BDS三频非差观测数据周跳探测与修复方法*
2016-07-14刘文祥李柏渝孙广富
王 兴,刘文祥,李柏渝,孙广富
(国防科技大学 电子科学与工程学院, 湖南 长沙 410073)
BDS三频非差观测数据周跳探测与修复方法*
王兴,刘文祥,李柏渝,孙广富
(国防科技大学 电子科学与工程学院, 湖南 长沙410073)
摘要:随着三频技术的出现,多频观测量及其丰富的线性组合特性为周跳的探测与修复提供了新的契机。因此提出三频非差观测量线性组合对载波相位观测数据中周跳进行实时探测及修复的方法。该方法构造无几何无电离层的码相组合,并通过对历元间的电离层延迟变化量进行实时估计与消除,构造出第三组线性无关的周跳探测量。用30 s采样间隔的北斗三频实测数据对算法性能进行验证,试验结果表明:该方法可以有效地对各频点的周跳实现探测与修复,即使在电离层活跃的应用场景中,该方法依然具有较好的性能。
关键词:北斗导航卫星系统;三频非差观测数据;周跳;电离层活跃场景
2012年12月27日北斗卫星导航系统(BeiDou navigation satellite System, BDS)正式开始试运行,为我国及其周边地区提供连续的导航定位和授时服务。BDS卫星播发三个频点导航信号,中心频率分别为B1(1561.098 MHz),B2(1207.140 MHz)以及B3(1268.520 MHz)[1]。
随着三频及多频技术的发展,多频观测量线性组合可以提供更多波长更长、电离层延时影响更弱、组合噪声更小的组合观测量,便于载波相位整周模糊度的固定[2]和周跳的探测与修复[3]。利用多频技术实时对载波相位观测量中的周跳进行探测与修复也成为研究的热点。