雷达组网抗距离-速度欺骗复合干扰技术研究*
2016-07-21孙殿星王国宏贺达超杨忠
孙殿星,王国宏,贺达超,杨忠
(海军航空工程学院 信息融合研究所,山东 烟台 264001)
探测跟踪技术
雷达组网抗距离-速度欺骗复合干扰技术研究*
孙殿星,王国宏,贺达超,杨忠
(海军航空工程学院 信息融合研究所,山东 烟台264001)
摘要:利用距离多假目标-速度欺骗复合干扰下虚假目标检测概率高、与真实目标角度量测相近的特点,提出了基于雷达组网的低可观测目标跟踪方法。首先根据角度量测信息完成各雷达量测集的划分与融合,然后进行雷达量测划分同源假设检验,利用虚假目标所暴露的真实目标的角度信息,构造低可观测目标的量测输入,提高目标跟踪的稳定性,最后利用目标速度估计径向投影与速度量测的差异鉴别速度欺骗干扰。仿真结果证明了该技术的可行性和有效性。
关键词:雷达网;距离多假目标-速度欺骗复合干扰;量测集;低可观测目标;目标跟踪;速度估计
0引言
随着现代战争中电子对抗的愈加激烈,雷达的生存环境变得十分恶劣,尤其是随着数字射频存储器(DRFM)的广泛应用使雷达在信号层面上准确识别“假目标”的难度增大[1],而隐身技术和无人机技术的发展[2],则使干扰机平台的检测概率显著降低,雷达很难对其进行稳定跟踪。另外,为了增强干扰效果,欺骗干扰手段向复合化发展,其中距离多假目标-速度欺骗复合干扰即为应用较广的一种。针对上述问题,如何提高雷达的抗干扰能力已成为近年来关注的焦点[3-12]。从公开文献来看,针对距离欺骗和速度欺骗干扰,现有抗干扰方法总体分为基于信号处理和基于数据处理两类。
文献[3-5]是基于信号处理的抗欺骗干扰方法:其中文献[3]是针对机载雷达,采用广义旁瓣相消技术在空域滤除干扰,需要对雷达的信号处理机制有较大的改动;文献[4-5]的核心思想是利用真/假目标回波信号的差异性进行干扰的识别和剔除,因此随着欺骗信号逼真度的提高,干扰识别的难度增大,欺骗信号通过信号层的判别而进入数据处理层的情况也在所难免,并且当目标的信噪比降低、可观测性变差时,上述方法对真实目标的正确鉴别率也会受到较大影响。文献[6]是通过数据处理与信号幅度信息相结合的方法,识别虚假目标。文献[7-11]是基于单雷达或雷达网数据处理的抗欺骗干扰方法,但都是以目标量测输入存在为前提,若目标的检测概率降低、多个时刻没有目标量测输入,往往会导致跟踪滤波发散,并且大多是针对距离欺骗一种干扰样式,没有考虑距离-速度欺骗复合干扰情况。针对低可观测目标探测跟踪技术,国内外学者也进行了大量研究[12-15],为提高雷达网对低可观测目标的探测跟踪性能[15]发挥了重要作用,但现有方法大多没有考虑干扰,如何在距离多假目标-速度欺骗复合干扰下实现低可观测目标的稳定跟踪,目前尚未见到公开报道。针对以上问题,本文提出了距离多假目标-速度欺骗复合干扰下基于雷达组网的低可观测目标跟踪技术,首先根据角度量测信息完成各雷达量测集的划分与融合,并对各雷达量测划分进行同源假设检验,然后利用虚假目标所暴露的真实目标角度信息构造低可观测目标量测输入,以提高低可观测目标跟踪的稳定性,最后利用目标速度估计径向投影与速度量测的差异鉴别速度欺骗干扰。
1问题描述和总体思路
距离多假目标干扰是指干扰机产生多个具有虚假距离信息的欺骗干扰回波,其能量大于真实目标回波,而其他参数与真实目标近似相同;速度欺骗干扰通常为假多普勒频率干扰,其特征是多普勒频率不同于真实目标,能量强于真实目标,而其余参数近似等于真实目标;距离多假目标-速度欺骗复合干扰是上述两种干扰类型的结合。本文以信号层采取抗干扰措施效果不够理想、依然在数据层形成大量虚假目标的情况为研究背景。目前多数学者所提出的抗距离多假目标-速度欺骗复合干扰(或距离多假目标干扰)技术,并没有考虑目标低可观测性,但是“低可观测性”同样是我们必须面对的挑战。目前检测前跟踪(TBD)方法是低可观测目标检测跟踪的重要方法,其利用目标量测空间相关性累积回波能量提高信噪比,但采用TBD技术也会对欺骗干扰的回波能量进行空间积累,易将虚假目标误判为真实目标。针对上述问题,利用干扰回波能量强、检测概率高、量测输入稳定,且与真实目标角度量测相近似的特点,采用雷达组网的方式,充分挖掘干扰所暴露的目标角度信息,构建低可观测目标量测输入,提高目标跟踪稳定性,然后利用目标速度估计径向投影与速度量测差异性识别速度欺骗干扰。
2各雷达量测集的划分与融合
如图1所示,由前文所述:在不考虑随机误差的情况下,真实目标、虚假目标、雷达三者近似处于同一直线上,本文研究限于相同方位和俯仰角上仅有一个真实目标的情况,而对于这种态势的判别,由于篇幅限制作者将另文讨论。因此,若在相同的方向上出现多个量测值,其中应当包含若干个虚假目标,由此可以将雷达量测进行分组:

