基于累积和等距映射的缓变故障检测方法
2016-07-19谷善茂刘云龙
谷善茂 张 妮 刘云龙
(潍坊学院信息与控制工程学院 山东 潍坊 261061)
基于累积和等距映射的缓变故障检测方法
谷善茂张妮刘云龙
(潍坊学院信息与控制工程学院山东 潍坊 261061)
摘要针对化工过程存在的缓变微小故障,提出一种基于累积和等距离映射(CUSUM-ISOMAP)的多变量过程故障检测方法。该方法首先运用累积和控制图的思想,分别对每一个变量计算均值偏差累积和及方差偏差累积和,之后建立扩展增广矩阵,对增广数据运用基于ISOMAP的降维特征提取算法建立统计量进行故障检测。传统的ISOMAP算法无法获取输入输出数据之间的映射关系,不能处理新的采样数据。引入核岭回归算法获得新采样点的降维输出。CSTR过程的仿真结果表明了算法对过程微小故障实施故障检测的有效性。
关键词累积和控制图ISOMAP算法核岭回归缓变故障故障检测
0引言
通过多元数据的降维方法可以将高维数据映射到低维本征空间,获得多个变量之间隐含的特征信息,大量线性及非线性的数据降维技术已经提出并得到广泛的应用,其中,非线性特征提取技术能够处理复杂的非线性过程,在数据存在非线性耦合相关时,相比于线性降维方法可以得到更为完整的数据特征信息[1-5]。
对于流形学习数学描述的提出引起了故障诊断领域研究者的广泛重视,作为近年来发展起来的多变量数据的特征提取技术,基于流形学习的故障诊断方法得到了初步的应用并取得了较好的监控效果[6-8]。相对于传统的PCA、CVA等多元统计故障检测算法,基于ISOMAP流形学习的故障检测方法避免了线性假设的条件[9]。虽然现有文献对基于流形学习的故障检测和诊断算法开展了一系列的研究,然而仍旧存在一些问题尚未分析解决。一方面,基于流形学习的特征提取方法无法确定输入输出数据之间的映射关系,对于新的采样数据不易获得降维输出。另一方面,在实际工业过程中,故障类型并不常为仿真所得的大幅值阶跃变化,很大一部分故障为不易观测的缓慢变化的微小故障,如设备老化导致其性能逐渐降低,催化剂活性发生缓慢变化等,这类故障最初出现时,故障征兆较小,故障特征并不明显,然而随着时间的推移,容易造成实际过程逐渐偏离质优高效的生产目标,严重时甚至引起重大的经济损失和人员损伤。因此,如何改进原有的ISOMAP流形学习算法实施缓慢变化的微小故障检测是实际生产过程迫切需要解决的问题。
基于累积和控制图(CUSUM)的微小故障检测方法相对较为成熟,传统的单变量CUSUM算法仅考虑了单个采集变量,在操作复杂的化工过程中没有考虑多个变量之间的相关性。文献[10]将传统的单变量CUSUM拓展为多变量CUSUM,用于TE过程改善了算法对于微小故障的检测效果。邓等提出了基于累积和核独立元分析的故障检测方法,可以更为有效地检测非线性过程的缓变故障[11]。Shams联合PCA和CUSUM算法,对TE过程不易判别的故障可以有效地进行检测和识别[12]。