Dai等[4-5]提出利用两组几何无关(geometry-free)的载波相位组合实时探测周跳,并利用整数最小二乘降相关平差法来搜索周跳大小并完成修复。de Lacy 等[6]利用至少5组geometry-free载波相位线性组合逐级对观测数据中的周跳进行探测与修复,然而,该算法流程及逻辑较为复杂。而且,上述两种算法的验证均采用仿真生成的全球定位系统(Global Positioning System, GPS )三频数据,并无实测数据支撑。Zhao等[7]给出了一种通过三频非差观测数据线性组合,进而递推探测超宽巷、宽巷和窄巷观测量中周跳的算法,并利用BDS和GPS三频实测数据对算法性能进行了验证。Zhang等[8]通过历元间单差的几何相关(geometry-based)观测模型将接收机位置、接收机钟差、大气延迟误差以及周跳等作为待估计参数进行实时计算,并给出了实测数据的验证结果。但是,上述方法均假定历元间的电离层延迟变化十分缓慢,对周跳探测的影响可被忽略。然而,随着观测数据采样间隔的增大,特别是在电离层活跃的时间段及区域,如我国中低纬度地区,部分时间段的电离层电子的变化率可达到 0.03 TECU/s[9],对应于30 s采样间隔的观测数据,其历元间电离层延迟变化量可达数十厘米,严重影响到周跳探测与修复的准确性和可靠性。针对这一问题,Cai等[10]利用前后滑动窗的Melbourne-Wübbena组合及载波相位无几何组合的两次历元差分对电离层活跃模型下的双频GPS非差观测数据中的周跳进行探测。黄令勇等[11]将上述方法扩展至三频系统,提出了一种顾及电离层延迟的三频TurboEdit方法。但是,由于载波相位无几何组合对应的周跳探测量会受电离层延迟误差的影响,而且组合后模糊度的整周特性会丢失,因此,该类算法的周跳数值的确定过程常需要采用整数最小二乘搜索,计算复杂度高且结果不稳定。