多平面锥形针接触建模与影响因素研究
2016-07-21李成刚林家庆申景金谢志红侯小蕾
李成刚 林家庆 申景金 谢志红 崔 文 侯小蕾
1.南京航空航天大学,南京,210016 2.南京邮电大学,南京,210046
多平面锥形针接触建模与影响因素研究
李成刚1林家庆1申景金2谢志红1崔文1侯小蕾1
1.南京航空航天大学,南京,2100162.南京邮电大学,南京,210046
摘要:针对平面锥形针在组织接触变形阶段受力变化难以分析的现状,根据弹性组织与针接触时的变形特点,建立了多平面锥形针的接触模型,并重点探讨了该阶段针的受力与穿刺性能问题。接触模型揭示了在穿刺深度相同的情况下,锥形针的接触受力受组织剪切模量、针形半顶角和针的平面数三个因素共同影响。通过实验对接触模型进行验证,发现实验曲线和理论曲线能够较好地吻合,表明该模型是有效可行的。由研究可得:为减小平面锥形针的接触受力、提高针的穿刺性能,可选择较小剪切模量的组织、减小针形半顶角或减少针的平面数。
关键词:多平面锥形针;接触模型;剪切模量;针形半顶角;针的平面数
0引言
微创穿刺手术是医学领域新兴的一种诊治手段,代表着临床医学发展的新方向。穿刺针作为微创穿刺手术的常用工具,其穿刺性能的好坏决定了微创手术的成败。作为一类常见的穿刺针,平面穿刺针被广泛应用于临床实践中,在活检取样、局部麻醉、血样抽取和药物注射等过程中都起到了重要作用。研究表明,在相同穿刺深度下,针穿刺组织时的受力越小,针的穿刺效率越高,穿刺性能越好[1]。
目前,国内外对针穿刺性能的研究还处于探索阶段。Moore等[2-4]对平面穿刺针的外形进行几何建模分析,得出平面针的外形变化特点,并对针的外形进行改善,设计得到具有良好切削性能的新型穿刺针。文献[5-6]建立了针尖切削刃的通用几何参数模型,对不同针形的切削性能进行了试验分析。上述研究大都集中于针尖几何外形的分析,而缺少穿刺过程中针尖受力与外形参数相关性方面的研究。文献[7-9]对四面对称体的接触问题进行了研究,通过分析穿刺过程中对称体的受力与穿刺深度的变化关系判断穿刺组织的软硬程度,该研究只局限于四面对称体结构。高立营等[10]采用单元刀具综合法构建活检针切削力泛函模型,并定量描述了切削力与针尖几何结构之间的关系,但他们只研究了组织刺破后切削力的变化特点,没有分析接触变形过程中针的受力变化情况。
本文对平面锥形针在接触变形阶段的受力变化进行研究,根据弹性组织与针接触时的变形特点,建立多平面锥形针的弹性接触模型;基于该模型分别从组织剪切模量、针形半顶角和针的平面数三个方面分析接触变形阶段针的受力变化特点;最后通过实验对平面锥形针的受力情况进行验证,并对比分析实验和理论值之间的相对误差,以此验证理论分析的准确性。
1多平面锥形针与弹性组织的相互作用
1.1多平面锥形针介绍
根据不同的几何外形,将平面锥形针分为空心平面锥形针和实心平面锥形针。本文只对带有尖端的实心平面锥形针进行分析,研究多平面锥形针在接触变形阶段的受力变化特点。三平面、四平面和六平面锥形针的几何外形如图1所示。
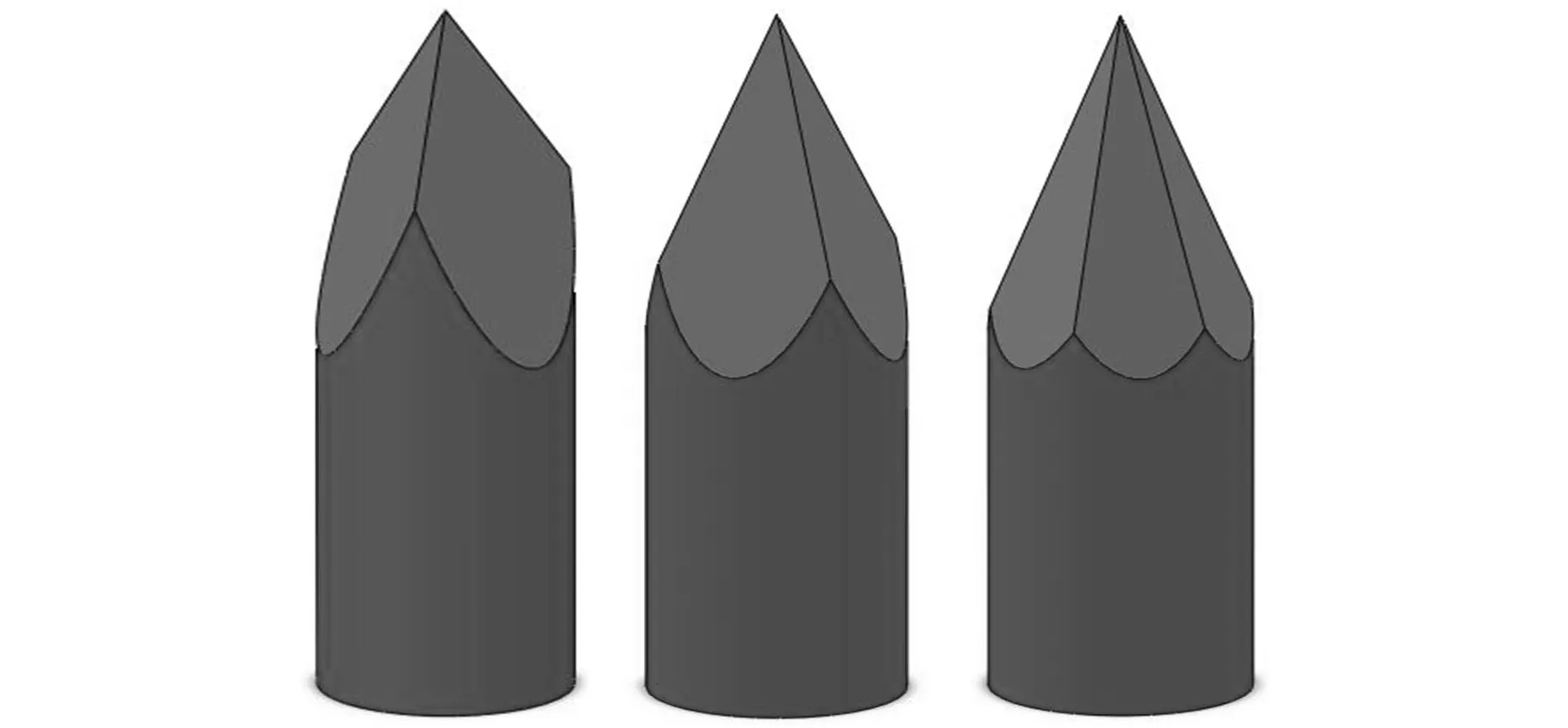
图1 三平面、四平面、六平面锥形针示意图
1.2 针与弹性组织穿刺过程分析
针穿刺组织的过程可以分为三个阶段[11]:未穿刺阶段、接触变形阶段和刺穿后阶段(图2)。在未穿刺阶段,针与组织没有发生接触,此时针没有受到力的作用;在接触变形阶段,针继续穿刺与组织发生接触,由于受到针的接触作用,组织发生变形;当组织受到的接触应力达到临界应力时,针刺破组织进入到组织内部,此为组织刺穿后阶段。
