道路空-地图像探测控制器可靠性增长设计
2016-07-22张晨胡永红
张晨, 胡永红
(西北工业大学, 陕西 西安 710072)
道路空-地图像探测控制器可靠性增长设计
张晨, 胡永红
(西北工业大学, 陕西 西安710072)
摘要:可靠性历来是航空航天领域关注的焦点之一,可靠性增长是产品设计过程中不断完善的迭代过程,但大多工作都局限于概念或顶层框架的研究,未涉及具体工程实现。以道路空——地图像探测控制器可靠性增长设计为背景,提出了一种基于电路优化的可靠性增长综合设计方法。通过分析控制器硬件电路结构,建立了可靠性结构模型与数学模型,根据模型分析结论对控制器基本可靠度较低的D/A结构驱动电路进行了优化,设计了一种基于动态可编程电压比较器的新型驱动电路。通过可靠性评估,优化后控制器的基本可靠性理论上增长了33.2%。进一步的环境应力筛选等可靠性验证试验表明:通过可靠性增长设计后,控制器不仅满足了系统功能与性能指标及可靠性要求,而且体积、重量、成本等综合性能也得到了提高。
关键词:控制器;可靠性;可靠性增长分析;可靠性验证
与地-地图像探测相比,空-地图像探测具有探测范围广、无需考虑地面遮挡、响应速度快、探测结果准确性高的优势。而安装在道路探测型无人机上的图像探测控制器担负着控制图像探测设备的各种功能,不仅保证地面道路情况准确采集,同时还能保障有效资源的合理利用,所以道路空-地图像探测控制器在无人机系统中具有非常重要的地位。由于该型无人机总重不超过10 kg,因此控制器的体积要求不超过65 mm×85 mm×20 mm。目前用于无人机机载的同类产品虽能满足功能需求,但体积重量与可靠性不满足要求,因此必须对其进行可靠性增长设计[1]以满足小型化与高可靠性指标要求。
小型化设计并非简单的功能集成与减小体积重量,其关键技术是确保完成各项功能与性能指标的前提下提高控制器的可靠性。
1控制器电路结构
根据控制器可靠性建模流程,首先对控制器电路结构进行分析。
如图1所示,控制器共分为4个单元,分别是CPU单元、驱动单元、电平转换单元和供电单元。其中CPU单元的作用是接收外部指令,译码后发出数字电平控制量;驱动单元的功能是将CPU单元发出的控制量转换成控制对象可以识别的控制电压;电平转换单元将外部的标准RS232电平转换为CPU可识别的TTL电平;供电单元将机载+12 V电压转换为各单元所需电压。
控制器具体工作过程为外部控制指令经过电平转换单元的转换后进入CPU单元,完成译码后发出控制电平,经驱动后对被控对摄像机电源、焦距、光圈、镜头,照相机电源、快门和机载天线与功率放大器等进行控制。
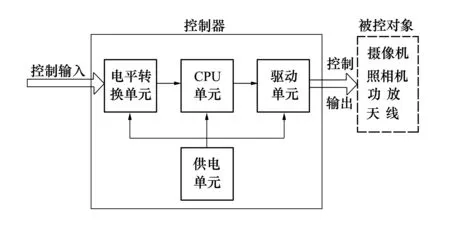
图1 控制器电路结构
2控制器可靠性建模
针对控制器电路结构,下面建立控制可靠性结构模型和数学模型。
2.1控制器串联模型
上述电路结构与工作过程表明,虽然控制器各单元相互独立,但其工作过程是紧密相连的,而且控制器各功能模块不存在冗余设计,即其中任一单元出现故障时控制器均不能正常工作,显然可靠性模型属于串联模型。
结合图1与串联模型定义,控制器可靠性结构模型为串联模型,如图2所示。

图2 控制器串联模型结构图
2.2数学模型
根据可靠性理论串联模型其对应数学模型为
(1)
式中:Rs(t)为系统可靠度;Ri(t)为单元可靠度;n为组成系统的单元数。
由图2可知,控制器由4个单元组成,所以n=4,即道路空-地图像探测控制器的可靠性数学模型为
(2)
根据控制器的工作过程,当控制器上电工作时,各个单元同时启动工作,每个单元工作时间与控制器整体工作时间相同,且每个单元的工作寿命服从指数分布,因此控制器可靠性数学模型可表示为
(3)