为了进一步发挥BDS三频技术在周跳探测与修复方面的优势,有必要进一步研究消除电离层延迟误差影响的三频非差观测数据周跳探测与修复技术,以适应未来BDS应用的需要。因此,本文构造了多组无几何无电离层延迟(Geometry-Free-Ionospheric-Free, GIF)码相组合。
1GIF码相组合及其周跳探测性能
1.1基本观测方程及其线性组合
利用f1,f2,f3分别表示北斗B1,B2,B3频点的载波频率,则伪距及载波相位的基本观测方程[9]可表示为:
Pi=ρ+qiI1+εPi
(1)
Φi=ρ-qiI1-λiNi+εΦi
(2)
三频geometry-based模型的载波相位线性组合[2]可表示为:
(3)
其中,组合系数i,j,k为整数。组合后载波的波长和整周模糊度分别为:
(4)
N(i,j,k)=i·N1+j·N2+k·N3
(5)
β(i,j,k)为组合后的电离层延迟系数,可表示为:
(6)
1.2三频GIF码相组合
通过三频伪距与载波相位的线性组合,可以消除几何距离相关项、电离层延迟误差一阶项等因素的影响,进而构造出GIF码相组合。
(7)
其中:c1,c2,c3为伪距观测量组合系数;εP(c1,c2,c3)为组合后的伪距观测噪声。由于伪距观测噪声的量级远大于载波相位观测噪声,因此,GIF码相组合的精度主要由伪距观测噪声精度决定。约束GIF码相组合后的伪距观测噪声方差最小,同时满足无几何无电离层延迟的条件,即伪距组合系数的约束条件为:
(8)
1.3周跳探测性能
由于GIF码相组合既消除了几何距离相关项,又消除了电离层延迟误差的影响,因此可通过在两个连续的观测历元之间作差来对组合观测量中的周跳进行探测。