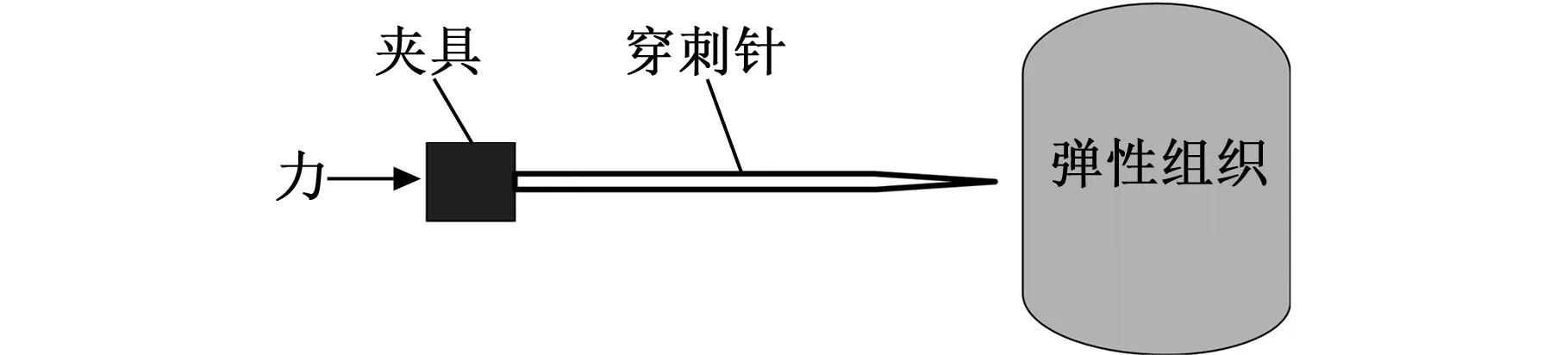
(a)未穿刺组织阶段
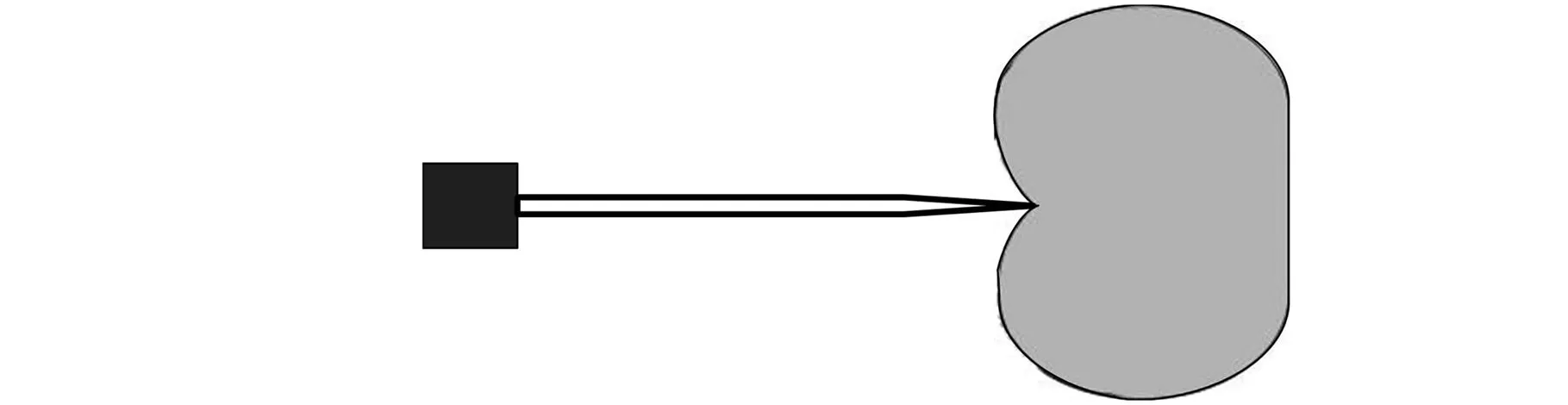
(b)接触变形阶段
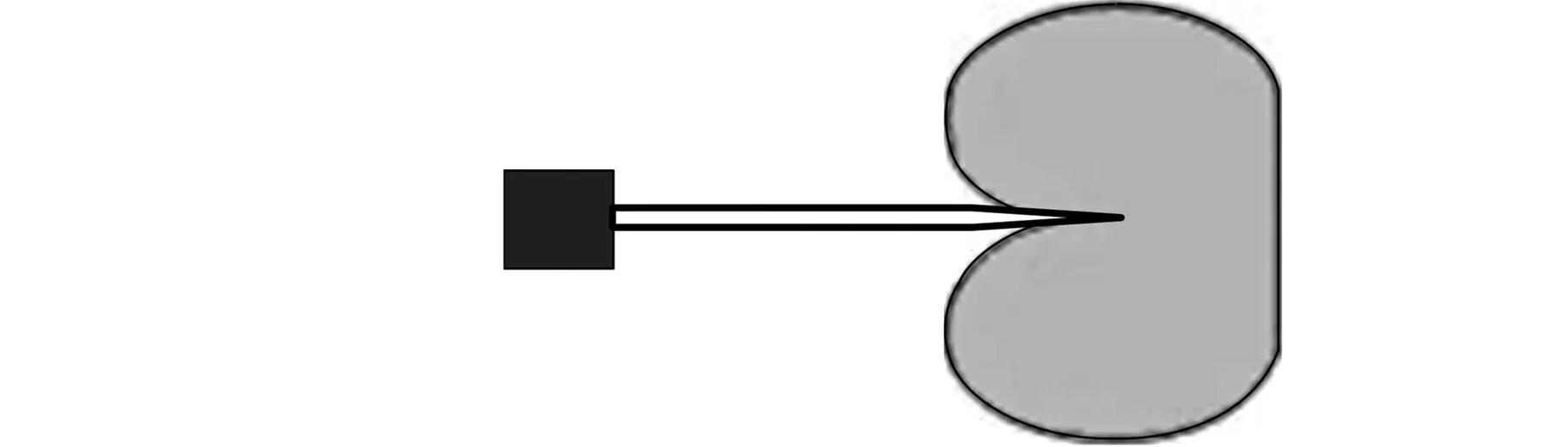
(c)刺穿后阶段图2 针穿刺组织的过程示意图
本文对接触变形阶段中针的受力变化情况进行分析,根据接触过程中弹性组织的变形特点建立多平面针的弹性接触模型。
1.3多平面锥形针与弹性组织的接触变形分析
当多平面锥形针与弹性组织接触时,由于受到针的接触作用,弹性组织发生变形。相对于弹性组织的变形,多平面锥形针的变形可以忽略不计,因而将锥形针视为刚性体进行研究。以四平面锥形针为例,建立空间直角坐标系(图3),把针与弹性组织开始接触时的点作为坐标原点,以针穿刺弹性组织的方向为Z轴负方向,并以坐标原点作垂直于Z轴的平面为XY平面。根据四平面锥形针的外形特点,针与弹性组织发生接触作用,弹性组织变形时的截面外形轮廓是由4条相同的双曲线包围而成的[12]。
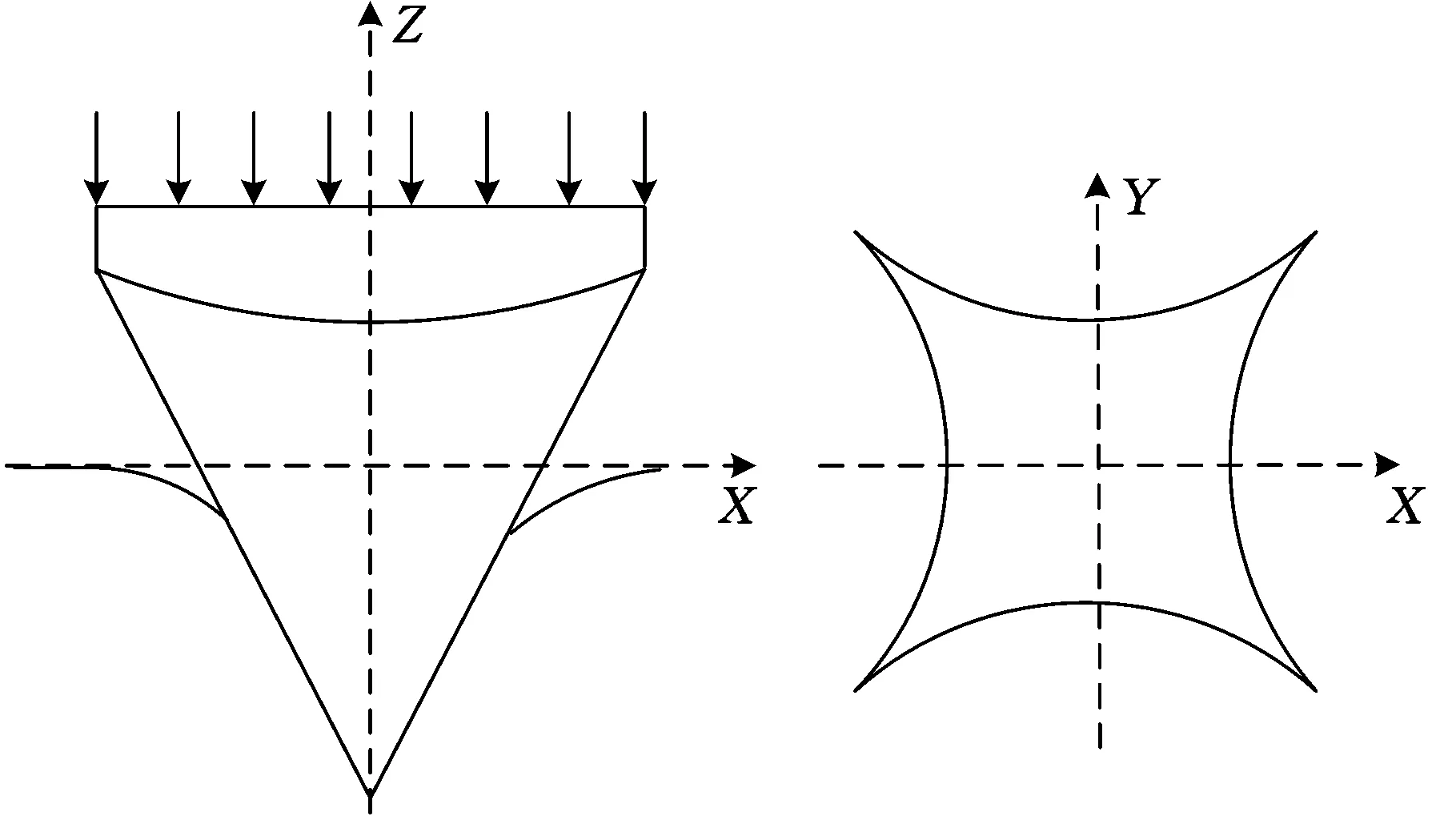
图3 四平面锥形针与组织接触时的正视图与俯视图
由于多平面锥形针的几何外形构造不同,故组织发生变形时的截面外形轮廓也随之发生变化[12],根据四平面锥形针接触组织时截面变形轮廓的特点可得,三平面、六平面对称针接触组织时的截面轮廓分别由3条、6条相同的双曲线包围而成(图4)。
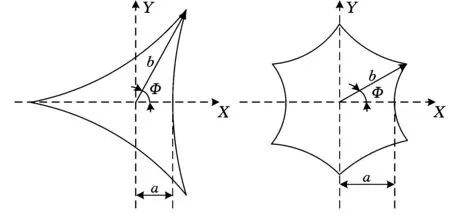
图4 三平面、六平面锥形针接触组织时的截面变形轮廓
图4中,区域夹角Φ为两条双曲线相交点的径向方向与X轴正方向的夹角;a为组织变形截面内原点到双曲线的最小距离;b为变形截面内的原点到双曲线的最大距离。
由图3和图4可知,区域夹角Φ的大小是由平面锥形针的平面数决定的。三平面锥形针的区域夹角Φ=π/3;四平面锥形针的区域夹角Φ=π/4;对于n平面锥形针,其区域夹角Φ=π/n。
由图3和图4中的几何关系可得,组织变形截面内双曲线上任意一点到原点的距离r为
(1)
其中,夹角φ为变形截面内双曲线上任意一点的径向方向与X轴正方向的夹角;e为双曲线的离心率。由图3和图4可得夹角φ的范围为:-Φ≤φ≤Φ。
弹性组织的变形截面轮廓为多条相同的双曲线围成的闭合区域,根据双曲线的几何性质得出离心率e的范围为:e>1/cosΦ。
由式(1)可得变形截面内原点到双曲线的最大距离b为
(2)
2平面锥形针接触建模与分析
2.1弹性接触模型的建立
由图5可知,多平面锥形针的弹性接触模型包含了以下参数:多平面锥形针尖与组织的穿刺深度D;针尖与组织的接触深度h;平面针的成形平面与针轴线的夹角半顶角θ;多平面锥形针受到的法向力F;接触应力在Z方向的分量p。
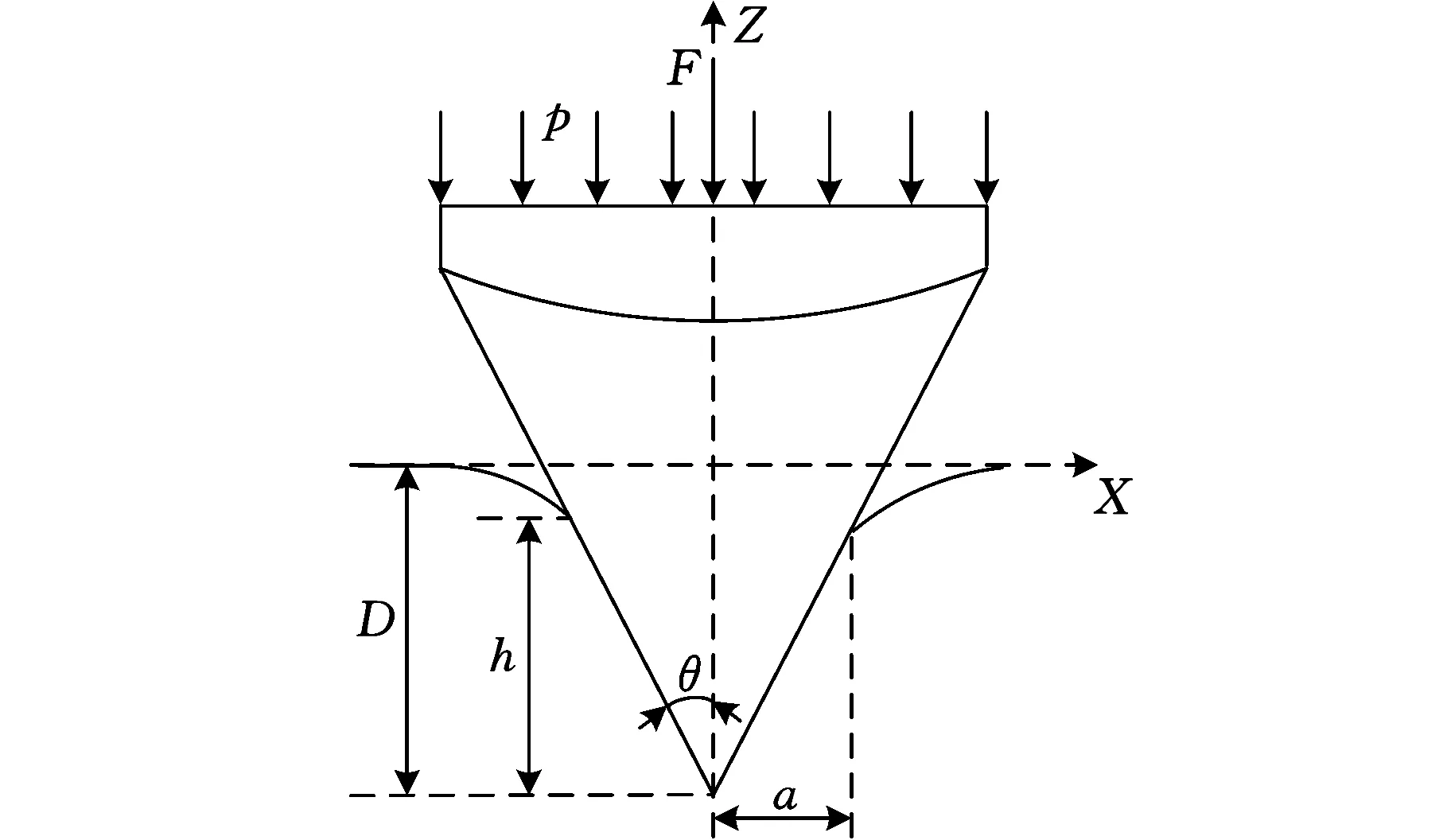
图5 平面锥形针接触弹性组织示意图
由图5所示的几何关系可得
a=htanθ
(3)
在多平面锥形针的弹性接触模型中,针的法向力F为
F=∬ApdA
(4)
式中,A为平面锥形针与组织的接触面积。
根据对称体的平底压头接触问题和棱体压头接触问题[12],假设在平底接触问题中,D*、p*、F*分别为平底穿刺过程中产生的穿刺深度、接触应力在穿刺方向的分量和作用于轴对称体的法向力,在棱体接触问题中,D1、p1、F1分别为棱体穿刺过程中产生的穿刺深度、接触应力在穿刺方向的分量和作用于棱体的法向,则由功的互等定律[13]可得
D*F1=D1F*
(5)
由多平面锥形体的接触问题[14]可得
D1F*=∬Ap*wrdrdφ