图1 距离多假目标干扰示意图Fig.1 Diagram of multi-range-false-target jamming
(1)

3组网雷达各量测划分的关联假设检验
3.1假设检验统计量
每个量测划分可以确定一条方向线,如图1所示,在不考虑量测误差的情况下,若量测来自同一真实目标,在不同雷达都发现目标情况下,会出现2条直线相交的情况;由于量测误差存在,这2条直线不可能相交,但是即这两条直线距离很远的概率一定“不大”。设在k时刻,雷达i的某个“量测划分”确定压缩后的俯仰角、方位角量测分别为θi,φi,方向线li的矢量为(cosθicosφi,cosθisinφi,sinθi);雷达j的某个“量测划分”确定压缩后的俯仰角、方位角量测分别为θj,φj,方向线lj的方向矢量为(cosθjcosφj,cosθjsinφj,sinθj);设雷达i,j的位置坐标分别为(xri,yri,zri),(xrj,yrj,zrj),取行列式H的值如下:
(2)
因为θi,φi,θj,φj分别服从均值为对应真值的高斯分布,所以行列式H亦近似服从高斯分布。同时,在不考虑量测误差的理想状态下直线li,lj相交的充要条件是M=0。所以,当原假设为:量测θi,φi,θj,φj来自同一真实目标时,行列式H的均值为0,有检验统计量

(3)

(4)

3.2关联假设检验算法
首先要尽可能去除虚假量测,以减小计算负担,并达到“去伪存真,精炼数据”目的。设N部雷达组网,利用2节方法对各部雷达量测进行“归类划分、角度融合”,得到量测集合

i=1,2,…,N,
(5)
4数学模型
4.1漏检目标跟踪模型
对于低可观测目标,通过构造目标量测输入实现“漏检目标补位”,克服目标量测缺失造成滤波发散问题,提高目标跟踪稳定性,同时也实现了虚假目标的剔除。不失一般性,以3部雷达组网的情况为例,设利用第2,3节所提出的方法将雷达1、雷达2、雷达3量测进行关联,设关联上的量测对分别为(θ1,φ1),(θ2,φ2),(θ3,φ3),3部雷达的位置坐标为(xri,yri,zri),i=1,2,3,可知这3组量测对应的直线方程为

(6)
在理想状态下,真实目标应当是上述3条直线的交点,由于实际量测误差的存在,方程组不可能相容,因此利用最小二乘法求其近似解,上式经变化后可得如下方程组:

式中:A,b可依据式(6)获得,则漏检目标的补位量测为
(7)
利用式(7)作为量测输入对目标进行跟踪,需计算其量测误差协方差阵,量测向量Zm全微分:

(8)
式中:R为滤波跟踪量测误差协方差阵,本文利用卡尔曼滤波算法对目标进行状态估计:
X(k+1)=F(k)X(k)+V(k),
(9)

