基于空泡压力的水下航行体深度测量系统设计
2016-07-22解春雷祝树生詹景坤王小辉仇公望中国运载火箭技术研究院研发中心北京100076
解春雷,祝树生,詹景坤,王小辉,仇公望(中国运载火箭技术研究院研发中心,北京,100076)
基于空泡压力的水下航行体深度测量系统设计
解春雷,祝树生,詹景坤,王小辉,仇公望
(中国运载火箭技术研究院研发中心,北京,100076)
摘要:实时获取准确的深度信息对水下航行体的机动控制至关重要,传统的捷联式导航解算得到的深度信息受惯性器件的累计误差影响较大。本文开展了基于空泡压力的水下航行体深度测量方法技术研究,建立了一套基于“空泡内静压+动压+空化数”的深度测量方法,并完成了一套样机测量系统的设计,最后通过水池模拟试验来进行验证,为带空泡高速航行体走向应用提供了新的思路。
关键词:水下航行体;空泡;深度测量;测量系统
0 引言
空泡是一种物理现象,是液体中空化现象的一种表现形式。根据流体动力学的伯努利定律中“流速越快,流体产生的压力越小”这个概念,即当航行体在水下以超过100节的高速运动时,液体压力等于水蒸气压力时,其周围因水压力的变化而使水相变为气相,从而产生覆盖了部分航行体或全部表面的超空泡。在空泡包裹下行驶的航行器因为没有直接接触水,降低了产生的勃性阻力的可能性,使得其在水中的阻力减少一个数量级,是水下航行体减阻的革命性方法。
从现阶段对空泡技术的认识分析,影响空泡技术走向未来应用的关键在于突破带空泡航行体机动控制等关键技术。深度的控制对水下航行体的机动控制至关重要,是保证空泡流型稳定和水冲压发动机正常工作的关键因素。而实现深度控制的前提是获取准确的深度信息,水下航行体的深度信息可以通过捷联惯组对线加速度的测量后经导航解算来获得。但是由于空间的局限,水下航行体多采用体积小、精度低的MEMS器件,在长航时或远距离投送状态下,经计算机计算出的深度信息受惯性器件的累计误差影响较大。
因此带空泡水下航行体需要采用一种准确的深度测量方法,基于压力的深度测量方法就成为了实现深度控制的另一种可尝试的技术途径。本文采用工程计算方法,建立了一套基于“空泡内静压+动压+空化数”的深度测量方法,完成了一套样机测量系统的设计,最后通过水池模拟试验来进行验证。
1 基于空泡压力的深度测量原理
水下航行体高速运动时产生轴对称的空泡,空泡尾部以回射流的形式闭合在航行体上,空泡示意图见图1。空泡尾部封闭区域的流体保持层流状态,因此称之为层流封闭空泡模型,当绕空泡面运动的流体绕过空泡尾部冲击物体表面时,在物体表面上就会产生超压。由于物体以变速形式向水面高速运动,空泡位置在物体表面上是变化的。

图1 水下航行体空泡示意图
对于低速水下航行体而言,深度控制依赖以水压测定原理的深度传感器直接提供的深度数据。而带空泡水下航行体的特别之处在于航行体被空泡包裹,深度信息不能直接由传感器来获得,只能采用间接测量的方法。
则可以得到环境压力与水下航行体的动压之间的关系如下:


结合上述二式,可以得到:

