高性能物探船推进动力系统配置分析
2016-07-16波饶广龙李铭贾旭东
王 波饶广龙李 铭贾旭东
(1.中国船舶及海洋工程设计研究院 上海200011; 2.中海油田服务股份有限公司 天津300000)
高性能物探船推进动力系统配置分析
王 波1饶广龙1李 铭2贾旭东2
(1.中国船舶及海洋工程设计研究院 上海200011; 2.中海油田服务股份有限公司 天津300000)
[摘 要]文章结合物探船的工作特点,分析比较多种推进动力系统配置。通过对已在发达国家服役的高性能物探船推进动力系统实例进行分析比较以及发展方向的探讨,为今后国内设计新型物探船动力系统提供较好的方向和思路。
[关键词]物探船;工况;推进系统;动力配置
饶广龙(1988-),男,硕士,工程师,研究方向:轮机工程。
李 铭(1974-),男,工程师,研究方向:物探专业。
贾旭东(1972-),男,工程师,研究方向:轮机工程。
引 言
动力系统为船舶提供推进动力及为船上各种辅助设备提供电力。动力系统的设计对物探船的技术性能和造价具有重要的影响。本文结合物探船的工作特点,分析比较多种推进动力系统配置,为今后物探船的设计工作提供参考。
1 物探船的工作特点
物探船最主要类型是地震船,它利用地震勘探技术从事调查作业。作业时尾部拖带扩展器、枪阵、电缆等水下设备,通过震源空压机供气、枪阵放炮、水下电缆回收震源波获取地质资料信息。其主要运行工况为物探作业和航行工况,具有以下工作特点[1]:
(1)航速。从出发港到作业海区或在作业海区之间调遣时,要求航速约为15 kn,功率主要用于船舶推进;物探作业时,航速约为5 kn,拖带水下电缆、炮缆和驱动大型物探空压机的功率占主导。
(2)拖力。即有效推力与船舶总阻力之差。一般认为,拖力随航速增大而减少,当航速为零时,拖钩牵引力达到最大值,即等于系柱拖力;当拖钩牵引力为零时,有效推力等于船舶总阻力,船舶处于自由航行状态。物探船在最大拖航采集作业工况下,需达到要求的最大拖力。此时,作业船尾部拖带多根电缆和枪阵作直线航行,作业水域较宽阔,航区内应没有障碍物,保持正确的航向及5 kn稳定航速。如航速太快,拖带的电缆张力超限,容易将电缆拉断。
(3)工况多变。物探作业时,拖带的电缆数量和长度以及其与之相匹配的枪阵排数、震源容量会不相同。一艘12缆物探船,最大拖带12根电缆,根据不同工作水域海况特性,它有时仅拖8缆、6缆不等。即需要的拖带功率范围变化大,震源空压机的电动机功率的大小也随之变化。
(4)水下噪声。水下噪声对物探船数据采集准确性至关重要,任何船舶行进中的干扰都会使震波勘探数据处理复杂化。船舶拖带航行水下噪声指标需满足物探采集作业要求。