(9)
其中,Δ表示历元间差分。GIF码相组合周跳探测量的标准差为:
(10)
周跳值可通过取整的方式确定:
(11)
其中,[ ]round表示“四舍五入”取整。此时,周跳探测的概率仅与GIF码相组合的观测噪声方差相关,可利用正态分布的概率密度函数计算。
(12)
假定BDS三个频点的载波相位观测噪声满足σΦ1=σΦ2=σΦ3≡σΦ=0.25cm;伪距观测噪声满足σP1=σP2=σP3≡σP=0.25m。表 1给出了部分BDS三频GIF码相组合周跳探测量的探测性能。可以看出GIF码相组合的周跳探测概率比较高,可达到92%以上。但是受伪距观测噪声的影响,除ΔN(0,-1,1)以外,其他组合的周跳探测概率很难达到100%。图1以ΔN(1,1,-2)为例,展现了σΦ=0.25cm时,GIF码相组合周跳探测量的探测概率受伪距观测量精度的影响程度。
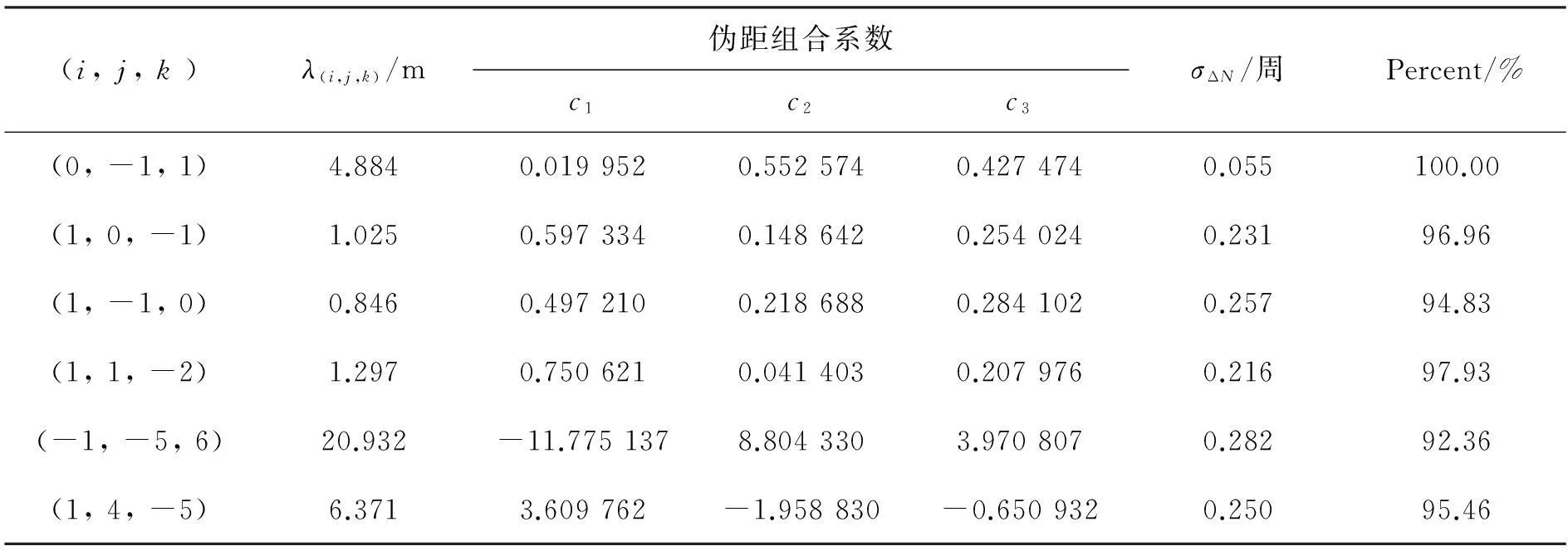
表1 BDS三频GIF码相组合的周跳探测性能
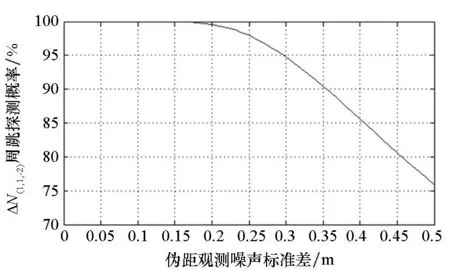
图1 伪距观测量精度对ΔN(1,1,-2)周跳探测概率的影响Fig.1 Influence of pesudorange observationalprecision on detection probability of ΔN(1,1,-2)
由图1可知,随着伪距观测量精度的降低,GIF码相组合周跳探测量的探测概率也会随之降低。在实际应用时,可通过适当地加窗平滑或者增大卫星观测的截止高度角等来降低伪距观测噪声,进而提高GIF码相组合的周跳探测性能。
2消除电离层延迟的周跳探测方法