(10)
Z(k+1)=Zm(k+1)+W(k+1),
(11)

(12)
式中:σθ1,σφ1,σθ2,σφ2,σθ3,σφ3分别是3部雷达的方位角、俯仰角量测误差标准差。
4.2基于速度估计径向投影的速度欺骗干扰鉴别



(13)
径向方向矢量为

(14)
(15)
cosθ1sinθ1cosφ1rx1z1,
(16)
式中:Gα为检验门限,可以根据显著性水平α来确定。
5仿真分析
(1) 仿真条件
设有3部雷达位置坐标分别为(0,0,0 )m,(5.7×104,0,0)m,(1.5×105,0,0 )m,真实目标的起始位置是(3.6×104,1.2×105,1.5×104)m;目标在x,y,z3个坐标轴方向的运动速度是(370,-220,-26)m/s,对目标连续观测200 s;3部雷达采样周期均为1 s,测距精度均为100 m,测角精度均为0.1 rad,测速精度为1 m/s。
(2) 仿真实验1
蒙特卡罗仿真次数为200次,在真实目标的两侧每隔1 600 m的距离产生一虚假距离目标,每侧各3个,并且真实目标以0.7的概率暂消;速度欺骗使得量测到的径向速度偏离真实径向速度,偏离大小为28 m/s。图2为目标跟踪位置误差,虽然每个时刻都存在距离欺骗干扰,且真实目标量测以0.7的概率暂消,但并没引起滤波发散,并且在跟踪稳定后误差基本能够保持在50 m以内,可见本方法排除了距离欺骗假目标的干扰。