(6)
其中,w为渗透函数,其表达式为
(7)
由式(1)、式(2)、式(5)、式(6)和式(7)求解可得作用于多平面锥形针的法向力F为
(8)
(9)
式中,G为组织的剪切模量;υ为组织的泊松比。
最终对式(9)积分求解可得
(10)
将式(10)代入式(8)中得到针的法向力F为
(11)
根据Barber变分条件[15]∂F/∂a=0,∂F/∂e=0可得
(12)
(13)
当平面锥形针与组织发生接触时,组织变形截面内双曲线的弯曲程度随穿刺深度的变化而变化。由于双曲线的离心率在接触模型中不能直观表示,故定义参数κ对模型进行分析。其中,参数κ为变形截面内最小距离a与最大距离b的比值,则得
(14)
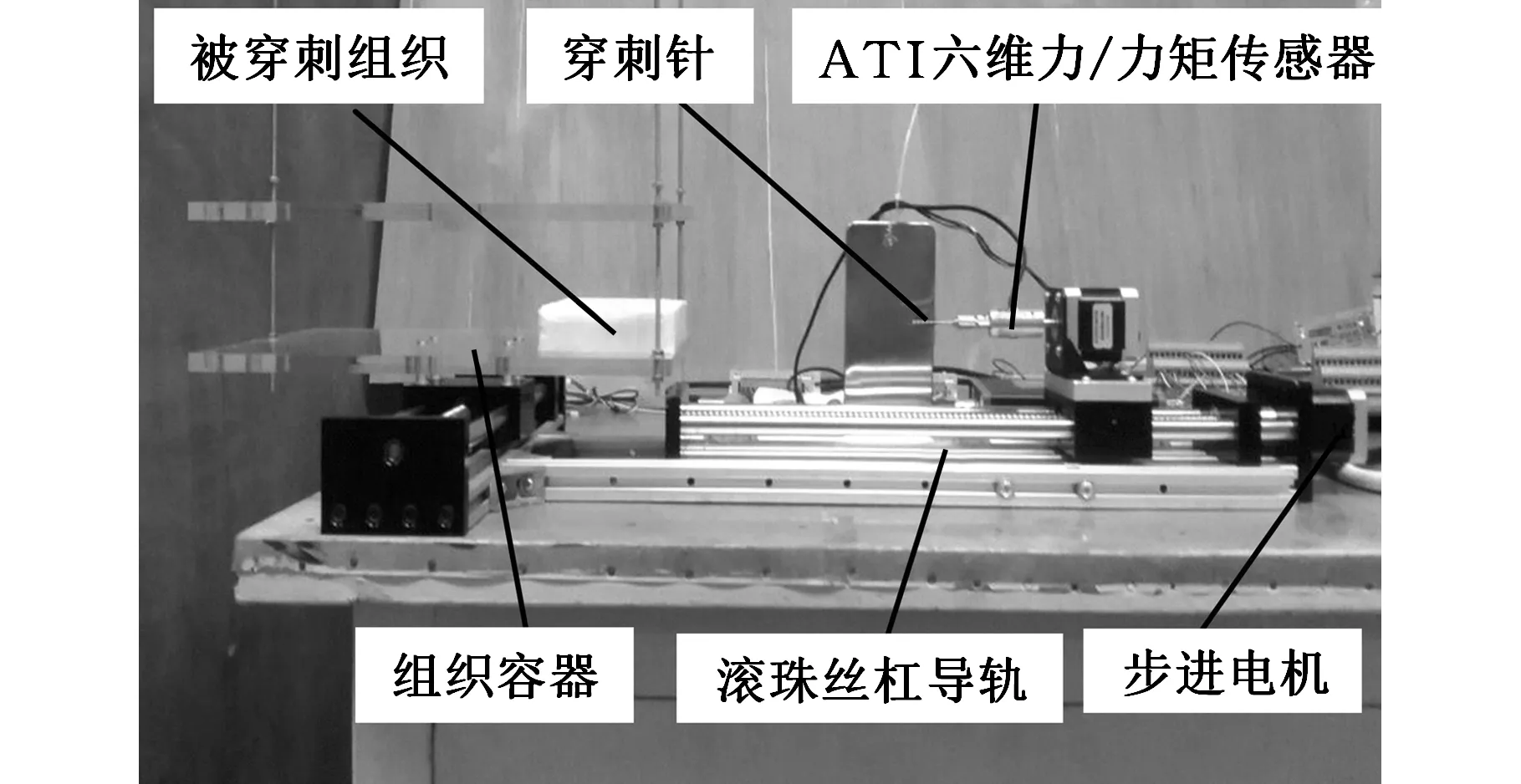
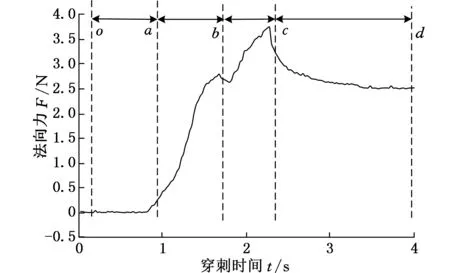
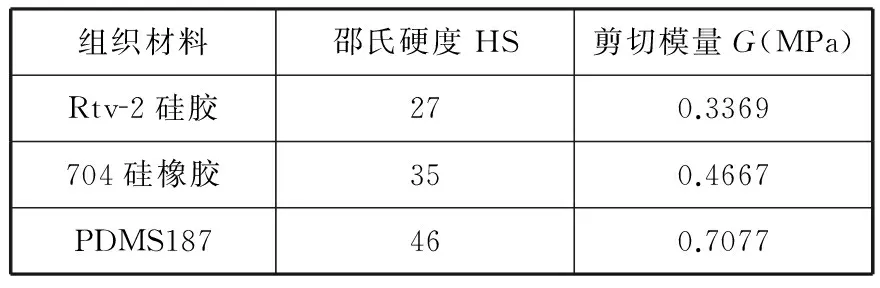
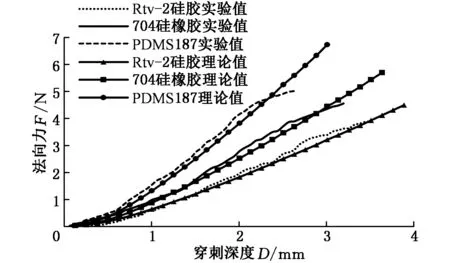
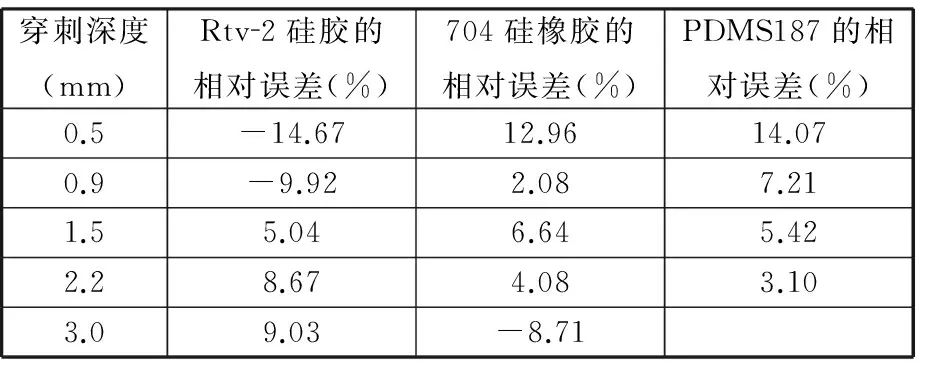
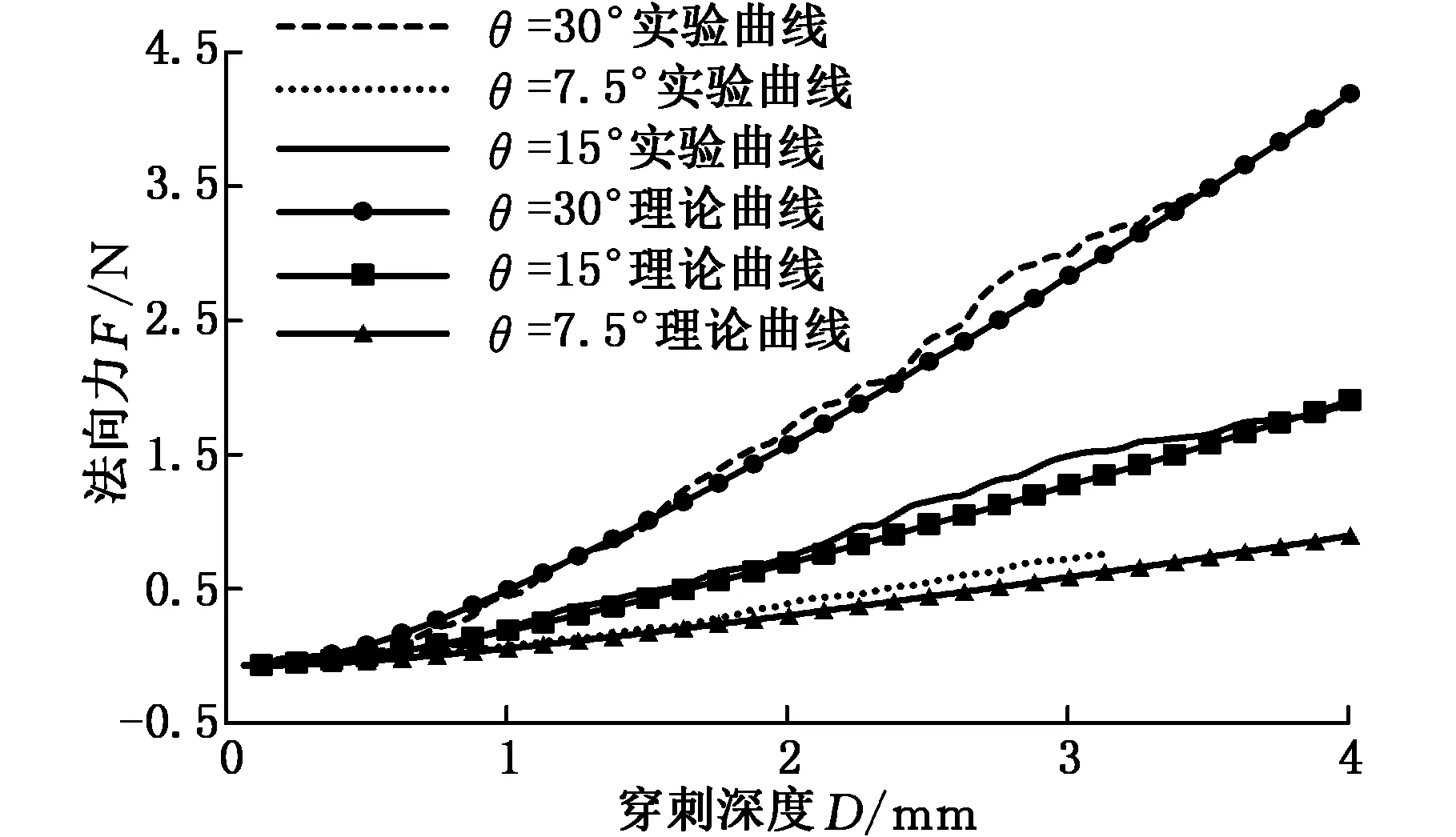
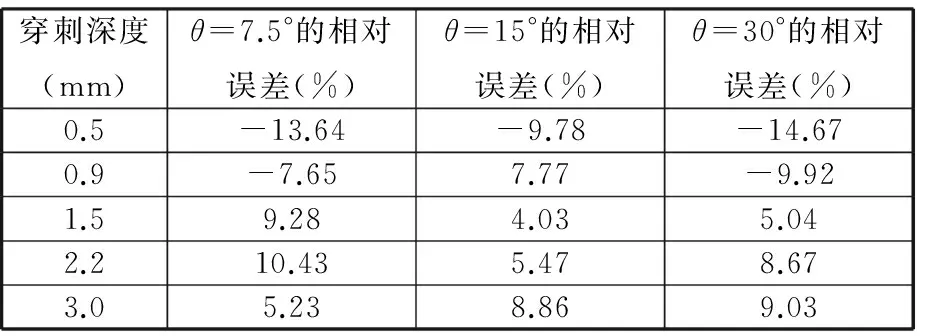
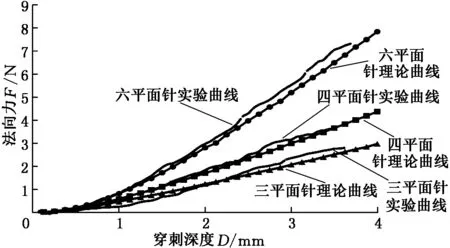
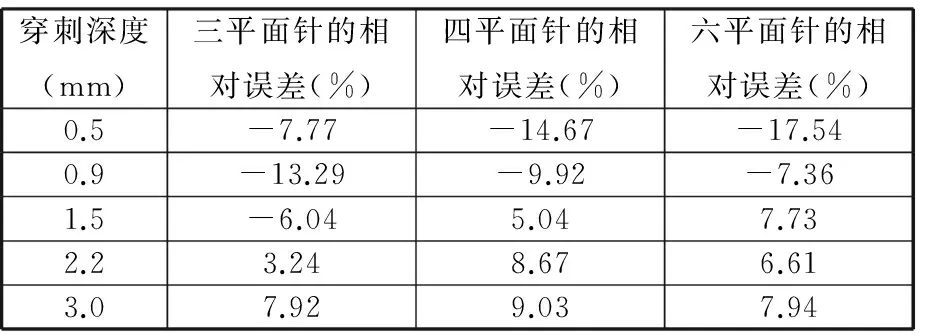
由于弹性组织的变形轮廓为双曲线闭合围成的区域,故由1.3节中离心率e的范围可得出参数κ的取值范围为0<κ 将式(14)代入式(13)中得穿刺深度D: (15) 由式(15)可知穿刺深度D由参数κ和区域夹角Φ共同决定,则三平面、四平面、六平面锥形针的穿刺深度D随参数κ的变化情况如图6所示。 图6 多平面锥形针的D-κ曲线图 由图6可知,在针的成形平面数确定的前提下,穿刺深度D随参数κ值的增大而逐渐变小;在相同参数κ的取值处,三平面针的穿刺深度D最小,六平面针的穿刺深度D最大,平面锥形针的穿刺深度D随平面数的增大而增大。 将式(14) 、式(15)代入式(11)中得到多平面锥形针的法向力F为 (16) Q=[(61+132cos2Φ+48cos4Φ-16cos6Φ)Φ7+ (210sin2Φ+168sin2Φcos2Φ)Φ5+(840sin4Φ)Φ3+ (5040sin6Φ)Φ]κ-[(315+360cos2Φ)Φ7+(588sin2Φ+ 168sin2Φcos2Φ)Φ5+Φ3840sin4Φ]κ3+[(495+ 180cos2Φ)Φ7+378Φ5sin2Φ]κ5-225Φ7κ7+0(κ9) (17) 由式(16)和式(17)可知多平面锥形针所受的法向力F是由弹性组织的剪切模量G、针尖的半顶角θ、接触区域夹角Φ和参数κ决定的。下文将详细分析各个因素对平面针的受力变化影响。 2.2剪切模量对法向力的影响 剪切模量G是组织材料的一个重要力学性能参数,反映了组织材料的抗变形能力。剪切模量G越大,组织的刚性越大,则组织抗变形的能力越强。 多平面锥形针的法向力F是由多个因素共同决定的。在分析剪切模量G对法向力F的影响时,对其他参数进行如下取值:υ=0.4、θ=30°、Φ=45°,将给定的参数值代入式(16)中。当剪切模量G分别为0.3369 MPa、0.4667 MPa和0.7077 MPa时,比较法向力F随参数κ的变化特点,如图7所示。 图7 不同剪切模量的F-κ曲线图 由图7分析可知,组织的剪切模量越大,若要组织变形程度达到相同的κ值,所需要的法向力越大。