(5)推进冗余。多缆物探船拖带电缆根数多,主推进一旦失去动力后,航速即刻下降,导致昂贵的勘探拖带电缆下沉海底并缠绕,从而造成严重经济损失。主推进需要有一定的冗余,确保船上的任何故障不会导致超出50%前行动力的损失。这对保持5 kn航速,保护高成本的气枪和拖缆是及其重要的。所以,物探船多采用双轴、双桨推进,其首部大多配备有可伸缩桨作为辅助推进装置。
(6)工作机械负荷大。有用于物探的多台液压拖带设备:大型炮缆绞车、大型电缆绞车、扩展器牵引绞车等,液压动力泵站的功率较大。配备有多台震源空压机,震源空压机一般为较大功率电机驱动。属于具有大功率工作机械负荷的船舶。
物探船动力系统配置需满足上述工作特点。由于其主要设备在不同工况时所要求功率不一样,这就要求动力系统设计必须合理兼顾各种不同的工况,分析船上辅助设备和物探专用设备的使用情况,配置既能满足物探等大功率需求的电站,又能在自由航行、作业准备及停泊等低负荷工况时保证机组的使用处于合理的负荷状态,避免某一工况下柴油机负荷过低。
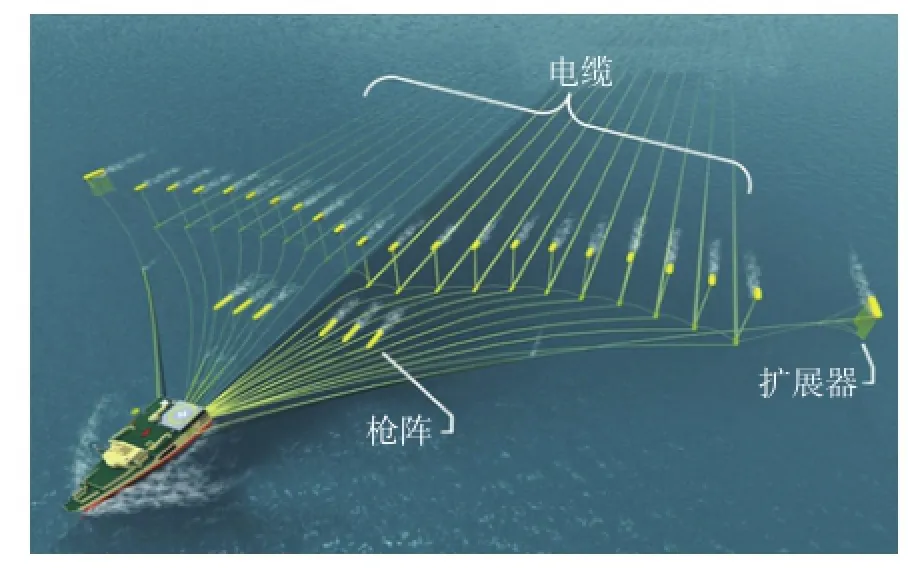
图1 物探船工作状态概览
2 物探船动力系统配置型式
高性能深水物探船由于其船型、布置等不同,动力系统的配置型式也不同。为满足航行和物探作业两种主要工况的要求,它的桨一般采用带导管调距桨,主机采用不可逆转调速柴油机。国内外同类型船通常选用以下几种推进系统。
2.1机械推进驱动方式
柴油机通过齿轮箱驱动调距桨和轴带发电机,轴发恒频恒速向电网供电。可调速主机带轴发时,工作在恒速模式下,螺旋桨推力大小及方向通过调距桨角度调节实现;不带轴发工作时,主机可调速。
2.2混合驱动方式
柴油机、电力混合动力装置。柴油机通过齿轮箱驱动调距桨和轴带电机,轴带电机PTO输出时作为发电机,PTI输入时作为电动机驱动螺旋桨。轴发PTO输出恒频恒速向电网供电, PTI输入时,可采用恒频恒速,也可变频变速,据项目的具体情况及要求。其中,混合驱动方式可细分为以下4种工况[2]:
(1)主柴油机功率全部用于驱动螺旋桨,轴带电机不带负荷。
(2)主柴油机驱动螺旋桨和轴带电机,轴带电机作为发电机,进行发电运行,把电能回馈给电网。
(3)螺旋桨由主柴油机与轴带电机共同带动;轴带电机作为电动机,电站将富裕功率用于驱动螺旋桨。
(4)螺旋桨由轴带电机带动(此时主柴油机与螺旋桨脱开),进行低速航行;轴带电机作为电动机由电网电能驱动。
2.3全电力推进方式
推进电动机通过齿轮箱驱动螺旋桨。柴油机发电机组将机械能转化为电能。螺旋桨专由推进电动机带动。主发电机组除供电给推进电动机外,还通过船舶电网给全船其他设备供电。
各种推进方式有不同的特点,适合不同船型和配置的船舶。由于物探船的功率范围跨度大、工况多,柴油机通过齿轮箱仅驱动调距桨配置,低负荷时柴油机的效率低,新建造的大型物探船上已被上述三种驱动方式取代。