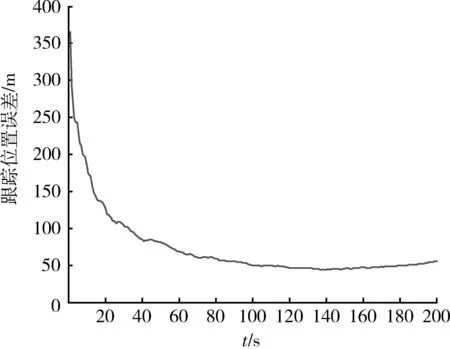
图2 跟踪位置误差Fig.2 Position error of target tracking
(3) 仿真实验2
文献[11]是关于雷达网抗距离多假目标欺骗干扰的代表性文献,与本文研究背景的相似性较高,因此将本文方法与文献[11]中的方法进行比较。其他条件不变,目标检测概率从0.1增大到1.0,滤波发散概率随目标检测概率变化的曲线如图3,图4所示。
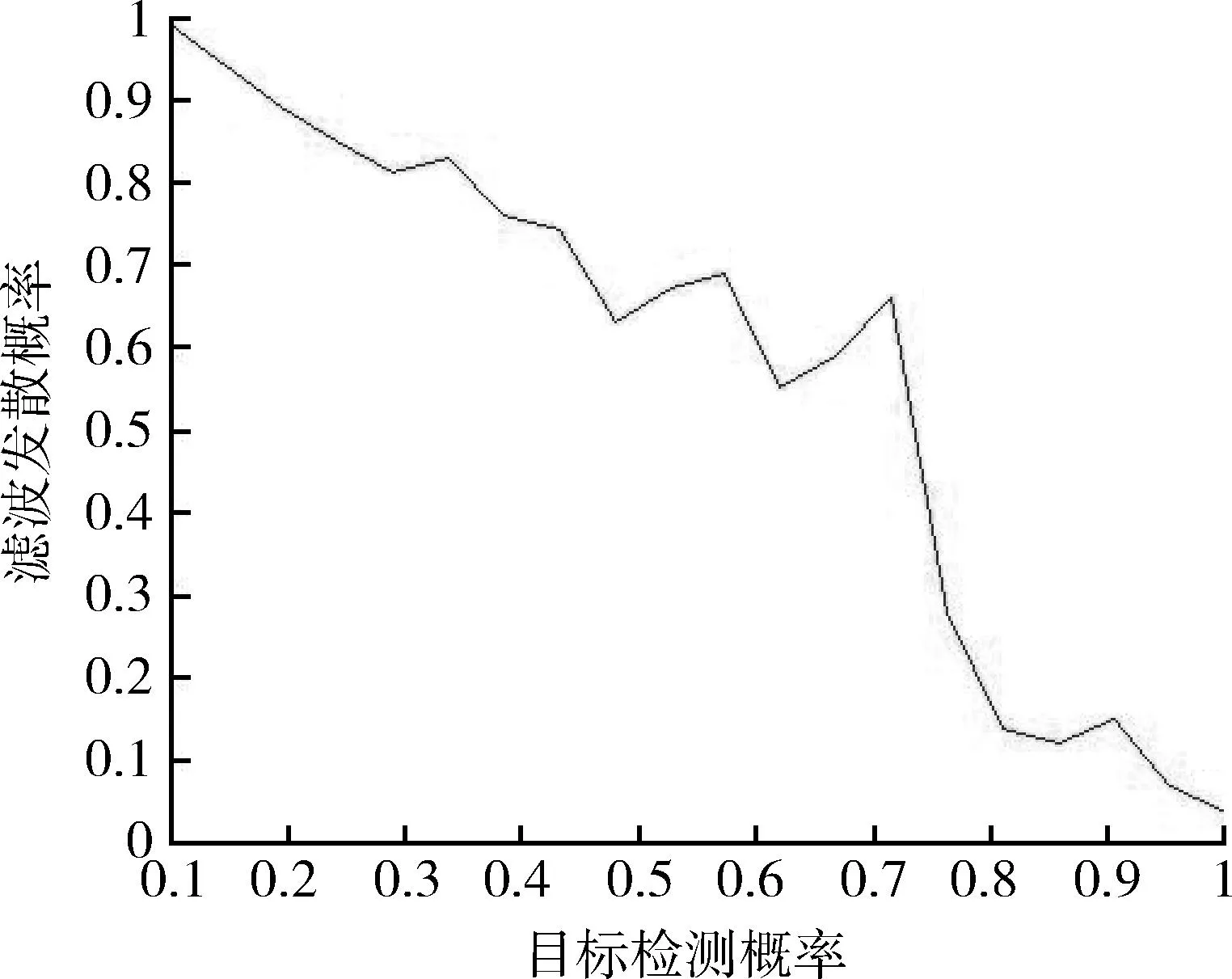
图3 目标检测概率对文献[11]滤波发散概率的影响Fig.3 Effect of target detection probability on thedivergence rate of the method [11]
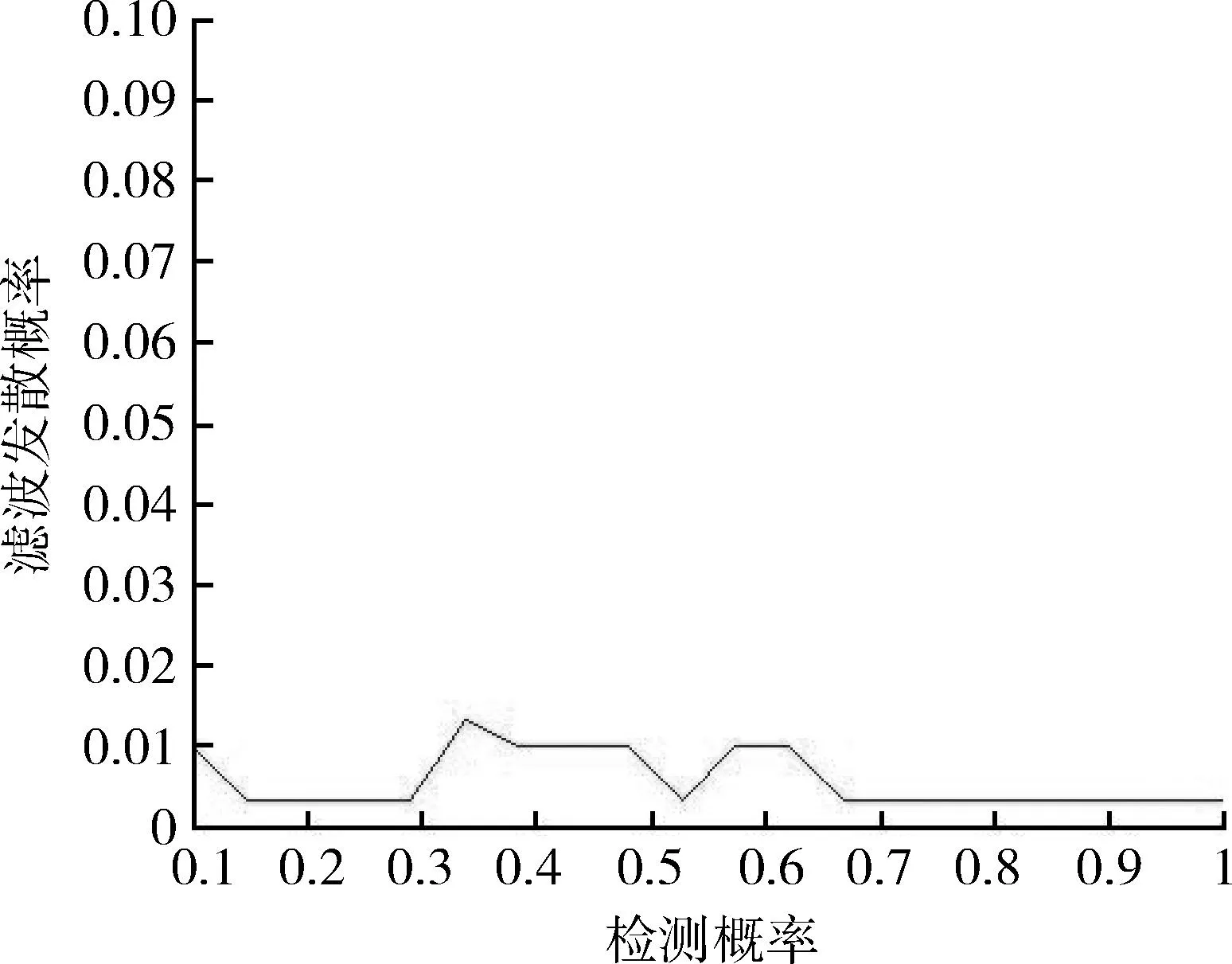
图4 目标检测概率对本文方法滤波发散概率的影响Fig.4 Effect of target detection probability on the divergence rate of the method in this paper