为了实现原始载波相位观测量的周跳探测与修复,需要至少三组线性无关的组合周跳探测量。表1给出的周跳探测量对应的载波相位组合系数均满足i+j+k=0。而满足i+j+k≠0条件的GIF码相组合的测量噪声方差非常大,周跳探测性能较差。为此,需要利用其他方式构造第三组线性无关的周跳探测量。
2.1消除电离层延迟误差影响的周跳探测量
当存在两组无周跳或已经修复周跳的载波相位组合时,如:Φ(0,-1,1)和Φ(1, 1,-2),可通过这两组观测量的线性组合,同时消除历元间电离层延迟变化量,构造第三组线性无关的周跳探测量:
(13)
其中,ΔI1为连续观测历元之间的电离层延迟变化量。可利用原始载波相位观测数据在频间及历元间作差进行实时估计,得到:
(14)
其估计标准差为:
(15)
通常采用B1与B2组合或者B1与B3组合来对ΔI1进行估计,对应的估计标准差分别为2.97σΦ和3.89σΦ。

(16)
(17)

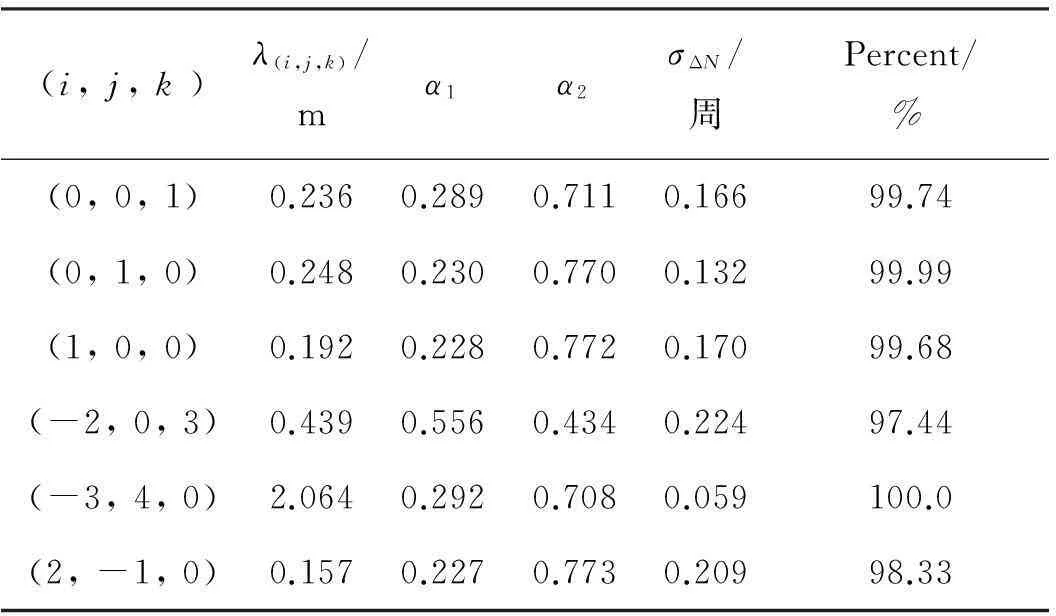
表2 消除电离层延迟误差影响的周跳探测量
2.2周跳对ΔI1估算的影响及其修正
式(13)通过对载波相位观测量在历元间作差消除整周模糊度,进而对历元间电离层延迟变化量进行估计。然而,该估计量会受到原始载波相位观测量中周跳的影响,当存在周跳时,ΔI1的估计值会产生较大偏差,进而使消除电离层延迟误差影响的周跳探测量的探测性能变差。
但是,当存在特殊周跳组合时,即ΔN1=ΔN2=ΔN3,上述GIF码相组合周跳探测量无法对该类周跳实现探测。为此,对电离层延迟误差进行两次历元差分,即:
(18)
(19)
(20)

2.3原始载波相位观测量中周跳的确定及修复
(21)
由于上述三个组合周跳探测量的周跳探测结果以及线性变换矩阵的系数均为整数,因此,最终求解得到的原始载波相位观测量的周跳数值也保持整数特性。