3 机械推进驱动方式
物探船作业工况时,航速低、拖力大,此时主机负荷最大;在正常航行及其他工况时,主机负荷并不大。船用轴带发电机充分利用船舶主推进装置的轴上冗余功率驱动轴带发电机发电,使船舶主机既能在最佳工况运行,又能同时带动轴带发电机发电以满足船舶正常航行的电力需要,从而提供船舶整体运行的经济性。
另外,大功率的工作机械震源空压机在作业工况时也需工作。过去建造的一些物探船上,每台震源空压机由各自的柴油机直接驱动,将会导致震源空压机间温度高,易发生火灾;震源空压机排气管从物探设备甲板上穿出布置也十分困难。随着国际防污染公约排放控制要求的提高,每台震源空压机的柴油机排气需装后处理装置,布置更加困难。震源空压机由电机驱动越来越多,震源空压机若采用变频电机驱动,机舱内除需布置主推进柴油机外,还需布置大功率的柴油发电机组供震源空压机的用电。这样,可节约运行费用及改善机舱管理运行条件的轴带发电装置以其特有的优越性被引入。
3.1带轴发实例及分析
为满足物探船工况多变的要求,多种形式的齿轮箱、调距桨和轴发组成各种形式的推进器。就单根轴系而言,有单机单桨带轴发(1台主机带桨和轴发)、双机单桨带轴发(2台主机带桨和轴发),可带1台轴发,也可带2台轴发。轴发可带在齿轮箱的主动端,也可带在从动端。
通过推进齿轮箱驱动的PTO有两种传动方式:(1)初级传动PPTO(Primary-PTO)
螺旋桨与主机分离时,轴发仍然被驱动。对无离合器的齿轮箱,PTO也被认为是初级传动,轴发带在齿轮箱离合器的驱动端。
(2)次级传动SPTO(Secondary-PTO)
如螺旋桨脱开,轴发也同时脱开,轴发带在齿轮箱离合器的输出端。
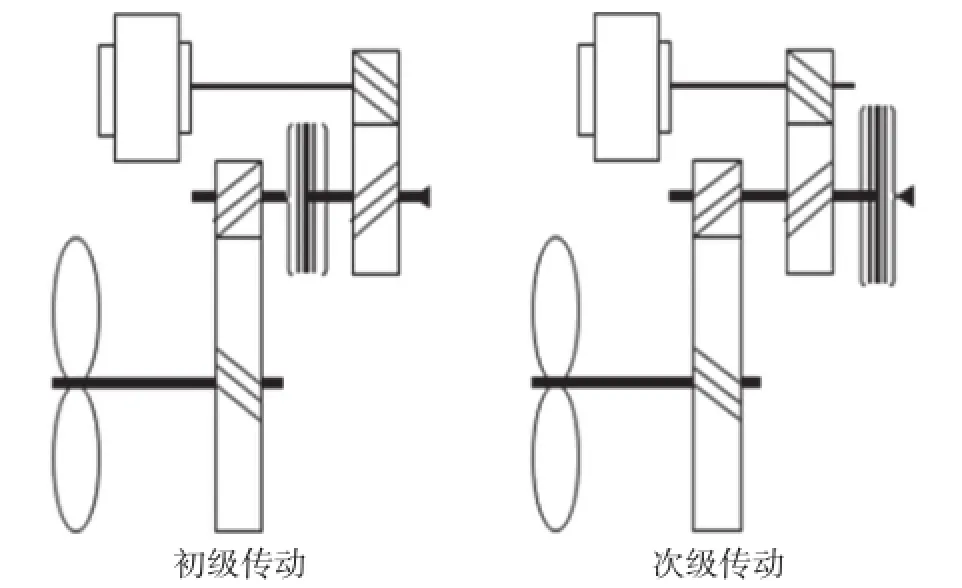
图2 初级传动模式和次级传动模式
采用什么驱动方式来带轴发,应根据各个船的需要。如果轴带电机作为发电机和电动机双重用途,它就应作为次级传动,当主机出现故障,离合器脱开时,电动机可驱动螺旋桨轴,将船舶驶回港。
3.2双机单桨带轴发分析
四机双齿轮箱双轴系驱动调距桨推进方式,即两组双机单桨带轴发配置,在物探船舶上应用较多。每两台柴油机飞轮端分别通过高弹性联轴节,将功率输入一台多功能齿轮箱(配内置式离合器、推力轴和推力轴承),再经轴系与调距桨联接。可一台主机工作也可两台主机同时工作。轴带发电机带在齿轮箱的输入端,为初级传动PTO。驱动轴带发电机功率轴上不设离合器。齿轮箱主推部分的两台主离合器控制每台主机与推进轴系的结合或脱开。
带双台轴发的图3为初级传动(PPTO)模式,即离合器不合排时,两侧主机均可带轴发,作为单独的发电机组。
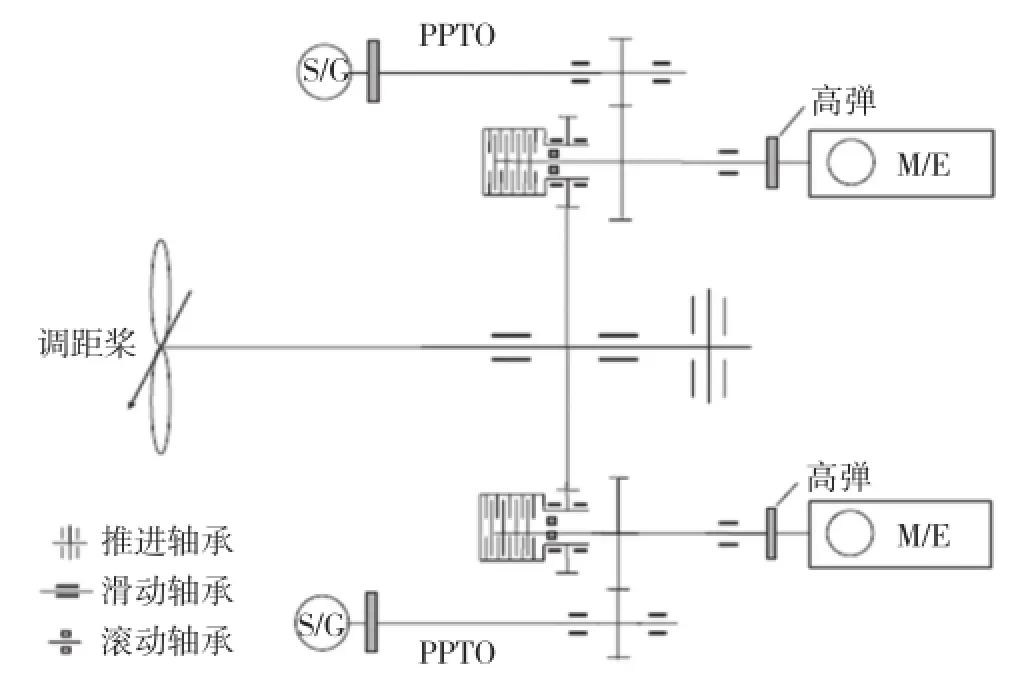