由于文献[11]主要是以高信噪比情况下的目标跟踪为研究对象,并没有考虑低可观测目标的情况,而本文方法是以低可观测目标为研究对象,因此文献[11]方法对目标检测概率的变化较为敏感,而本文方法在跟踪稳定性上具有一定的优势,如图4所示本文方法受目标检测概率影响不大,当目标检测概率在0.1~1变化时,滤波发散的概率始终保持在0.01左右,可见本文构建的等效量测能够保持滤波跟踪的稳定性,实现了复合干扰下低可观测目标的稳定跟踪。
(4) 仿真实验3
设真实目标回波的信噪比为6 dB,对于普通目标,欺骗干扰信号幅度通常为真实目标回波信号幅度的1.3~1.5倍,而本文是针对低可观测目标,所以此处取干扰信号幅度为真实目标信号幅度1.5倍。文献[12]提出一种基于Hough变换的雷达网检测前跟踪(TBD)方法,利用该方法对目标进行跟踪,仿真结果如下所示。由图5可知:由于欺骗干扰各个时刻的量测具有很好的空间相关性,能够较好地实现能量累积,同时干扰信号强度大于真实目标回波的信号强度,因此欺骗干扰能量累积的峰值大于真实目标能量累积的峰值,易将虚假目标误判为真实目标并将真实目标丢失,图中6个明显“尖峰”即虚假目标的能量累积,而“凹口”部分是真实目标能量累积。