此外,由于水下航行体的巡航速度有设计的额定值,因此,在水下航行体推阻平衡的状态下,可以通过空化器前端进水孔内总压的波动估计环境压力的变化,进而对航行深度的变化有所掌握,这也是在水下航行体研究性试验中,对惯组解算出的深度信息进行有效性评估的一种非常有效而实用的方法。
2 系统方案设计
2.1方案概述
由于水下航行环境的特殊性,电磁波信号在水介质中会快速的衰减,传输距离较短,无法有效的将测试数据传输到地面设备。而带空泡航行体在水下航行过程中,其表面包裹着空泡,从而在航行体与水介质间形成了空气截面,声纳信号也无法较好的传输出去,同样无法有效的将测试数据传输到地面设备。因此无线电遥测体制、声纳测量体制均无法适用带空泡航行体的遥测信息传输。
本文采用“回收式测量系统”作为带空泡航行体的测量方案。回收式测量系统采用固态存储器作为测量数据的记录方式。通过在航行体各个舱段布置传感器及变换器进行压力、速度等参数的测量,通过固态存储器存储大量的测量数据,在试验结束后,通过打捞回收航行体及固态存储设备,读取回收试验测量数据。
测量系统基本组成框图如图2所示。
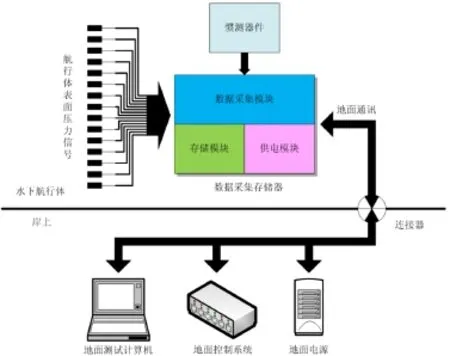
图2 测量系统组成框图
从图中可以看出,测量系统主要包含压力传感器、惯性测量器件、数据采集存储器(包含数据采集模块、存储模块、供电模块)、地面测试计算机、地面控制系统、地面电源等。
2.2压力传感器
水下航行体的内部空间较小,且在高速航行中航行体表面覆盖空泡,空泡内的压力随着航行中空泡的产生和溃灭进行高速的变化,航行体表面测量介质也在水、气及水气混合物间不断变换。
因此对压力传感器的要求主要如下:
1)结构尺寸要微小;
2)能适应水、气及水气混合物等多相流界面;
3)压力传感器的动态范围要求不小于1kHz。
本方案采用硅压阻式压力传感器完成空泡内压力的测量。压力传感器采用敏感元件背面承压的工作模式,由硅片作为测量元件直接接触被测介质,当硅片受压力形变时集成在硅片内部的惠斯顿电桥产生相应的不平衡输出,输出的信号经信号处理电路转换成要求的电压信号。
图3所示为背底承压结构示意图。
图4为由惠斯顿电桥组成的压阻式传感器,如无压力变化,其输出为零。
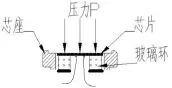
图3 背底承压结构示意图

图4 惠斯顿电桥电路原理

图5 数据采集存储器原理示意图
压力传感器的主要技术指标要求如表1所示。

表1 压力传感器性能指标
2.3数据采集存储器
数据采集存储器为测量系统信息采集和处理的核心,主要包含数据采集模块、存储模块、供电模块等部分,原理示意图如图5所示。
数据采集系统的输入端对表面压力信号进行放大调理到05V,对时序电路进行隔离跟随处理。把输入信号送往的模拟开关,运放分压跟随送到ADC,在FPGA的控制下进行采集。将输入信号按采样要求有序的输入给同一个AD进行采集,并设置一定的帧格式存储在同一片2G字节容量的Flash中,各路数据以帧格式为参考由应用软件分别提取、绘图。记录器采用充电电池供电,模拟开关切换时间最快为30ns,AD采集最大为40M-MSPS。
1)数据采集模块
数据采集模块的功能是对航行体各压力传感器输出进行信号调理及放大,对放大后的信号进行采集和编码,并完成与地面测试计算机的通信。
压力传感器输出0~100mV的弱电压信号,经压力变换器调理成0~5V的电压信号,送至数据采集模块进行数据采集。
2)存储模块
回收式测量系统将所有测量数据存储于装在航行器上的固态存储器上,试验结束后通过打捞回收进行数据获取。固态存储器采用掉电不丢失的FLASH存储芯片,存储容量为2G,存储器设置为16个分区。存储器每次启动后,只对空的存储区间进行数据存储操作,以避免有效数据被覆盖。
3)供电模块
电池采用锂离子电池对测量系统的设备进行供电,锂离子电池具有可重复性充放电、操作简单等优点。供电模块提供MEMS惯性测量器件的+5V电压供电,提供压力传感器的1.5mA恒流源供电。
3 模拟试验及结果分析
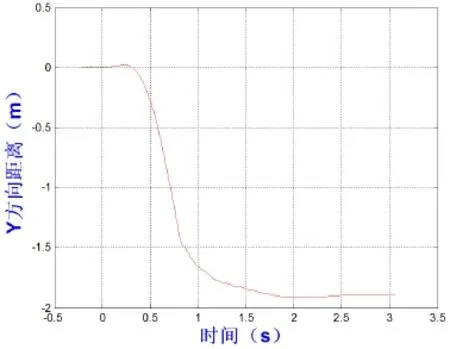
图6 惯性器件测试的航行体深度数据
为了验证基于空泡压力的水下航行体深度测量方法的有效性,本文开展了模拟测试试验,获取试验模型的相关运动参数、压力参数等数据。
通过对惯性器件数据的零位漂移误差、耦合误差进行补偿,对高频振动噪声进行滤波,得到的深度方向的惯性器件测量结果,通过工程计算得到基于惯性测量器件测试的航行体深度数据,如图6所示。
通过对压力数据的噪声进行滤波,得到航行中空泡内压力测量结果,如图7所示。