因此组织的剪切模量越大,针的受力越大,不利于针对组织进行穿刺。 2.3半顶角对法向力的影响 半顶角θ是针尖几何外形的一个参数,它反映了针尖切削刃的锋利程度。半顶角θ越小,针尖切削刃越锋利。 研究半顶角θ对法向力F的影响时,首先取υ=0.4、Φ=45°、G=0.3369 MPa,并将给定的参数值代入式(16)中。当半顶角θ分别为7.5°、15°和30°时,比较法向力F随参数κ的变化关系,如图8所示。 图8 不同半顶角的F-κ曲线图 由图8可知,平面锥形针的半顶角θ越小,若要组织变形程度达到相同的κ值,则所需要的法向力越小。因此针的半顶角θ越小,针尖切削刃越锋利,针的穿刺性能越好。 2.4平面数对法向力的影响 由1.2节可知,区域夹角Φ是由穿刺针的成形平面数决定的。将三平面、四平面、六平面锥形针的区域夹角Φ代入式(16)中,可得三平面、四平面和六平面锥形针的法向力F。 三平面锥形针的法向力F为 F=2835Gtanθ(0.25-κ2){π(1-υ)[3140.84κ- 1696.96κ3+1102.77κ5-310.73κ7+0(κ9)]}-1 (18) 四平面锥形针的法向力F为 F=1260Gtanθ(0.5-κ2){π(1-υ)[665.726κ- 293.402κ3+164.323κ5-41.4774κ7+0(κ9)]}-1 (19) 六平面锥形针的法向力F为 F=315Gtanθ(0.75-κ2){π(1-υ)[54.0202κ- 20.8727κ3+10.5162κ5-2.42758κ7+0(κ9)]}-1 (20) 在分析平面数对法向力F的影响时,取υ=0.4,θ=30°,G=0.3369 MPa,对比不同平面针的法向力F随参数κ的变化特点,分析平面数对法向力F的影响。 由式(18)、式(19)和式(20)可得到以上三种平面针的法向力F随参数κ的变化曲线,如图9所示。 图9 多平面锥形针的F-κ曲线图 由图9可以得出:对于不同平面的穿刺针,在参数κ的相同取值处,针的成形平面越多,所需要的法向力F越大。当施加相同作用力穿刺组织时,三平面锥形针对弹性组织产生的变形程度最大,更容易穿刺组织,由理论分析可得三平面对称针的穿刺性能要好于其他平面对称针的穿刺性能。 3实验验证 3.1实验设备 采用ATI公司生产的Nano17六维力/力矩传感器对锥形针的受力大小进行测量,通过配合使用研华USB-4716数据采集卡和NI公司开发的LabView可视化程序开发平台,设计出传感器的数据采集系统,利用该系统对针穿刺过程中的受力进行采集。穿刺实验平台如图10所示。 图10 穿刺实验平台 使用直径为2 mm、长度为50 mm的平面锥形针,以3.8 mm/s的速度对实验组织进行匀速穿刺。为确保实验结果的准确性,每种实验分别进行15次穿刺,对15组穿刺实验结果取平均值进行分析,最终得到整个穿刺过程中针的受力随时间的变化关系,如图11所示。 3.2穿刺实验过程分析 图11所示为针从没有接触组织开始,直到刺破进入组织后针在整个穿刺过程中的受力变化情况。图中o~a阶段为针未穿刺组织阶段;a~b阶段为针与组织发生接触变形阶段;b~c阶段为组织刺破后针继续穿刺阶段;c~d阶段为针停止穿刺后停留在组织内部的阶段;b时刻组织发生瞬时断裂。实验部分集中研究针与组织的接触变形阶段(即a~b阶段),以此验证理论模型的准确性。 图11 穿刺过程中针的受力变化图 3.3实验结果分析 多平面锥形针的材料为轴承钢,其硬度远远大于实验组织材料的硬度,因此在实验过程中平面锥形针的变形可以忽略不计。