本文引入多变量CUSUM对原有的ISOMAP算法进行改进,提出了一种基于CUSUM-ISOMAP算法的非线性过程缓变故障检测方法。该方法首先对单变量进行预处理,高维数据的每一个观测变量在一定的时间窗内分别计算其均值偏差累积和及方差偏差累积,运用多变量CUSUM重构每个时刻的观测数据值。之后运用ISOMAP算法提取其相应的非线性子流形特征信息,在子流形空间和残差空间分别建立监控统计量实施过程监控,测试样本的低维输出通过非线性核岭回归方法进行计算。最后通过CSTR过程验证了文中所提方法的有效性。
1基于CUSUM的数据预处理
工业过程发生的许多故障为微小缓变型故障,造成过程变化缓慢,反映在原始采样变量上的变化也是缓慢的,不易进行观测。在过程变量变化较小特别是信号信噪比较小时,经典的多元数据分析的故障检测方法仅仅运用当前时刻的信息而未对历史信息加以考虑,不能敏锐地捕捉到过程信息的变化,需要在故障发生一段时间之后才能检测到过程异常的出现。CUSUM控制图可以用于检测过程微小变化,在故障征兆信息较小时,通过对历史微小变化信息的滑动时间窗累积实行对工业过程工况的进一步判断。从而,CUSUM方法可以获得更多的有用信息,提高整个故障检测的灵敏度。
文中对观测数据运用两种预处理方法,对每一维观测变量分别计算其当前时间窗内的均值偏差累积和和方差偏差累积和,对每一维数观测变量分别进行数据预处理,之后采用ISOMAP流形学习方法建立监控统计量T2和SPE,进一步将这些统计量用于故障检测中。
假设过程采集矩阵为Xn×m,其中n为采集样本点数,m为测量变量的个数。对高维数据进行预处理[12]。
(1)
(2)

从而,对采样点分别进行预处理之后组成扩展矩阵:
(3)
其中,α为权值因子且0<α<1。
2基于ISOMAP流形学习的故障检测
2.1基于ISOMAP的特征提取
流形学习方法是一类特征提取方法,通过流形学习算法可以得到嵌入在高维数据空间的低维光滑流形。ISOMAP是一种基于流形学习的非线性维数约减算法,传统的多维尺度变换(MDS)算法中,常用的欧氏距离不能体现数据集的内在结构。作为MDS算法的重要改进,Tenenbaum等[9]在ISOMAP算法中引入了测地距离代替欧氏距离作为两点之间距离的量度。
ISOMAP是一种全局优化的流形学习算法,其基本思想是数据点从高维空间映射到低维空间,映射前后数据点对之间的距离保持不变。相对于MDS算法,该算法的核心思想是运用两点之间的测地线距离代替欧氏距离来表征流形上数据点之间内在的几何关系,实现高维变量的降维。