3实例分析

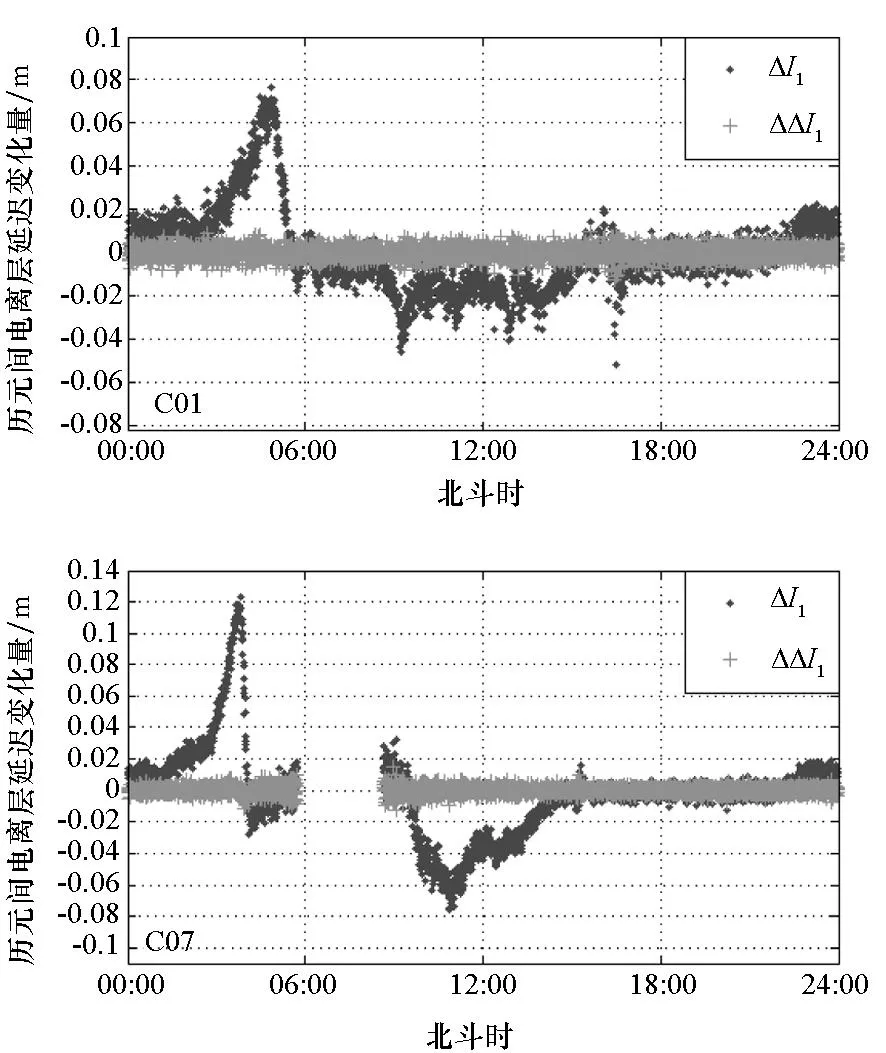
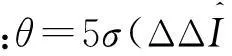
图2 C01和C07卫星的电离层延迟变化量Fig.2 Ionospheric delay variation for C01 and C07
由图2可知,当日kun1观测站受电离层延迟影响较为显著,特别在北斗时(BeiDou Time, BDT)03:00~05:30对应的时间段内, C07卫星的历元间电离层延迟变化量达到0.12 m左右, C01卫星的历元间电离层延迟变化量也接近0.08 m。而电离层延迟误差的二次历元差变化十分缓慢,波动范围小于±0.02 m,所以可用于判断原始观测数据中是否存在ΔN1=ΔN2=ΔN3的特殊周跳组合。
为了对比分析历元间电离层延迟变化对周跳探测的影响,图3给出了C01和C07卫星观测数据无周跳时,消除及未消除电离层延迟误差影响的周跳探测量ΔN(-3,4,0)的周跳探测值。
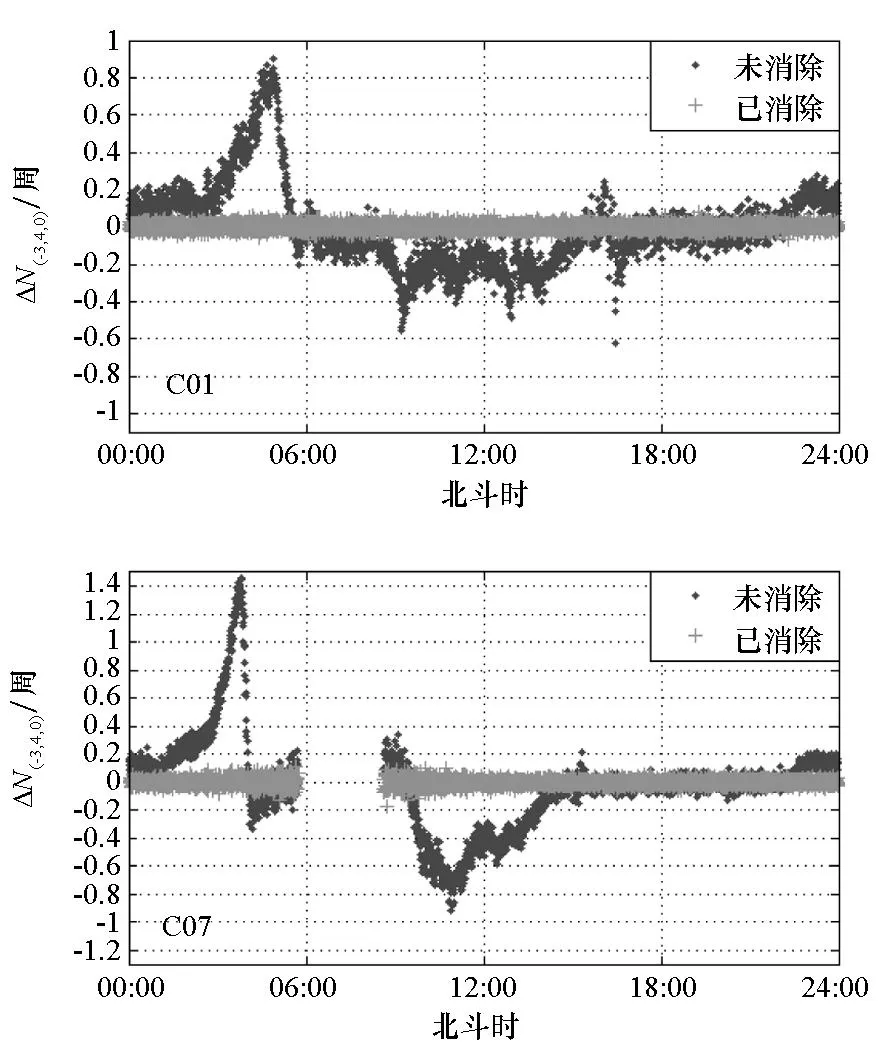
图3 C01和C07卫星历元间电离层延迟误差对周跳探测量ΔN(-3,4,0)的影响Fig.3 Influence of ionospheric delay variation onΔN(-3, 4,0)for C01 and C07