实验内容分别从组织的剪切模量、针尖半顶角和针形平面数等三个方面分析了针与组织接触阶段时的受力影响。为了验证理论模型的准确性,将实验数据与理论模型相比较,通过对比分析验证理论模型的合理性。根据式(15)可得穿刺深度D是由参数κ和针的成形平面数共同决定的。首先将F-κ曲线转化为F-D曲线,通过对比实验值与理论值的相对误差,进而验证理论分析的准确性。 3.3.1剪切模量对法向力的影响 在小变形的范围内,可将硅胶材料作为各向同性的弹性组织,实验中的穿刺组织分别选用Rtv-2硅胶、704硅橡胶和PDMS187,三种组织的材料特性参数[16]如表1所示。 表1 三种组织的材料特性表 使用直径为2 mm、半顶角θ=30°的四平面锥形针分别对以上三种组织材料进行穿刺,并对针接触阶段的受力数据进行采集和分析,研究剪切模量G对法向力F的影响。最终得到针穿刺三种不同组织材料的实验和理论受力,如图12所示,并得到实验和理论值之间的相对误差,如表2所示。 图12 不同组织接触阶段的实验与理论受力对比图 表2 不同组织接触阶段的实验值与理论值的相对误差 由图12可得:针与组织发生接触过程中,在穿刺深度相同的前提下,组织的剪切模量越大,针的接触受力越大。分析表2中的数据可得:穿刺三种不同的组织时,在误差允许的范围内,穿刺力实验值和理论值的变化趋势大致相似,三种组织的实验和理论值都能实现较好的拟合。因此由以上分析可知:组织的剪切模量越小,针使组织发生相同穿刺深度时的受力越小,越有利于实现针对组织的穿刺。 3.3.2半顶角对法向力的影响 在分析半顶角θ对法向力F的影响时,分别采用半顶角θ分别为7.5°,15°和30°的四平面锥形针,对Rtv-2硅胶组织进行穿刺,对针接触阶段的实验数据进行采集,得到三种针形的实验和理论受力,如图13所示,并对比得到实验值和理论值之间的相对误差,如表3所示。 图13 接触阶段中不同半顶角的实验与理论受力对比图 三种半顶角的针形穿刺相同组织时,在实现相同穿刺深度的前提下,针形的半顶角越大,针的受力越大。由表3分析可得:三种针形的理论值和实验值从变化趋势和取值大小两方面都能实现较好的拟合。由理论接触模型和穿刺实验数据分析可得:当组织发生相同穿刺深度时,针形的半顶角越小,针的受力越小,越有利于针对组织进行穿刺。 表3 接触阶段中不同半顶角的实验值与理论值的相对误差 3.3.3平面数对法向力的影响 分别采用半顶角θ=30°的三平面、四平面和六平面锥形针,以相同的速度对Rtv-2硅胶组织进行穿刺,最终得到三种针形在穿刺过程中的实验和理论受力,如图14所示,并得到实验和理论值之间的相对误差分析,如表4所示。 图14 接触阶段中不同平面针实验与理论受力对比图 表4接触阶段中不同平面针实验值与理论值的相对误差 穿刺深度(mm)三平面针的相对误差(%)四平面针的相对误差(%)六平面针的相对误差(%)0.5-7.77-14.67-17.540.9-13.29-9.92-7.361.5-6.045.047.732.23.248.676.613.07.929.037.94 由图14可知:三种不同平面的针形穿刺组织时,在实现穿刺深度相同的前提下,六平面针的受力最大,四平面针的受力其次,三平面针的受力最小。根据表4中的相对误差分析得到:三种平面针的实验值能较好地拟合理论值的变化。因此可得,对于平面锥形针,减小针的成形平面数,穿刺针的受力变小,有利于针对组织进行穿刺。 由以上实验和理论对比分析得出,实验和理论值在变化趋势相同的情况下,两者之间的相对误差不超过20%,实验和理论曲线能够较好地吻合。鉴于实验设备和实验条件自身的局限性,相对误差位于合理的范围内。