图5 参数空间上的能量积累Fig.5 Accumulated power in parameter space
图6即为6个“尖峰”所对应虚假目标的航迹,由于量化误差等原因,其与真实目标轨迹存在一定的偏差,并且中间真实目标航迹是“空位”的。通过本仿真可知:当存在欺骗干扰时,文献[12]中的目标检测跟踪方法容易失效,会造成目标丢失与误判。

图6 目标航迹Fig.6 Target track
(5) 仿真实验4
设雷达测速精度为1 m/s不变,如图7所示当偏移量的大小从10 m/s递增到50 m/s时,正确鉴别率从90.5%左右递增到95%左右;设虚假速度相对真实速度的偏移量为20 m/s保持不变,3部雷达的测速精度均从0.5 m/s增大到3 m/s,仿真结果如图8所示,正确鉴别率略有下降,但变化不大,并且仍能保持90%以上。
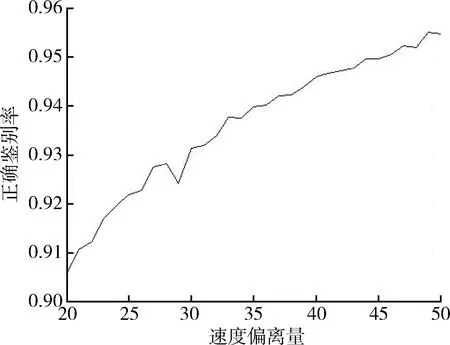
图7 速度欺骗偏移量对正确鉴别率的影响Fig.7 Effect of velocity deception deviation on the correct recognition rate
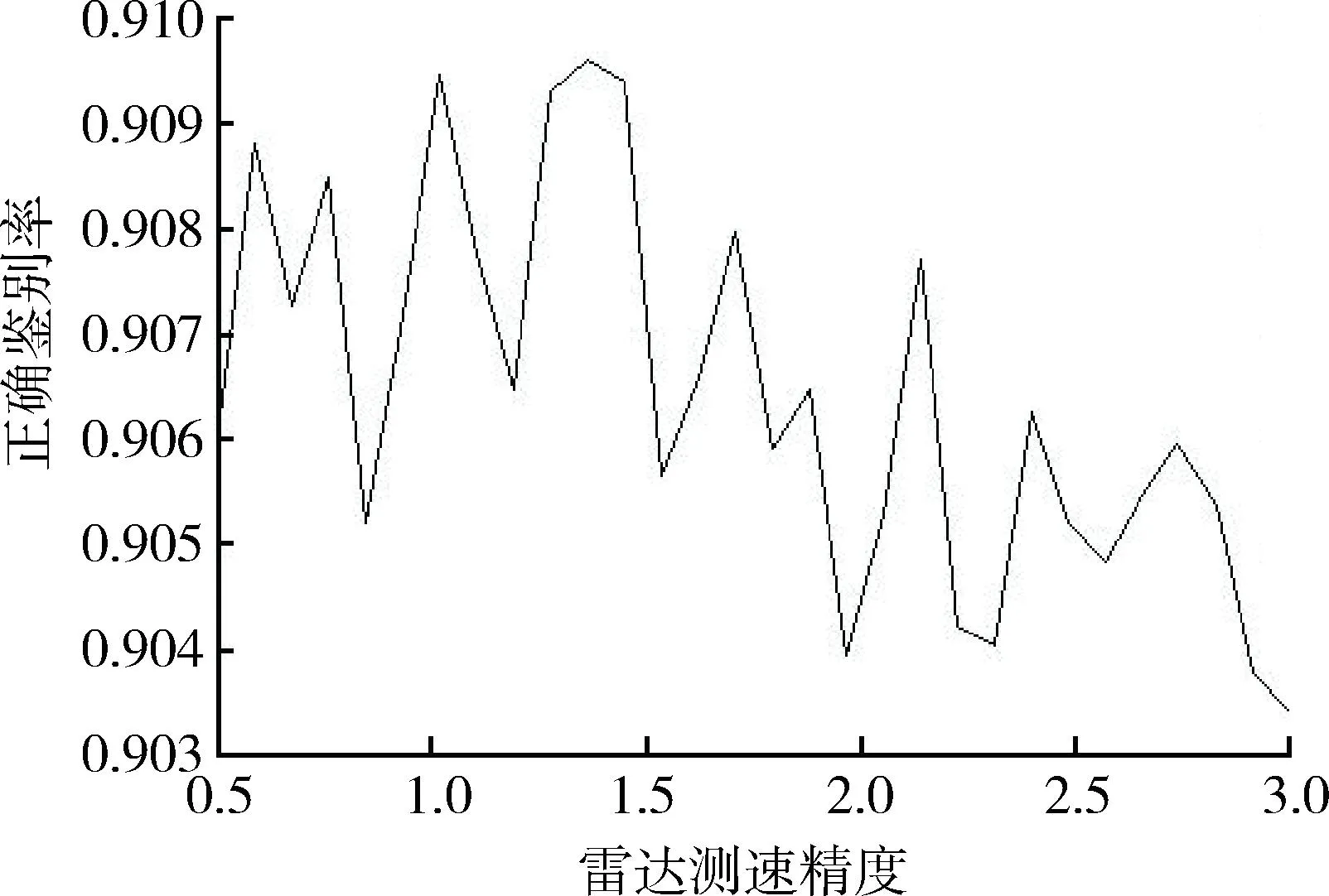
图8 雷达测速精度对正确鉴别率的影响Fig.8 Effect of radar velocity measurement erroron the correct recognition rate
6结束语
本文从距离多假目标-速度欺骗复合干扰特点出发,利用雷达网的信息融合优势,提出了一种距离多假目标-速度欺骗复合干扰下基于雷达组网的低可观测目标跟踪技术,着重解决了干扰鉴别难度大、低可观测目标跟踪稳定性差的问题。仿真实验表明:当目标检测概率较低时本方法仍能保持目标稳定跟踪,并且跟踪的精度较高;对虚假目标正确鉴别率能够保持在90%以上,错误鉴别率低于10%,当雷达测速精度变化时,本方法仍能稳定地对速度欺骗干扰进行鉴别。
参考文献:
[1]赵博,周峰,保铮.基于电磁散射模型的ISAR空中目标欺骗干扰方法[J].电子与信息学报,2014,36(1):194-201.
ZHAO Bo, ZHOU Feng, BAO Zheng. Deception Jamming for ISAR Aerial Target Based on Electromagnetic Scattering Mode[J].Journal of Electronics & Information Technology, 2014, 36(1):194-201.
[2]温杰. F-35的电子攻击型[J]. 国际航空, 2009, 32(1): 46-47.
WEN Jie. F-35 with Electronic Attack Capability [J]. International Aviation, 2009, 32(1): 46-47.
[3]吴亿锋,王彤,吴建新.基于广义旁瓣相消的机载雷达抗密集转发式干扰方法[J]. 电子与信息学报,2014,36(5):1050-1053.
WU Yi-feng WANG Tong,WU Jian-xin. A Method to Suppress Dense Repeater Jamming for Airborne Radar Based on Generalized Sidelobe Canceller[J]. Journal of Electronics & Information Technology, 2014,36(5):1050-1053.
[4]卢云龙,李明,闫琰.一种利用调频匹配的DRFM欺骗干扰检测方法[J].西安电子科技大学学报,2014,41(5):77-84.
LU Yun-long, LI Ming, YAN Yan. A Method for Detecting DRFM Deception Jamming Based on LFM Rate Matching[J].Journal of XiDian University, 2014,41(5):77-84.
[5]孙闽红,唐斌.距离-速度同步拖引欺骗干扰的频谱特征分析[J]. 系统工程与电子技术, 2009, 31(1):83-85.
SUN Min-hong,TANG Bin. Distance-Speed Simultance Pull Jamming Frequency Characteristics Analysis[J]. Systems Engineering and Electronics, 2008, 23(3): 550-554.
