力电池在行驶的中间过程,SOC处于较高值状态。将两者20个NEDC循环的油耗进行对比可知:在四阶段控制策略下,燃油经济性得到一定提高,每100 km油耗相较CD-CS控制策略,减少了8.2%。
4样车试验
仿真结果表明:制定的四阶段控制策略具有良好的燃油经济性,但样车实际工作情况是否和仿真结果吻合,所制定的控制策略能否为样车的开发提供理论依据,这些都需要进行实车的验证。由于目前仅为初期阶段的研究,样车为性能样车,因此,实车的验证仅仅在轮毂试验台上进行燃油经济性测定。
参照GB/T 19233—2008《轻型汽车燃油消耗量试验方法》[12]进行试验,试验车辆应行驶3 000~15 000 km。试验前,车辆置于温度为20~30 ℃的室内进行处理,处理期至少为6 h,直到发动机的轮滑油和冷却液温度达到室温的±2 K范围内。试验过程中,按照试验循环工况设置换挡、加速和制动等程序,尽可能地与实际工况相吻合。
燃油消耗试验工况如图5所示。1个完整的循环工况历时1 184 s,由4个市区运行循环和1个市郊运行循环组成。市区循环工况总行程11 km,最高车速50 km/h,平均车速19 km/h,适用于市区内的车辆行驶情况。市郊工况每个循环为400 s,最高车速120 km/h,平均车速63 km/h。

图5 燃油消耗试验工况图
在排气取样方法上,采用的是1978年欧洲经济委员会采用的定容取样法。这是一种接近于汽车排气扩散到大气中实际状态的取样方法,又称为变稀薄度取样法。它是将排气与稀释气体相混合,再以固定不变的容积流量输入分析系统,用以测定排气成分的真实溶度。
为了与仿真结果更好地进行比较,底盘测功机油耗试验同样采用20个循环。在CD-CS控制策略下,样车测试结果为每100 km耗油6.22 L。在四阶段控制策略下,样车测试结果每100 km耗油5.80 L。
5结束语
在行驶工况已知的情况下,制定的四阶段控制策略比原有的CD-CS控制策略节油8.2%。制定的四阶段控制策略同样适用于实车运行,实现了良好的燃油经济性,可为后续的开发提供理论基础。车辆在实际运行过程中,行驶工况往往是未知的,如何将四阶段控制策略与未知路况联系起来是接下来的研究方向。
参考文献:
[1]张博.可外接充电混合动力汽车能量管理策略研究[D].长春:吉林大学,2009.
[2]李训明,曲金玉,刘林,等. 液压混合动力汽车燃油经济性最优控制策略[J].河南科技大学学报(自然科学版),2014,35(5):24-28.
[3]杨忠凯,廖连莹,左言言,等.混合动力汽车动力耦合行星齿轮系动力学模态[J].河南科技大学学报(自然科学版),2015,36(2):14-17.
[4]谢海明,黄勇,王静,等.插电式混合动力汽车能量管理策略综述[J].重庆理工大学学报(自然科学版),2015,29(7):1-9.
[5]王庆年,孙树韬,曾小华,等.并联混合动力客车广义最优工作曲线控制研究[J].汽车工程,2008,30(5):391-394.
[6]左义和,项昌乐,闫清东.基于功率跟随的混联混合动力汽车控制策略[J].农业机械学报,2009,40(12):23-29.
[7]彭武,张俊智,卢青春.混合动力电动公共汽车控制策略的仿真[J].公路交通科技,2003,20(1):148-150.
[8]JALIL N,KHEIR N A,SALMAN M.Rule-based energy management strategy for a series hybrid vehicle[C]//Proceedings of the American Control Conference.1997,1:689-693.
[9]GONDER J,MARKEL T.Energy management strategies for plug-in hybrid electric vehicles[J].SAE world congress,2007,6(11):5656-5675.
[10]CHENG Y,CONG L,CUI S,et al.The study of the operation modes and control strategies of an advanced electromechanical converter for automobiles[J].IEEE transactions on magnetic,2007,11(3):101-103.
[11]周斌.纯电动汽车动力电池SOC与续驶里程估算研究[D].合肥:合肥工业大学,2014.
[12]中华人民共和国国家质量监督检验检疫总局.轻型汽车燃油消耗量试验方法:GB/T 19233—2008[S].北京:中国标准出版社,2008.
基金项目:河南省重大专项基金项目(151100210200)
作者简介:杨河洲(1970-),男,河南温县人,高级工程师,硕士,硕士生导师,主要研究方向为整车设计与集成.
收稿日期:2016-03-14
文章编号:1672-6871(2016)05-0025-04
DOI:10.15926/j.cnki.issn1672-6871.2016.05.006
中图分类号:U469.72
文献标志码:A