图3 初级传动(PPTO)模式
它可以有多种工况:
(1)左主机带左轴发,右主机带桨、右轴发跟转(右离合器合排)。
(2)右主机带右轴发,左主机带桨、左轴发跟转(左离合器合排)。
(3)左主机带左轴发,右主机不工作。
(4)右主机带右轴发,左主机不工作。
(5)左、右主机同时工作(左、右离合器合排),带两台轴发和桨。
这种配置灵活多变,且基于以下考虑:由于“一拖二”主机带调距桨和轴发的驱动方式,在船舶低航速时,螺旋桨的转速并不能降下来,因为轴发转速必须恒定。为把船速降下来,只有调整螺旋桨的螺距。螺距降低,转速并没降,桨毂对水扰动很大。对于调距桨在零螺距时需消耗主机12%~15%,有些调距桨毂设计大的甚至达到20%。而定距桨是主机直接带螺旋桨,桨的转速随主机转速可调。它在没有推进的情况下,桨转速为0,不消耗功率。所以,同一航速下,船舶在低航速段调距桨所需要的推进功率比定距桨多,其效率比定距桨低。船速在高速段两者比较接近(见图4),四机双桨的推进,船航速低时,将用于推进的主机和带轴发的主机通过齿轮分开,带轴发侧主机离合器不合排,与主推进部分脱离,恒转速运行,作为发电机组用。推进主机侧离合器合排可调速,靠调节主机转速,改变船舶航速,调距桨可当定距桨用。在船舶低航速时,螺旋桨的转速也可以降低,桨毂对水扰动小,是提高效率的很好方法。所以,现在这种多工况的船舶,通过改变齿轮箱的设计,使船舶在各种工况下都能高效率运行。
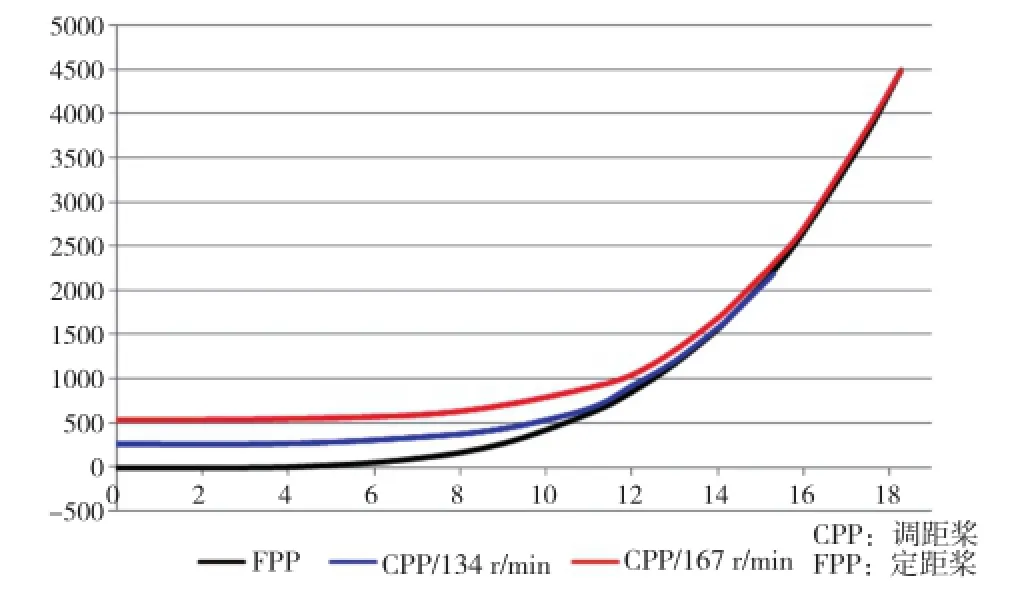
图4 调距桨/定距桨船的航速与桨消耗的功率对比曲线
以上这种双机单桨带轴发的形式对于多种工况的船舶是非常灵活的,一艘双轴系的船共有4台推进主机,它通过不同的组合,2台、3台或者4台主机工作,每台柴油机都能在最佳工况下运行,燃油耗率低。功率选择范围大,在任何时候都能达到功率最佳配置,平均效率高。而且系统的安全裕度高,提高了船舶作业的安全性,增强了船舶生命力。
下页表1中列举了几个典型的机械推进实例。不同的配置形式及功率的大小是根据船舶在各种工况下所需主推功率和电站功率的大小,进行计算、分析比较获得。
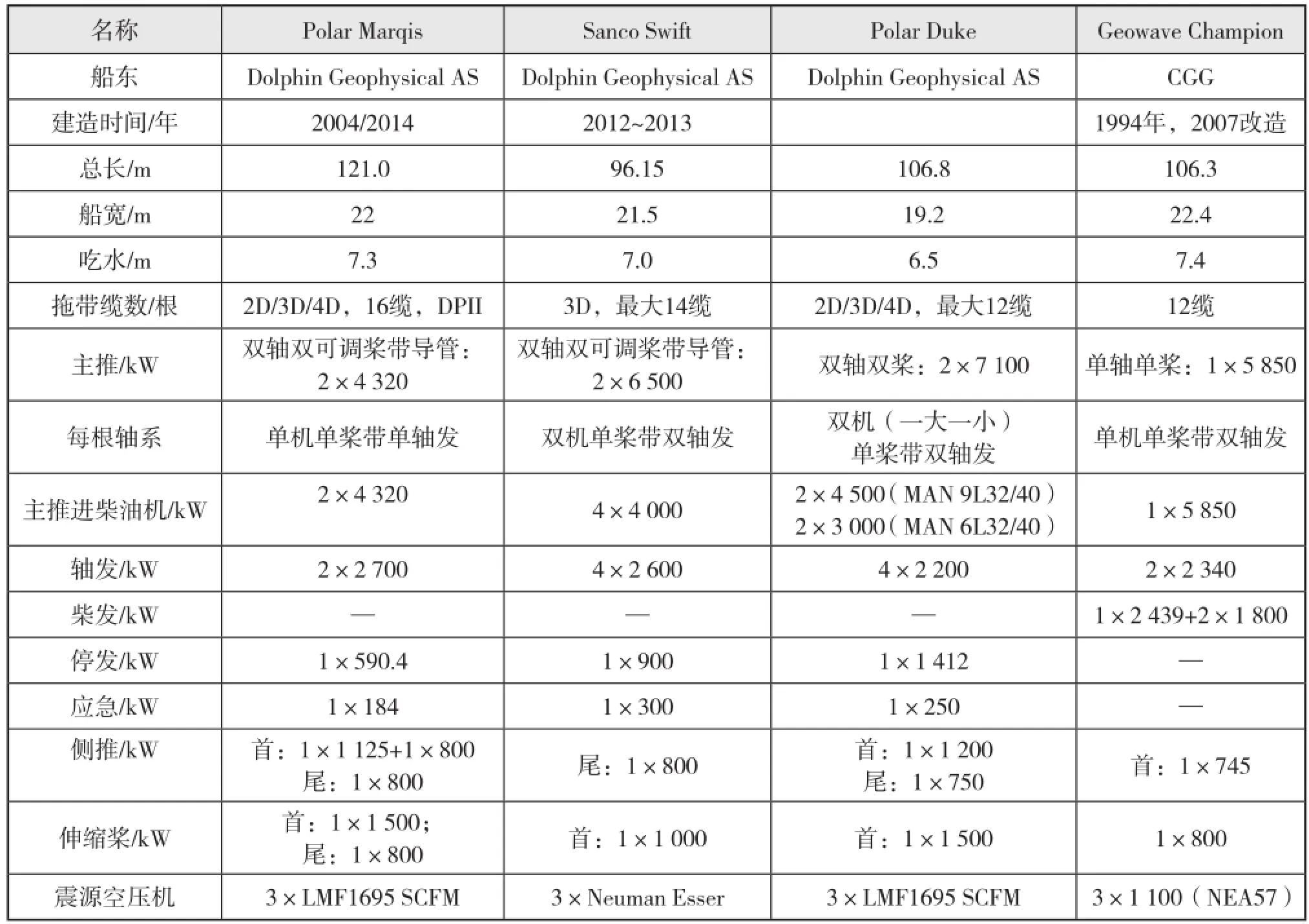
表1 带轴发驱动方式实例
4 全电力驱动推进
4.1全电力驱动推进分析
全电力驱动的推进形式是近十年发展起来并被得到广泛应用的一种推进形式。它是一种由柴油发电机组及配电设备组成电力系统,并通过电动机驱动推进器的推进方式。
电力推进方式的设计理念主要是考虑船舶运营过程中使用大功率电负载的情况较多,且不同时使用。通过不同工况下的电力需求调整在网运行的发电机数量,从而使每台柴油机都能在最佳工况,最低油耗下运行,达到很好的经济效率。