因此通过对比实验验证了组织剪切模量、针形半顶角和针的平面数三个因素对多平面锥形针的受力变化影响,从而证明了理论接触模型是有效可行的。 4结论 (1)根据弹性接触理论建立了接触模型,准确反映了接触变形阶段多平面锥形针的受力变化特点。 (2)组织的剪切模量越小,实现相同穿刺深度时平面锥形针的受力越小,组织越容易实现穿刺。 (3)在实现相同穿刺深度的前提下,针形半顶角越小,针的受力越小,穿刺性能越好。因此改善针形半顶角对提高针的性能具有重要的指导意义。 (4)对于带有尖端的多平面锥形针,减小针的成形平面数,针在接触过程中的受力将变小,有利于提高针在接触变形阶段的穿刺性能。 参考文献: [1]IczkowskiKA,CasellaG,SeppalaRJ,etal.NeedleCoreLengthinSextantBiopsyInfluencesProstateCancerDetectionRate[J].Urology, 2002, 59(5): 698-703. [2]MooreJZ,MalukhinK,ShihAJ,etal.HollowNeedleTissueInsertionForceModel[J].CIRPAnnals—AanufacturingTechnology, 2011, 60(1): 157-160. [3]MooreJZ,McLaughlinPW,ShihAJ.NovelNeedleCuttingEdgeGeometryforEnd-cutBiopsy[J].MedicalPhysics, 2012, 39(1): 99-108. [4]MooreJZ,ZhangQ,McGillCS,etal.ModelingofthePlaneNeedleCuttingEdgeRakeandInclinationAnglesforBiopsy[J].JournalofManufacturingScienceandEngineering, 2010, 132(5): 051005. [5]HanP,CheD,PallavK,etal.ModelsoftheCuttingEdgeGeometryofMedicalNeedleswithApplicationstoNeedleDesign[J].InternationalJournalofMechanicalSciences, 2012, 65(1):157-167. [6]WangY,TaiBL,ChenRK,etal.TheNeedlewithLancetPoint:GeometryforNeedleTipGrindingandTissueInsertionForce[J].JournalofManufacturingScienceandEngineering, 2013, 135(4): 041010. [7]FrancoJrAR,PintaúdeG,SinatoraA,etal.TheUseofaVickersIndenterinDepthSensingIndentationforMeasuringElasticModulusandVickersHardness[J].MaterialsResearch, 2004, 7(3): 483-491. [8]LarssonPL,GiannakopoulosAE,SöderlundE,etal.AnalysisofBerkovichIndentation[J].InternationalJournalofSolidsandStructures, 1996, 33(2): 221-248. [9]KravchukA,RymuzaZ,JarzabekD.PenetrationofaPyramidIndenterintoaMultilayerCoating[J].InternationalJournalofMaterialsResearch, 2009, 100(7): 933-935. [10]高立营, 张勤河, 刘明, 等. 