[6]李迎春,王国宏,关成斌,等.速度拖引干扰和杂波背景下脉冲多普勒雷达目标跟踪算法[J].电子与信息学报,2015,37(4):989-994.
LI Ying-chun, WANG Guo-hong, GUAN Cheng-bin, et al. Algorithm for Target Tracking with Pulse Doppler Radar in the Presence of Velocity Gate Pull off/in Jamming and Clutter Environment[J].Journal of Electronics & Information Technology, 2015, 37(4): 989-994.
[7]饶彬,王雪松.球坐标系下具有抗干扰能力的弹道导弹跟踪算法[J]. 电子学报, 2009, 37(9):1944-1949.
RAO Bin, WANG Xue-song. Ballistic Missile Tracking Algorithm with Anti-Jamming Capability in Spherical Coordinates [J]. Acta Electronica Sinica, 2009, 37(9): 1944-1949.
[8]张林让,赵珊珊.网络化雷达协同抗欺骗式干扰技术研究进展[J].数据采集与处理,2014,29(7):516-525.
ZHANG Lin-rang, ZHAO Shan-shan. Research Advance on Cooperative Anti-Deception Jamming in Netted Radar [J]. Journal of Data Acquisition and Processing,2014,29(7):516-525.
[9]李世忠,王国宏.异地配置的主/被动雷达抗多假目标干扰[J].火力与指挥控制,2013,38(5):10-13.
LI Shi-zhong, WANG Guo-hong. Study on Algorithm Against Multi-False-Target Deception Jamming for Active/Passive Radar at Different Sites[J]. Fire Control & Command Control, 2013,38(5):10-13.
[10]李世忠,王国宏.三维空间主/被动雷达抗多假目标干扰研究[J].现代防御技术,2012,40(6):118-124.
LI Shi-zhong, WANG Guo-hong. Algorithm Against Multi-False-Target Deception Jamming for Three-Dimensional Active/Passive Radar at Different Sites[J]. Modern Defense Technology, 2012, 40(6):118-124.
[11]赵艳丽,王雪松.多假目标欺骗干扰下组网雷达跟踪技术[J]. 电子学报, 2007, 35(3):454-459.
ZHAO Yan-li, WANG Xue-song. Tracking Technique for Radar Network in the Presence of Multi-Range False-Target Deception Jamming [J]. Acta Electronica Sinica, 2007, 35(3): 454-459.
[12]KABAKCHIEV CHR, GARVANOV I, DOUKOVSKA L, et al. TBD Netted Radar System in Presence of Multi False Alarms[C]∥ The 6th European Radar Conference, Rome Italy, October 2009:509-512.
[13]LI Lei, SUN Jin-qiu, YU Zhu, et al. Dim Target Tracking Base on GM-PHD Filter[J]. Lecture Notes in Computer Science,2012,7202(1): 286-294.