船舶综合电力系统就是将船舶电力系统和船舶电力推进系统两者有机地组合在一起,把动力机械能源转换的电力,通过电站功率管理系统提供给推进设备和船上的其他设备使用,使船舶日用供电和推进供电一体化,实现全船电力的综合利用和统一管理,减少船舶的装机容量,并且在运营过程中柴油机的起停实现自动化[3-4]。尤其对于工况多变的物探船的震源空压机,液压拖带设备需要大量电能,可与电力推进装置一起从主发电机组获得电能。因此,装船动力的综合利用方面更具优越性。
4.2常规电力推进实例
下页表2中的“Geo Caribbean”船以及“Polar Adira”船都是双轴系船舶,“Polar Adira”船是2台电动机通过齿轮箱驱动1根推进轴系。“Ramform Titan-class”为三推进轴系船。下页图5为挪威PGS公司自主设计的Ramform系列第五代宽船尾Ramform W系列,船宽70 m,由日本三菱重工建造,可容纳24~26缆。

表2 电力推进实例

图5 Ramform W
5 柴油机、电力混合驱动
该类型的动力配置为每台主柴油机飞轮端通过1个高弹性联轴节和1台内置摩擦离合器的推进齿轮箱驱动1套可调螺距螺旋桨装置。推进齿轮箱的输出端设有1个动力输出输入轴(PTO/PTI),通过高弹性联轴节驱动轴带电机运行。通常,轴带电机工作在PTO模式,即作为发电机使用。当电站功率富裕或者推进柴油机出现故障,无法正常运行时,轴带电机工作在PTI模式,作为电动机用,从电网供电作为推进助力[5]。
PTO/PTI的推进方式,基于传统的轴带电机系统,无需更多的投入,成本低,附加设备少,操作方便,却较大程度地提高了船舶作业的安全性,增强了船舶生命力,可实现不同作业要求时的多种操纵模式,是非常安全灵活、具有盈余的系统。
下页图6为Rolls—Royce UT830WP项目混合推进动力系统配置图。具体配置及运行工况如下:
(1)配置情况。主柴油发电机2×2 430 kW;推进柴油机 2×4 500 kW;轴带电机(恒频恒速) 2台,PTO输出功率2 400 kW,PTI输入功率2 000 kW;辅机1×900 kW。
(2)运行工况。该船分为航行工况、作业工况Ⅰ、作业工况Ⅱ和电推工况。
5.1航行工况 (轴发模式)
2台主机功率供主推进轴系和轴带发电机。2台轴带发电机供全船用电。1台辅发作为全船供电的备用机。2台主发不工作。
5.2作业工况Ⅰ
2台主机功率供主推进轴系和轴带发电机。2台轴带发电机供全船用电。1台辅发作为全船供电的备用机。2台主发不工作。
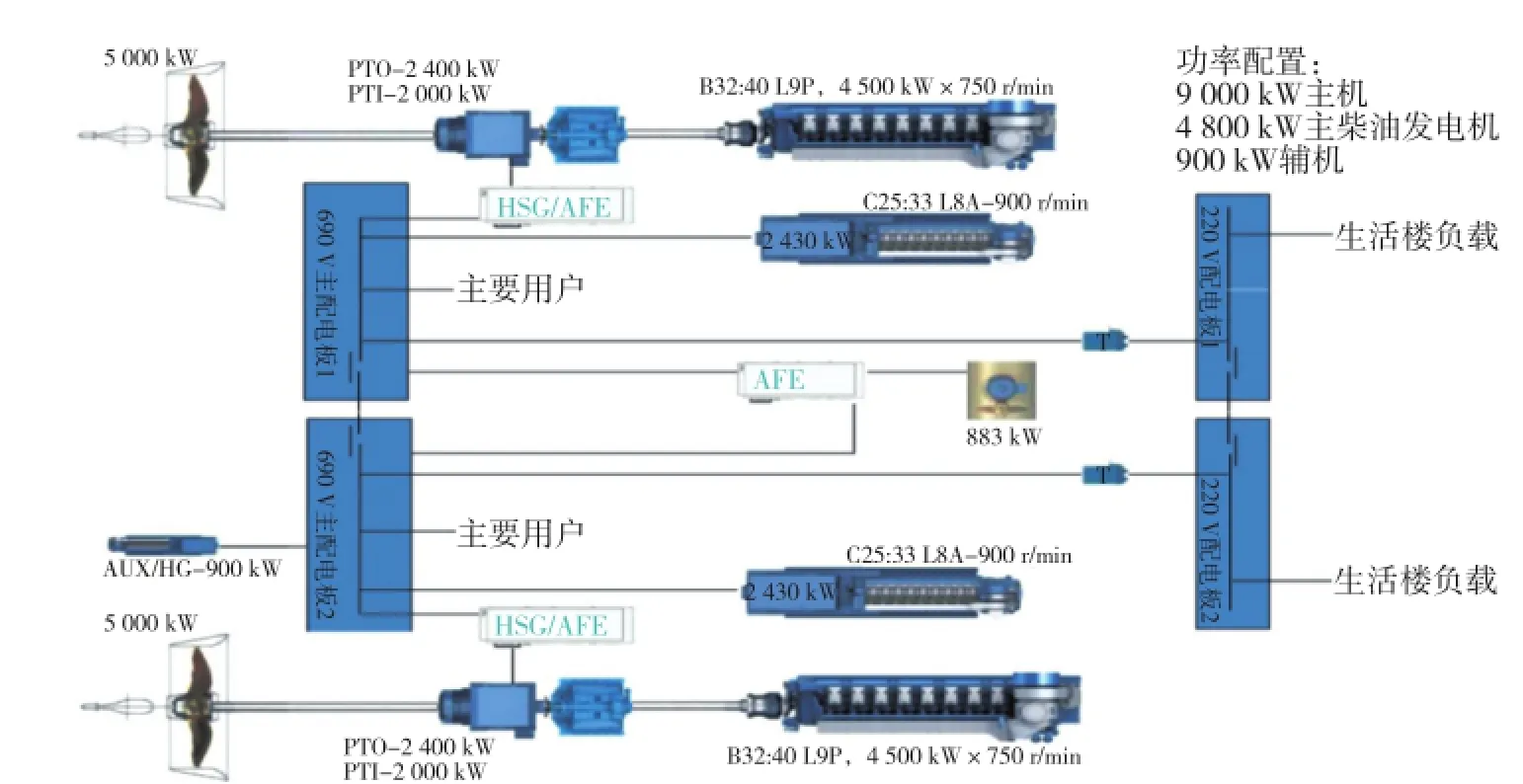
图6 Rolls-Royce UT830WP 配置图
5.3作业工况Ⅱ