设原始高维数据为X=(x1,x2,…,xn)Txi∈Rm,降维后的坐标为Y=(y1,y2,…,yn)Tyi∈Rd,ISOMAP算法的步骤进一步表示为:

(2) 计算邻域关系图中数据点对间的最短路径,即测地线距离dM(xi,xj)。用近邻图G上xj和xi之间的最短路径dM(xi,xj)近似流形M上的测地线距离,得到距离阵DM。
dM(xi,xj)=min{dE(xi,xj),dE(xi,xp)+dE(xp,xj)}p=1,2,…,n
(4)
(3) 保持测地距离阵DM不变,运用MDS算法计算高维数据对应的低维输出。
(5)
其中,I为n阶单位阵,l为元素为1的n维列向量。观测数据的d维输出为:
(6)
其中,Λ对应矩阵B的特征值构成的对角阵,特征向量为a1,a2,…,ad,a=(a1,a2,…,ad)。
2.2新采样数据的映射输出计算
多变量核岭回归是一种结构风险最小化的算法,相对经验风险最小化的学习算法[13],具有更高的建模精度,文中引入核岭回归的方法对ISOMAP算法的输入输出数据进行拟合,易于在线数据的非线性映射输出。
J(W)=min(Y-XW)2
(7)
J(W)=min(Y-XW)2+λ‖W‖2
(8)
其中,W是待定权值矩阵,λ是正则项参数。对式(8)求解,可以得到:
W=XT(XXT+λI)-1Y
(9)
上述方法是线性回归方法,在数据之间存在非线性耦合相关时无法得到合理的降维输出,文中进一步引入核变换思想解决该类问题,设非线性变换函数为φ,通过对原数据变换可得φ(x),最优化目标J(W)随之变为:
J(W)=min(Y-Φ(X)W)2+λ‖W‖2
(10)
代入式(9)得到相应的权值矩阵:
W=ΦT(ΦΦT+λI)-1Y=ΦT(K+λI)-1Y
(11)

将式(11)得到的权值矩阵W代入下式可以得到在线新采集样本xnew的降维映射输出:
ynew=WTΦ(xnew)=YT(K+λI)-1Φ(xnew)
(12)
其中,Y代表正常工况下数据集的映射输出,Φ(xnew)=[k(x1,xnew),k(x2,xnew),…,k(xn,xnew)]T为新样本与样本库的训练样本在特征空间的内积向量。从而,基于CUSUM-ISOMAP的故障检测方法中,结合核函数技术的非线性映射能力,不需要获知具体的非线性映射函数,解决了输入输出数据集之间的非线性映射问题。
2.3监控统计量的建立
文中基于CUSUM-ISOMAP算法的故障检测中,在原始空间和降维空间分别计算T2和SPE统计量,前者对数据在子流形空间的变化信息进行监控,后者对建模空间之外的残差空间的变化趋势进行监控,结合两监控统计量的变化实现故障检测,统计量算式为:
T2=yT[YTY/(n-1)]y
(13)

(14)

3仿真验证
3.1CSTR简介