根据(2)式分析可得,控制器可靠度为各个单元可靠度的乘积,系统可靠性与串联单元数量多少有关,即串联单元数越多,可靠度越低。也就是要么减少单元数量提高控制器可靠度,要么提高各单元可靠度从而提高控制器可靠度。这样必须对控制器各单元电路进行详细分析,寻求一种适合于控制器可靠性增长设计的方法。
3控制器可靠性增长设计
3.1可靠性增长设计分析
根据电路结构与结构模型,需在控制器4个单元中找出具有优化空间的单元电路进行可靠性增长设计。对4个单元电路分析如下:
·电平转换单元:只有一个ADM202E电平转换芯片与其外围适配电路,没有优化空间;
·CPU单元:该单元是基于8051单片机最小应用系统[2]实现的,为最简单的电路组成,没有优化空间;
·供电单元:第一级线性稳压模块LM7805将机载+12V转换为+5V电压,第二级模块TSH0512D将稳定+5 V电压转换为±12 V电压,没有优化空间;
·驱动单元电路:芯片数量多,占用控制器体积重量比例较大,以控制Zoom驱动电路为例,如图3a)所示,驱动单元具有优化空间,可进行可靠性增长设计。
显然,采用减少控制器单元数量的方法是不可行的。在其余3个单元可靠度无法提高的情况下,只能通过提高驱动单元可靠度提高系统整体可靠性[3],也就是对驱动单元电路进行优化。
3.2驱动单元电路优化设计
图3a)所示,为现有产品Zoom驱动单元电路,图中Ra=Rb=15 k,Rc=7.5 k。当单片机收到控制Zoom指令时,通过P0口给D/A的数据线D0~D7写入数字量进行D/A转换:当给地址0XXXH(P2.7)写入FFH时,Vo输出为+5 V(Zoom out);写入7FH时,Vo输出为0 V(Zoom stop);写入00H时,Vo输出为-5 V(Zoom in)。
图3a)中,实现摄像机一种控制功能的驱动电路用了1片D/A,2个运算放大器,那么,3种控制功能共需要3片D/A,6个运算放大器,即2片四运放。
通过查阅摄像机使用说明书发现,摄像机控制量仅为-5 V、0 V 、+5 V 3种状态电压,无中间线性电压变化。所以应用D/A转换器实现,显然浪费资源,为此考虑采用一种数字开关量实现3种功能三态控制的转换方法。

图3 Zoom驱动电路原理图
由于运算放大器搭建的电压比较器的重要用途之一就是作为模拟电路与数字电路的匹配电路,因此优化方法拟采用电压比较器实现这一功能。
单片机输出控制电平只有H/L 2种形式(+5 V、0 V),所以无论哪种电平作为基准电压,都只能输出2种控制信号,不能实现针对摄像机一种功能的三态控制,因此,可以把电压比较器的基准电压设计为动态变化的电压,即利用单片机的I/O口输出的高/低(H/L)电平对基准电压进行编程,从而实现对基准电压的变化控制。具体设计思路如图3b)所示,图中R1=R2=R3=R4=10 k。
将图3b)中各电阻值代入电压比较器输入/输出电压之间的关系式(4)中
(4)
得输入/输出电压关系如表1所示。

表1 输入/输出电压比较关系
进一步对图3b)中电路进行仿真,用仿真示波器观察输入/输出电压结果如图4所示。
图4中,通道1、2分别为Va、Vb,其中Va输入的激励电压为0 V、0 V、+5 V、+5 V(对应电平为L、L、H、H)的周期信号;Vb输入的激励电压为0 V、+5 V、0 V、+5 V(对应电平为L、H、L、H)的周期信号;通道4为Vo,其结果为0 V、+5 V、-5 V、0V。
对比表1与图4,二者完全拟合。也就是比较器输入选择适合Zoom需要的三态控制量即可满足要求。这样,用单片机的2个I/O端口对比较器输入端Va、Vb进行编程:分别输出00H、01H、10H 3种状态,即可得到0 V、+5 V、-5 V的3种电压控制量。
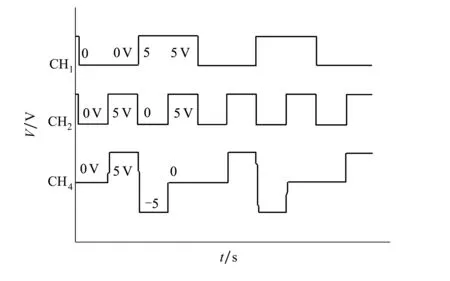
图4 动态可编程电压比较器仿真结果
显然,优化后的可编程电压比较器驱动电路完全能够满足摄像机Zoom的三态电压控制要求,那么摄像机其他功能Focus(焦距)和Aperture(光圈)的驱动均可采用此电路实现。
4可靠性评估与验证
4.1可靠性增长设计评估
比较驱动电路优化前图3a)和优化后图3b),在芯片数量上,1路控制功能减少了1片D/A转换芯片,3路控制功能则减少了3片D/A转换芯片,同时电路结构也得到了简化,为印制电路板节省了体积空间,满足了控制器体积设计要求。
由于是对道路空-地图像探测控制器进行改进设计,所以只能采用元器件计数法对2种驱动电路的可靠性进行分析比较,依据可靠性理论,基本可靠性表示为
(5)
式中:MTBF为系统的平均无故障时间[4]
(6)
式中:λGS为系统的总失效率;λGi为第i种元器件的通用失效率;πQi为第i种元器件的通用质量系数;Ni为第i种元器件的数量;n为设备所用元器件的种类数目。
从(5)式与(6)式可以看出,元器件数量越少,系统的总失效率越低,可靠性越高,即MTBF越大。
对于图3a)的现有驱动电路而言,由(2)式得
(7)
由此,图3a)中驱动电路的基本可靠性为
(8)
对于图3b)的优化驱动电路而言,由(2)式得
(9)
由此,图3(b)优化后驱动电路的基本可靠性为
(10)
式中:λGS1为图3(a)优化前驱动电路总失效率;λGS2为图3(b)优化后驱动电路总失效率。λG1为D/A芯片的失效率;πQ1为D/A芯片通用质量系数;λG2为线性运算放大器的失效率;πQ2为线性运算放大器通用质量系数;λG3为电阻器的失效率;πQ3为电阻器通用质量系数。
比较(8)式和(10)式,MTBF2大于MTBF1,显然优化后驱动电路可靠性更高。
对于系统整体而言,参照GJB/Z299,将优化前与优化后控制器元器的通用失效率和通用质量系数带入(6)式得:
优化前控制器的总失效率λGS1=29.082/h,平均无故障时间MTBF1=34 386 h;优化前控制器的总失效率λGS2=21.82/h,平均无故障时间MTBF2=45 829 h。
显然,控制器基本可靠性(间MTBF)增长[5-6]了33.2%。
4.2可靠性增长设计验证
根据无人机机载设备可靠性验证要求,优化后控制器进行了环境应力筛选试验。环境应力筛选方法如图5与表2所示。