2台主机功率供主推进轴系,螺旋桨螺距和转速可调。轴带发电机不工作。1台主发电机和1台辅发电机供全船用电。另1台主发电机作为全船供电的备用机。
5.4电推工况(柴电模式)
2台主发电机和1台辅发电机工作向轴带电机及主配电板供电。轴带电机PTI输入带2个螺旋桨。该工况下的所有用电负载均由主、辅发电机提供。2台主机不工作。
6 物探船典型应用分析
6.1带导管调距桨在物探船上的应用分析
物探船最主要的两个工况为物探作业和自由航行工况。在各种拖力变化前提下的拖航采集作业工况,和非作业时段的海区间迁移往返工况两者之间,应选择拖航采集作业工况作为物探船螺旋桨参数的设计点,即应将提供足够大的拖缆力,与水下噪声指标控制在物探采集作业允许的范围作为首要考虑。同时,在拖缆需要的推进功率范围内,尽量使船舶达到较大的航速。带导管调距桨能更好满足这种变负荷、大拖力工况的要求。虽然调距桨与定距桨相比,由于调距装置复杂,毂径比较大,螺旋桨效率略低3%~4%,但优点在于:
(1)与拖航工况的重负荷匹配时,按照预先设计的螺距比,既可使拖力达到最大,又可使噪声指标控制在采集作业允许的范围。
(2)在非拖航工况时,通过加大螺距(噪声有较大的增加), 将与拖航工况相当的功率充分发挥,达到最大航速。
(3)安装导流罩可提高船舶推力的原理是:由于水流过导流罩前、后的速度变化而引起的压力差作用在导流罩上产生一定的推力。在船舶航行速度很高时,由于对水流的扰动过大,它所产生的阻力会大于增加的推力,所以对于航速要求高的船舶一般不会安装导流罩。物探船航速并不高约为15 kn。为螺旋桨安装导流罩,合理的匹配螺旋桨和导流罩的设计,增加导流罩内水的流速。在相同的主机功率下,可增加5%~10%的船舶推力。在5 kn拖带航速下,拖力提高更多。
6.2动力定位在物探船上的应用分析
国内建造的物探船一般未配动力定位系统。作业时,用导航仪定位,船在航行途中受潮汐、水流影响经常会偏离既定航向,需要操纵人员随时观察进行船位修正。通过查询国外相关资料,挪威Polarcus Limitd大型物探公司, 2012年建造的2艘14缆物探船Adira和Amani以及2010年建造的2 艘12缆物探船Asima和Alima均配有DPⅡ,4艘船均由Ulslein设计。另外,“Polarcus Marquis”轮2000年首制是作为多用途工作船,后于2014年改装成16缆物探船同样具备DPⅡ动力定位系统。我们分析,物探船的推进设备常规配置已基本具备动力定位能力,仅增加1套动力定位电气系统和各推进设备之间的接口即可实现。物探船具备动力定位系统后,船舶可自动修正船位,按预定航线航行,减轻操纵人员工作强度,同时,其功能可进一步扩展,并作为布缆船、平台供应船。动力定位系统在物探船上获得越来越广泛应用,应引起重视和注意。