连续搅拌式反应器(CSTR)是典型的一阶化学反应过程,是化工生产过程常用的基本单元,亦是众多大型复杂过程的核心。CSTR过程中,物料A进入反应器内发生一级不可逆放热反应生成物料B,冷却剂通过夹套把反应过程中产生的热量带走,在该装置上进行故障检测算法的研究具有普遍意义。如图1所示。
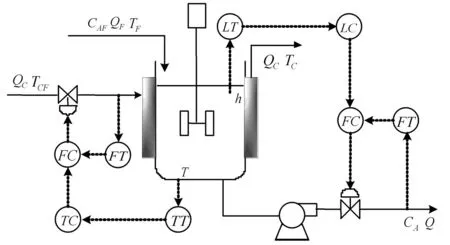
图1 CSTR系统
文中将CSTR过程中常见的缓慢变化的故障,如入口物流量发生小幅值阶跃变化、入口物流温度发生小幅值斜坡变化、催化剂活性缓慢降低、物料流量发生缓慢变化以及传感器微小故障等进行模拟,常见故障列表如表1所示。
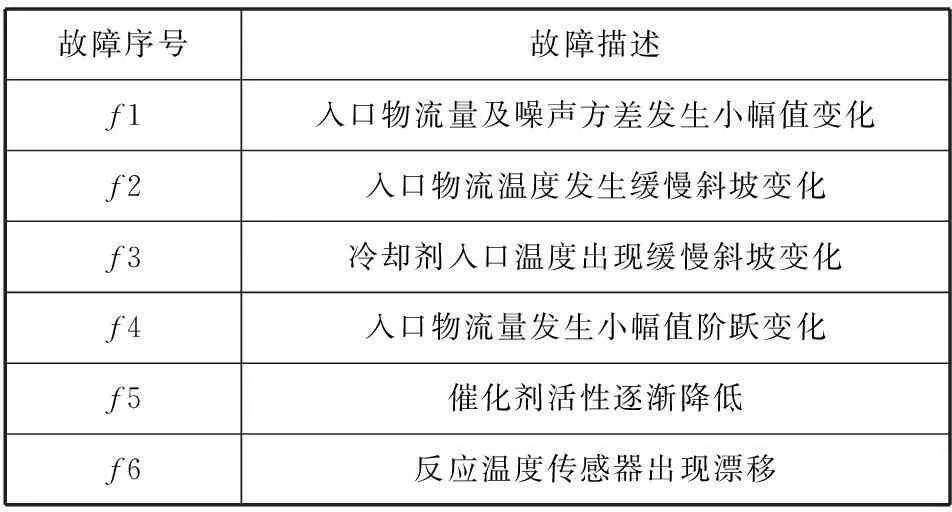
表1 CSTR过程故障描述
3.2仿真结果分析
为了实施故障检测,首先对采集的正常工况训练数据进行离线建模,运用CUSUM-ISOMAP算法提取数据的低维子流形信息,其中,低维空间的维数采用方差累积贡献率确定为8,进一步计算得到两监控统计量对应置信水平为95%的控制限。随后采用一组正常工况数据作为预测样本,利用CUSUM-ISOMAP算法实施故障检测,过程故障检测结果如图2所示,T2和SPE两个统计量均在控制限以下波动,其对应的误报率分别为5.07%和4.63%,具有较好的过程监控性能。
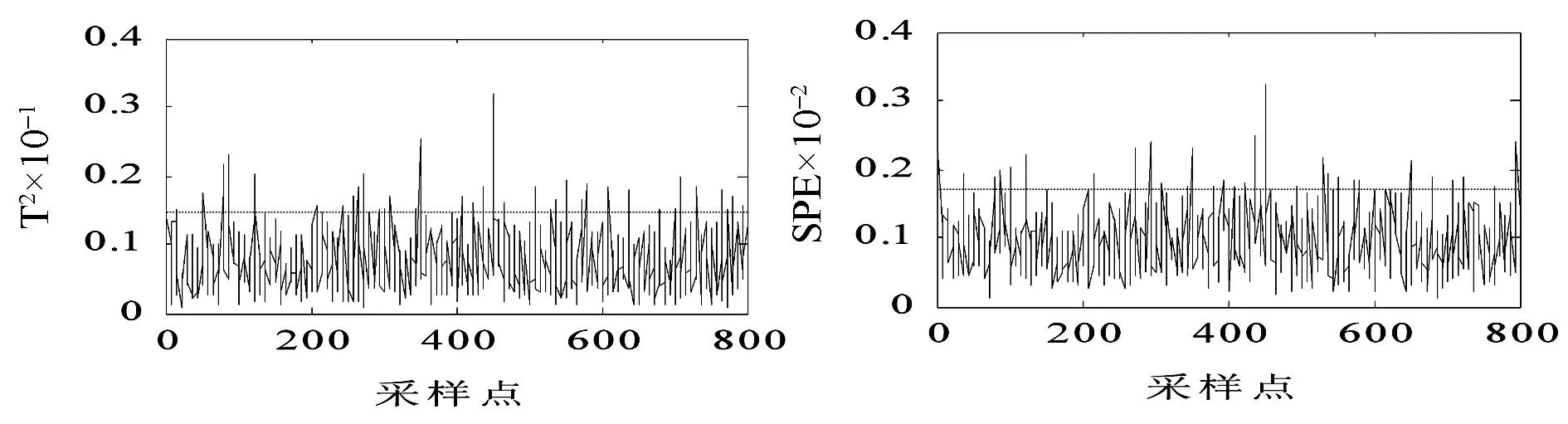
图2 正常工况的故障检测结果
图2中,横坐标表示过程第i个采样点(i=1,2,…),纵坐标T2和SPE分别代表每个采样点对应的两个监控统计量,点划线代表故障检测的阈值,均设定为95%的控制限。
对不同故障工况分别进行仿真,仿真过程中对采集变量分别进行存储,变量维数为10,故障开始时刻设置为1001,采集样本总数设定为2000,故障检测的阈值均设定为95%的控制限。
故障f1为入口物流量及采集的噪声方差发生小幅值变化,f1发生时噪声方差由0.01变为0.02,代表变量入口物流量QF所发生的变化如图3(a)所示。

图3 CSTR过程模拟故障
利用仿真,分别采用ISOMAP和CUSUM-ISOMAP两种方法对上述的故障f1进行检测,比较ISOMAP和CUSUM-ISOMAP两种方法的故障检测率,即故障发生后超出阈值的样本数目与实际故障样本总和的比值。图4为两种方法的监控对比图,基于ISOMAP的故障检测方法中,两监控统计量的故障检测率分别为61.00%和78.30%,而CUSUM-ISOMAP方法的T2和SPE统计量对应的故障检测率分别为90.50%、86.20%,具有相对较高的故障检测率,可见所提方法对微小故障的检测效果较原始的ISOMAP有了一定的改善和提高,从而,文中所提的考虑均值和方差偏差累积和的CUSUM-ISOMAP方法可以更为有效地检测到故障发生。