图7 空泡内压力测量结果
试验数据取0.6s~0.7s内开展计算,此时航行体轴向速度约为40m/s、航行体空泡内压力均值为=110kPa。试验模型的空化数设计值为0.024,可以得到带空泡航行体的环境总压为:


此次模拟测试试验中测试时间约1s,因此MEMS惯性测量器件的零位漂移误差较小,惯性测量精度可以保障。由图6中MEMS惯性测量器件解算出的航行体深度信息可以看出,在0.6s~0.7s内,航行体深度方向下降了约1.3m,而航行体起始位置深度为1.7m,因此其解算的航行体深度约为3m。
可以看出,通过基于空泡内压力的工程计算所得航行体深度与MEMS惯组所测的航行体深度基本相同。
4 结束语
实时获取准确的深度信息对水下航行体的机动控制至关重要,传统的捷联式导航解算得到的深度信息受惯性器件的累计误差影响较大。本文从水下航行体的空泡内静压与动压关系出发,通过压力建立了一套基于“空泡内静压+动压+空化数”的深度测量方法,对航行体惯性器件解算出的深度信息进行有效的补
充,研制了测量样机系统,通过水池模拟测试试验测量方法进行了验证,为带空泡高速航行体走向应用提供了新的思路。
参考文献
[1] 王献孚.空化泡和超空化泡流动理论及应用.国防工业出版社. 2009.
[2] 张瑾.超空泡形态参数的测量及参数可视化研究. 硕士论文.西北工业大学. 2012
[3] 曹伟,魏英杰,王聪,邹振祝,黄文虎.超空泡技术现状、问题与应用.力学进展.2006, 36(4):571-579.
[4] M.Wosnic,T.Schauer,R.Arndt.Experimental Study of a Ventilated Supercavitating Vehicle.Fifth International Symposium on citation.Osaka,Japan.2003, Cav03-OS-7-008.
[5] 白涛, 毕晓君.水下超空泡航行体纵向机动运动控制研究.哈尔滨工程大学学报. 2011(4): 445-450.
[6] Michel J M.Introduction to cavitation and supercavitation. VKI Special Course on Supercavitating Flows. 2001:RTO-EN-010.
[7] 姜国兴,刘煜禹.方兴未艾的水下通信技术.中国水运. 2007(6):105-106.
[8] 管振辉.嵌入式高速固态存储器的设计.舰船电子对抗. 2013(2):97-99.
[9] 于家福,王星来,李兵,邹其利,唐贵.水介质动态压力传感器设计与实现. 遥测遥控. 2014(3):53-57.
Design of underwater vehicle depth measure system based on pressure of vacuole
Xie Chunlei,Zhu Shusheng,Zhan Jingkun,Wang Xiaohui,Qiu Gongwang
(R&D Center, China Academy of Launch Vehicle Technology,Beijing,100076)
Abstract:Real-time measuring accurate depth data is very important to mobile control of underwater vehicle,traditional strap-down navigation solution measuring depth data is influence by accumulated error of inertial equipment.This paper take research on underwater vehicle depth measure method based on pressure of vacuole,found an depth measure method based on“static pressure in vacuole + dynamic pressure + cavitation number”,and completed a set of prototype measure system, and pass the verification by cistern simulated test,provide new ideas for apllication of vehicle with vacuole.
Keywords:Underwater vehicle;Vacuole;Depth measure;Measure system
作者简介
解春雷(1984-),男,汉族,安徽人,硕士,哈尔滨工业大学毕业,工程师,主要研究方向为:飞行器电气系统总体设计。