[14]WANG Wen-guang, SUN Zuo-wei,LI Chen-ming.Study on Dim Target Detection and Discrimination from Sea Clutter[J]. China Ocean Engineering, 2013,27(2): 183-192.
[15]赵志超,饶彬,王雪松,等.基于概率网格Hough变换的多雷达航迹起始算法[J].航空学报,2010,31(11):2209-2215.
ZHAO Zhi-chao, RAO Bin, WANG Xue-song, et al. Multi-Radar Track Initiation Algorithm Based on Probabilistic Grid Hough Transform [J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(11): 2209-2215.
Antijamming Technique in the Presence of Range-Velocity Deception Compound Jamming Based on Radar Network
SUN Dian-xing, WANG Guo-hong, HE Da-chao, YANG Zhong
(Naval Aeronautical and Astronautical University, Institute of Information Fusion, Shandong Yantai 264001,China)
Abstract:A low observable target tracking method based on radar network is proposed in the presence of the property of range-velocity deception compound jamming which has high detection probability and similar angle-measurements to the target. Firstly, the angle-measurement set of each of the radars is partitioned according to the angle information and the measurements within the same partition are fused. Then the hypothesis testing for the same source measurements of each partition is realized. Finally, velocity deception jamming is recognized according to the diversity between the radial projection of target velocity estimation and the radial velocity measurement. Simulation results verify the feasibility and validity of the proposed algorithm.
Key words:radar network; multi-range-false-target velocity-deception compound jamming; measurement set; low observable target; target tracking; velocity estimation
*收稿日期:2015-06-25;修回日期:2015-08-17
基金项目:国家自然科学基金项目(61179018, 61102165, 61002006);“泰山学者”建设工程专项经费资助项目
作者简介:孙殿星(1983-),男,黑龙江伊春人。工程师,博士,研究方向为信号与信息处理。
通信地址:264001山东省烟台市二马路188号海军航空工程学院信息融合研究所E-mail:sdxdd.hi@163.com
doi:10.3969/j.issn.1009-086x.2016.03.014
中图分类号:TN953.6;TN97
文献标志码:A
文章编号:1009-086X(2016)-03-0084-07