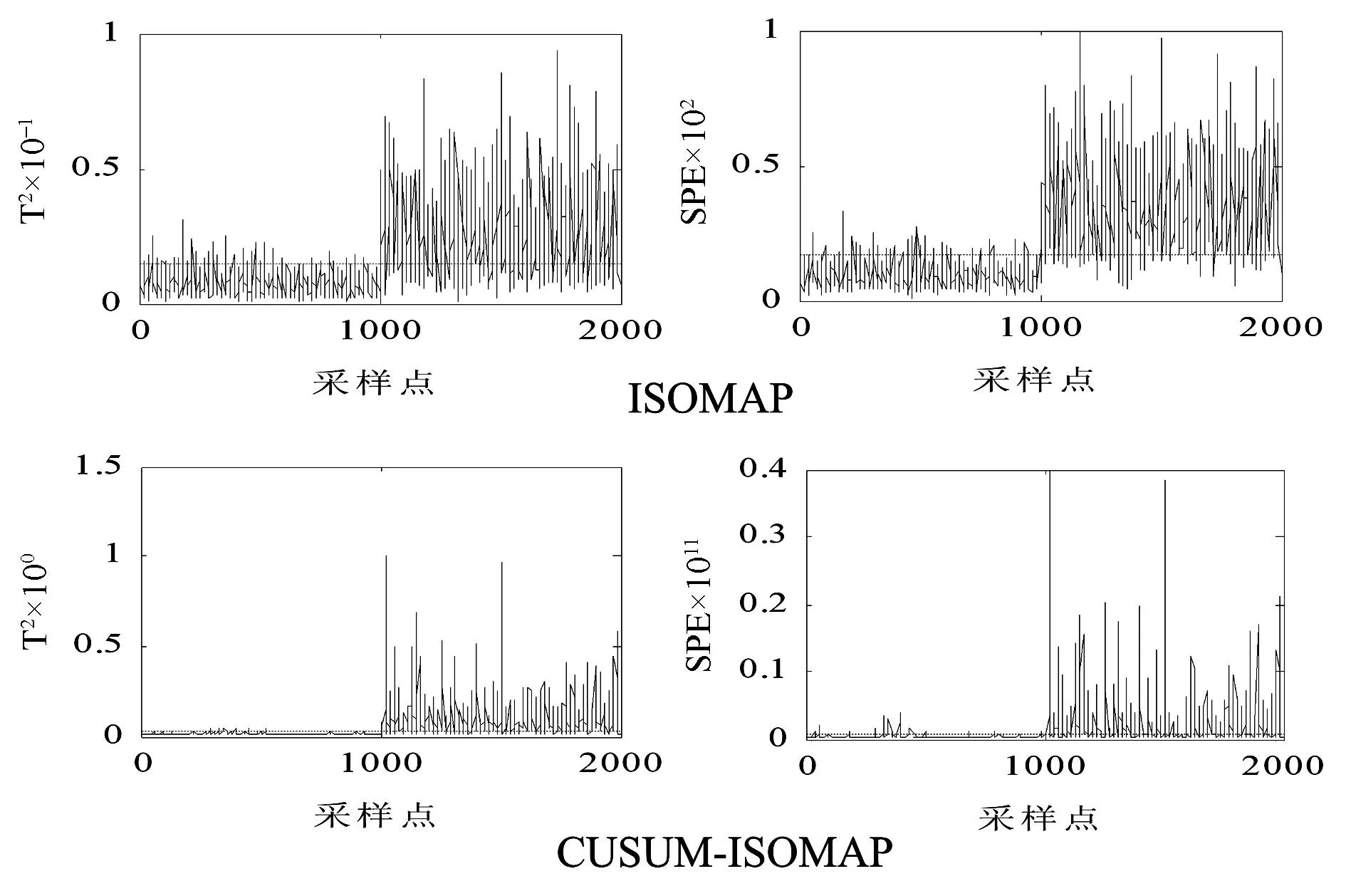
图4 过程监控图比较
故障f2为反应物的入口物流温度发生缓慢的斜坡变化,在仿真模型中,从第1001个采样时刻开始,设置参数发生以下变化TF(i)=320-0.08×e^((i-1000)/1000),如图3(b)所示。图5所示为故障f2的监控图比较结果。故障发生后,监控统计量皆出现斜坡变化趋势。ISOMAP方法的T2统计量和SPE统计量分别在第1049、1004个采样时刻检测到故障发生,通过对原始数据计算滑动时间窗累积和变化,应用CUSUM-ISOMAP特征提取技术后,本文所提的方法对应的故障检测时刻分别为1001和1002个采样时刻,通过对比可见,本文提出的方法能够比原有的ISOMAP方法更为快速地检测到故障出现,反应更为灵敏,更加接近故障发生的真实时间。进一步比较两种算法的故障检测率,CUSUM-ISOMAP方法中,T2和SPE统计量的故障检测率分别对应为96.50%和87.30%,而原有ISOMAP的故障检测方法中,T2和SPE统计量的故障检测率分别为49.30%和83.10%,可以明显地看出,对于过程微小缓慢变化,文中方法可以更为灵敏和有效地改善故障检测效果。

图5 过程监控图比较
选取CSTR的5种不同的缓变故障样本进行算法的验证,表2列出了基于ISOMAP方法及CUSUM-ISOMAP方法的故障检测率的对比情况。由表可见,相比基于ISOMAP的故障检测方法,CUSUM-ISOMAP方法可以更为有效地获取缓变故障的特征信息,可以较为快速和有效地检测到缓变故障的出现。统计量的检测性能得到明显的改善,验证了所提算法的有效性,可以及时给工作人员提供报警提示。

表2 2种故障检测方法的检测率对比
4结语
本文提出了一种基于累积和等距离映射的非线性多变量故障检测方法,该方法通过计算单变量均值偏差和及方差偏差累积和对每一个变量进行变换和预处理,进一步结合CUSUM控制图的思想对原有的ISOMAP算法予以改进,有效地提取了缓变故障的特征信息。在线检测时运用核岭回归方法获得观测数据的降维输出。CSTR仿真系统的结果进一步说明,基于累积和等距离映射的故障检测方法可以更好地获取微小缓变征兆的特征信息,较为灵敏的获取过程的微小变化,从而可以取得较好的故障检测效果,保证生产过程的安全稳定运行。
参考文献
[1]VenkatasubramanianV,RengaswamyR,KavuriSN,etal.AreviewofprocessfaultdetectionanddiagnosisPartIII:processhistorybasedmethods[J].ComputersandChemicalEngineering,2003,27(3):327-346.