6.3轴系驱动方式在电推物探船的应用分析
电力推进根据与桨轴的组合形式,可分常规电力推进、吊舱式推进和Z推等;从查找的物探船资料来看,电推的物探船没有使用吊舱式推进和Z推,一般采用常规带轴系螺旋桨的电力推进系统。
分析主要原因是物探船对于船舶的水下噪声要求高,吊舱式推进和Z推在其水下噪声、振动性能方面不及常规轴系推进。吊舱式推进的推进电机在水下,电机的水下噪声会影响物探船回收震源波的精确度,而且常规轴系系统结构简单、技术成熟,在价格方面更具有明显优势。
6.4水下噪声、最大拖力、航行航速间的平衡
船舶拖带航行时,水下噪声对物探船数据采集至关重要。水下噪声过大,影响采集数据的精度,无法进行分析,从中得到海底地质情况。
DNV2014规范中对于其水下噪声测量条件、试验方法、最大噪声等级都有相关要求。
船舶发出的水中噪声量级应在设计拖带工况、100%MCR(螺旋桨功率)、航速为5 kn时测量[6]。
最大噪声等级:
(1)在1/3倍频程段,频率范围3~250 Hz:168 dB re.1 μPa/m(噪声等级测定是参考声压1 μPa,离声源距离1 m条件下测得)。
(2)在频率范围3~300 Hz:175 dB re.1 μPa/m。
当螺旋桨推进功率和噪声指标一定时,将噪声值控制在较小范围内,尽量采用较小螺距、较大直径,减小螺旋桨噪声。换言之,如果要满足对于噪声的控制指标,当直径一定时,对应的螺距也就受到了限制,不能仅靠无限制加大螺距来获得拖力;而当螺距、直径同时受到限制时,拖力就可能不一定满足需要。因此,推进功率、螺旋桨直径、螺距三者之间要同时达到一种平衡,才能满足最大拖缆采集作业工况的需要(实际螺旋桨设计过程,往往在经验与计算的基础上,通过水池试验最终修定相关的参数)。
控制噪声的其他方法还有:在直径一定时增加螺旋桨的叶片数,如四叶改为五叶;螺旋桨的局部形状修正,如对叶梢部位的修正、对于桨叶厚度的修正;采用阻尼材料的螺旋桨,或者是阻尼涂料的螺旋桨等。
7 结 论
物探船的动力配置无论是机械推进、混合推进还是电力推进,各有其优势和不足。动力配置的选择需根据项目的技术形态要求、技术适宜性、初始投资、运营成本(包括设备的维护保养、燃油费以及人员成本等)以及作业可靠性、维护方便性等方面综合考虑,以达到最大经济节能效益。
[参考文献]
[1] 叶锦文,金余.高性能物探船的设计和建造[C].第七届长三角地区船舶工业发展论坛论文集.上海:浙江省科学技术协会,2011.
[2] 胡坚.大功率海工辅助船混合推进装置应用技术研究[J].船舶与海洋工程,2014(3):35-37.
[3] 张元玮,王良秀,王硕丰,等.海洋工程船舶综合电力推进系统关键技术分析[J].船舶工程,2014(3):75-80.