图5 控制器环境应力筛选试验方法

温度循环时间/min低温停留时间/min高温停留时间/min转换时间/min循环次数240142601910
图5中,在控制器通电至断电的19 min内,选择任意温度节点对控制器的Zoom功能进行测试,每个循环测试1次,进行10个循环的测试,测试结果记录数据如表3。

表3 控制器Zoom功能测试结果记录表
将表3中测试结果与指标进行对比,Zoom输出量完全满足系统指标要求。
5结语
针对道路探测无人机体积小可靠性高的指标要求,论文对现有空-地图像探测控制器进行优化改进。通过分析控制器硬件电路结构,建立了可靠性结构模型与数学模型,根据模型分析,把控制器基本可靠度较低的D/A结构驱动电路改进为动态可编程电压比较驱动电路。经过可靠性评估,改进后控制器基本可靠性理论值增长了33.2%,进一步可靠性试验验证表明:改进后控制器既满足了可靠性指标要求,又减小了体积重量,该方法可推广应用于其他领域的可靠性增长设计中。
参考文献:
[1]刘琦,武小悦. 复杂系统可靠性增长试验评价的集成分析模型[J]. 系统工程理论与实践,2010, 30(8): 1477-1483
Liu Qi, Wu Xiaoyue. Integrated Analysis Model for Reliability Growth Test Evaluation of Complex System[J]. Systems Engineering-Theory & Practice, 2010, 30(8): 1477-1483 (in Chinese)
[2]张毅刚,彭喜元,彭宇. 单片机原理与应用[M]. 北京:高等教育出版社, 2010: 34-37
[3]龚庆祥,赵宇,顾长鸿, 等. 型号可靠性工程手册[M]. 北京:国防工业出版社, 2007: 85
[4]Paul Ellner, Nathan Herbert. On Some Properties of a Reliability Growth Planning Model[C]∥Reliability and Maintainability Symposium(RAMS), Orlando, Florida, 2013: 1-6
[5]Robert T Kaminski. Developing Effective Reliability Growth Strategies for DoD Programs[C]∥Reliability and Maintainability Symposium(RAMS), Orlando, Florida, 2013: 1-5
收稿日期:2015-09-16
基金项目:国家自然科学基金(61134004)资助
作者简介:张晨(1991—),西北工业大学硕士研究生,主要从事信息工程与控制的研究。
中图分类号:TN41, TP33
文献标志码:A
文章编号:1000-2758(2016)03-0399-05
Design of Reliability Growth for Air to Ground Graphic Detecting Controller
Zhang Chen, Hu Yonghong
(Northwestern Polytechnical University, Xi′an 710072, China)
Abstract:The reliability has always been one of the focuses in the field of aeronautics and astronautics, the reliability growth is a continuous improved iterative process during product design, but most of them are confined to the research of concept or top frame, rather than refer to specific engineering implementation. In this paper, an comprehensive reliability growth design method based on circuit optimization was proposed in the light of reliability growth design of road air-to-ground image detecting controller. The reliability structure model and the mathematical model were established through the analysis of the controller hardware circuit structure, then the D/A structure driving circuit with low reliability of the controller was optimized according to the model analysis conclusion, at last a new driving circuit based on dynamic programmable voltage comparator was presented. Through the reliability assessment, the basic reliability of the optimized controller was increased by 33.2% theoretically. Further reliability verification tests, such as environmental stress screening, showed that: the controller, optimized by the reliability growth design, not only met the system function and performance index and reliability requirements, but also had better comprehensive performances, such as volume, weight, cost and so on.
Keywords:controllers; reliability; reliability growth analysis; design of experiments