[2]QinS.Surveyondata-drivenindustrialprocessmonitoringanddiagnosis[J].AnnualReviewsinControl,2012,36(2):220-234.
[3] 韩利强,陈泽华,曹长青,等.TEP故障诊断方法研究[J].计算机应用与软件,2014,31(7):82-85.
[4]RussellLH.Faultdetectionanddiagnosisinindustrialsystem[M].London:SpringerVerlagPress,2003.
[5]JiangQC.Faultdetectionanddiagnosisinchemicalprocessesusingsensitiveprincipalcomponentanalysis[J].Industrial&EngineeringChemistryResearch,2013,52(4):1635-1644.
[6]ShaoJD,RongG.Nonlinearprocessmonitoringbasedonmaximumvarianceunfoldingprojections[J].ExpertSystemswithApplications,2009,36(8):11332-11340.
[7]ZhangMuguang,GeZhiqiang,SongZhihuan,etal.Global-LocalStructureAnalysisModelandItsApplicationforFaultDetectionandIdentification[J].Industrial&EngineeringChemistryResearch,2011,50(11):6837-6848.
[8]WongWK,ZhaoHT.Supervisedoptimallocalitypreservingprojection[J].PatternRecognition,2012,45(7):186-197.
[9] 张妮,田学民.基于等距离映射的非线性动态故障检测方法[J].上海交通大学学报,2011,45(8):1202-1206.
[10] 葛志强,宋执环.基于MCUSUM-ICA-PCA的微小故障检测[J].浙江大学学报:工学版,2008,42(3):373-377.
[11] 邓晓刚,田学民.基于SKICA的非线性过程缓变故障检测方法研究[J].仪器仪表学报,2009,30(7):1359-1362.
[12]BinShamsMA,BudmanHM,DueverTA.Faultdetection,identificationanddiagnosisusingCUSUMbasedPCA[J].ChemicalEngineeringScience,2011,66(20):4488-4498.
[13]AnSJ,LiuWQ,VenkateshS.Facerecognitionusingkernelridgeregression[C]//CVPR2007:ProceedingsoftheIEEEComputerSocietyConferenceonComputerVisionandPatternRecognition,Minneapolis,June17-22,2007,Piscataway,NJ:IEEEPress,USAc2007.
[14]HoerlAE,KennardRW.Ridgeregression:Biasedestimationfornonorthogonalproblems[J].Technometrics,1970,12(1):55-67.
RAMP FAULT DETECTION METHOD BASED ON CUSUM-ISOMAP
Gu ShanmaoZhang NiLiu Yunlong
(College of Information and Control Engineering,Weifang University,Weifang 261061,Shandong,China)
AbstractIn order to detect the ramp minor fault in chemical processes, we proposed a new multivariable process fault detection method which is based on CUSUM-ISOMAP. It first calculates the mean deviation cumulative sum and variance deviation cumulative sum for each variable using the idea of CUSUM control chart, and then creates extended augmented matrix and employs the ISOMAP-based dimensionality reduction feature extraction algorithm on the augmented data to set up statistics and carry out fault detection. Traditional ISOMAP algorithm is unable to get the mapping relationship between inputs and outputs, so it cannot handle the new sampling data. In the paper we introduce Kernel ridge regression algorithm to obtain the dimensionality-reduced outputs of the new sampling data. Simulation result of CSTR process shows the effectiveness of the method proposed in the paper on exerting fault detection for minor process fault.
KeywordsCUSUM control chartISOMAP algorithmKernel ridge regressRamp faultFault detection
收稿日期:2015-01-13。国家自然科学基金项目(61403283)。谷善茂,讲师,主研领域:过程控制,电力电子技术。张妮,讲师。刘云龙,讲师。
中图分类号TP391.4
文献标识码A
DOI:10.3969/j.issn.1000-386x.2016.06.060