由图3可知,周跳探测量ΔN(-3,4,0)受历元间电离层延迟误差变化量的影响较为显著。特别是在BDT 03:00~05:30这段时间内,未消除历元间电离层延迟误差影响的周跳探测量ΔN(-3,4,0)幅度超过了0.5周,C07卫星的甚至达到1.4周以上,会出现周跳误判。而消除电离层延迟误差影响的周跳探测量ΔN(-3,4,0)的探测值幅度始终小于±0.2周,较为稳定,未受到历元间电离层延迟变化的影响,可以在电离层较为活跃的应用场景中实现周跳的正确探测。
为了进一步验证三频非差观测数据周跳探测及修复算法性能,分别在C01和C07卫星的载波相位观测数据中的前660历元中加入不同的周跳组合,见表3。图4给出了三组线性无关的周跳探测量ΔN(0,-1,1),ΔN(1,1,-2)以及ΔN(-3,4,0)对应的周跳探测值。由表3、图4可知,三频非差周跳探测与修复算法可以正确地探测所有频点、不同周跳类型(小周跳、大周跳、特殊周跳组合)的周跳。同时,该算法消除了历元间电离层延迟误差变化对周跳探测的影响,在数据采样间隔较大以及电离层活跃的应用场景中,仍具有较好的周跳探测与修复性能。同时需要指出,周跳探测量ΔN(1,1,-2)易受到伪距测量噪声的影响,特别是在600~660历元对应的观测时间段内,随着C07卫星仰角的减小,伪距及载波相位观测噪声明显增大,部分历元会超过周跳判决门限,出现周跳误判的情况。此时,需要加窗平滑3~5个历元以及增大该卫星观测的截止高度角,来消除周跳误判的出现。
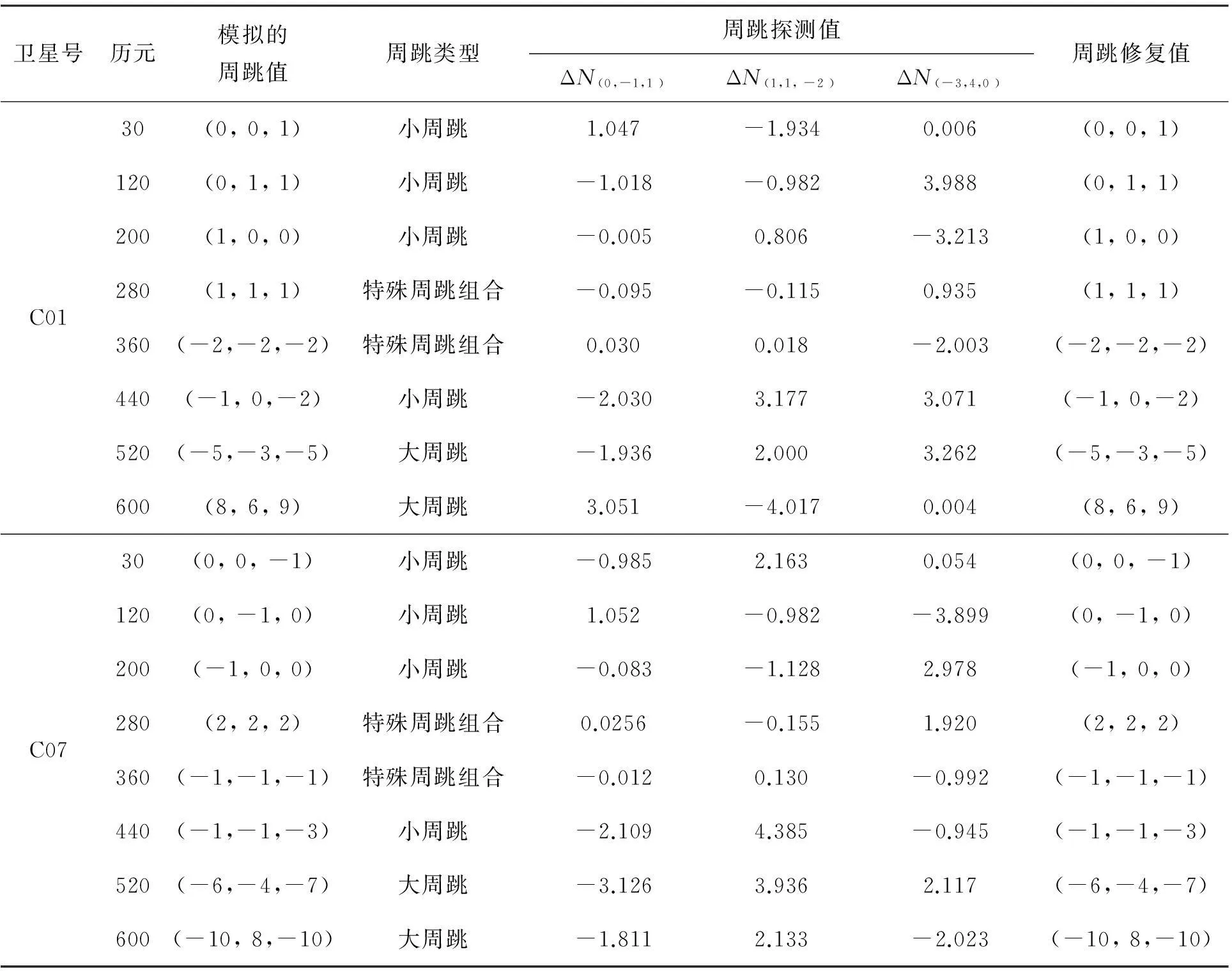
表3 周跳探测与修复结果
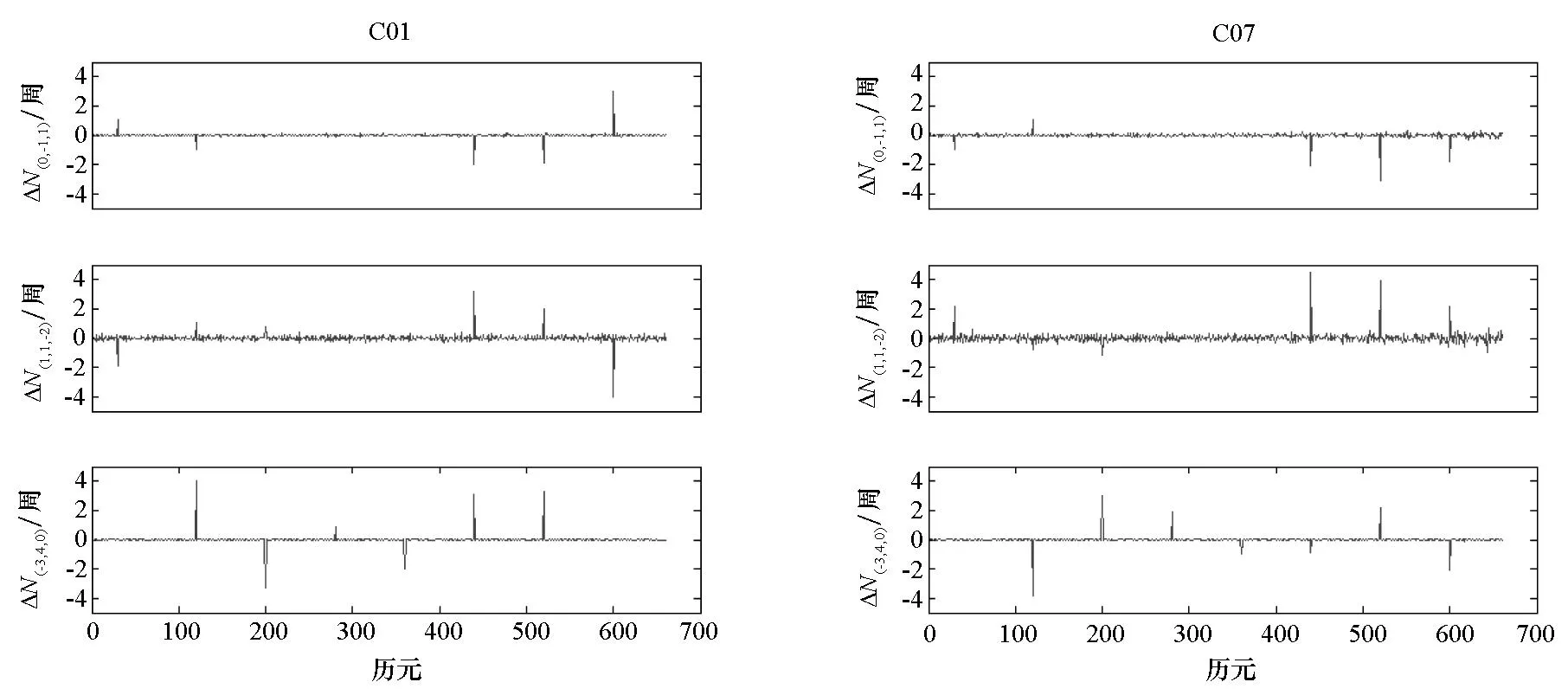
图4 C01与C07卫星的周跳探测结果Fig.4 Detection results of simulated cycle slips for C01 and C07
4结论