基于单元刀具切削的活检针切削力模型[J]. 医用生物力学, 2012,27(1):77-83. GaoLiying,ZhangQinhe,LiuMing,etal.CuttingForceModelofBiopsyNeedleBasedonCuttingofElementaryCuttingTools[J].JournalofMedicalBiomechanics, 2012, 27(1): 77-83. [11]孙银山, 吴冬梅, 杜志江, 等. 用于机器人辅助穿刺手术进针策略研究的猪肝进针力建模[J]. 高技术通讯, 2011, 21(9): 948-953. SunYinshan,WuDongmei,DuZhijiang,etal.ModelingofNeedleInsertionForceinPorcineLiversforStudyingNeedleInsertionStrategiesofRobot-assistedPercutaneousSurgery[J].ChineseHighTechnologyLetters, 2011,21(9): 948-953. [12]GiannakopoulosAE.ElasticandViscoelasticIndentationofFlatSurfacesbyPyramidIndentors[J].JournaloftheMechanicsandPhysicsofSolids, 2006, 54(7): 1305-1332. [13]BarberJR,SturlaFA.ApplicationoftheReciprocalTheoremtoSomeProblemsfortheElasticHalf-space[J].JournaloftheMechanicsandPhysicsofSolids, 1992, 40(1): 17-25. [14]FabrikantVI.FlatPunchofArbitraryShapeonanElasticHalf-space[J].InternationalJournalofEngineeringScience, 1986, 24(11): 1731-1740. [15]BarberJR.DeterminingtheContactAreainElastic-indentationProblems[J].JournalofStrainAnalysisforEngineeringDesign, 1974, 9:230-232. [16]NunesLCS.ShearModulusEstimationofthePolymerPolydimethylsiloxane(PDMS)UsingDigitalImageCorrelation[J].MaterialsandDesign, 2010, 31(1): 583-588. (编辑袁兴玲) 收稿日期:2015-08-25 基金项目:江苏省自然科学基金资助项目(BK20141414);江苏省研究生培养创新工程资助项目(SJLX_0119);南京邮电大学引进人才科研启动基金资助项目(NY214020) 中图分类号:R318.01 DOI:10.3969/j.issn.1004-132X.2016.12.006 作者简介:李成刚,男,1975年生。