[4] 吴刚.电力推进科考船总体设计要点综述[J].船舶与海洋工程,2013(3):1-5.
[5] 郑文军,聂延生.劳斯莱斯轴带电机的应用及其优越性[J].船电技术,2013(1):53-57.
[6] DNV. Rules for Classification of Ships, Silent Class Notation [S]. 2015.
Collocation of propulsion power system for high-performance seismic vessel
WANG Bo1RAO Guang-long1LI Ming2JIA Xu-dong2
(1. Marine Design & Research Institute of China, Shanghai 200011, China; 2. China Oilfi eld Services Limited, Tianjin 300000, China)
Abstract:The design of a propulsion power system has great influence on the technical performance and cost of seismic vessels. Various propulsion power systems are analyzed and compared, combined with the working characteristics of seismic vessels. It analyzes and compares the propulsion power systems of high-performance seismic vessel operated in the developed countries, and discusses the development trends. It can provide the better directions and concepts for the future design of the propulsion system on the new seismic vessel.
Keywords:seismic vessel; working condition; propulsion system; power collocation
[中图分类号]U664.1
[文献标志码]A
[文章编号]1001-9855(2016)02-0058-08
[收稿日期]2016-01-29;[修回日期]2016-03-08
[作者简介]王 波(1960-),女,高级工程师,研究方向:轮机工程。