南京航空航天大学机电学院副教授、博士。主要研究方向为生物工程力学、传感器技术等。发表论文40余篇。林家庆,男,1990年生。南京航空航天大学机电学院硕士研究生。申景金,男,1984年生。南京邮电大学自动化学院讲师。谢志红,女,1991年生。南京航空航天大学机电学院硕士研究生。崔文,男,1990年生。南京航空航天大学机电学院硕士研究生。侯小蕾,女,1988年生。南京航空航天大学机电学院硕士研究生。 StudyonContactModelandInfluencingFactorsofMultiplanarPyramidNeedleLiChenggang1LinJiaqing1ShenJingjin2XieZhihong1CuiWen1HouXiaolei1 1.NanjingUniversityofAeronauticsandAstronautics,Nanjing,210016 2.NanjingUniversityofPostsandTelecommunications,Nanjing,210046 Abstract:Considering the difficulties in analyzing multiplanar pyramid needle’s force at the tissue’s contact stage, a multiplanar pyramid needle’s contact model was derived, which was based on the deformation between needle and tissue, and the problems of contact force and the puncturing performance was emphatically discussed. The model indicated that the contact force of the multiplanar pyramid needle was influenced by three factors, tissue’s shear modulus, needle’s half-apex angle and the number of needle’s surfaces. The contact model was validated by the experiments and the experimental curves are in good agreement with theoretical data, which indicates the model is accurate and effective. According to the research results, in order to reduce the contact force and improve the puncturing performance of needle during the contact stage, it is a wise choice to select smaller tissue shear modulus, decrease needle’s half-apex angle or the number of needle’s surfaces. Key words:multiplanar pyramid needle; contact model; shear modulus; half-apex angle; number of needle’s surface