通过构造无几何无电离层延迟的码相组合以及消除电离层延迟误差影响的周跳探测量,给出的三组线性无关的周跳探测量,均消除了历元间电离层延迟变化对于周跳探测的影响。利用BDS三频实测数据对算法性能的验证表明:该方法可以对BDS三频非差观测数据各频点中的周跳实现有效的探测与修复,可适用于观测数据采样间隔较大以及电离层活跃的应用场景。
参考文献(References)[1]谭述森, 周兵, 郭盛桃, 等. 中国全球卫星导航信号基本框架设计[J]. 中国空间科学技术, 2011, 31(4): 9-14.
TAN Shusen, ZHOU Bing, GUO Shengtao, et al. Studies of COMPASS navigation signals design[J]. Chinese Space Science and Technology, 2011, 31(4): 9-14. (in Chinese)[2]Feng Y M. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals [J]. Journal of Geodesy, 2008, 82(12): 847-862.
[3]范建军, 王飞雪, 郭桂蓉. GPS三频非差观测数据周跳的自动探测与改正研究[J]. 测绘科学, 2006, 31(5):24-26.
FAN Jianjun, WANG Feixue, GUO Guirong. Automated cycle-slip detection and correction for GPS triple-frequency undifferenced observables[J]. Science of Surveying & Mapping, 2006, 31(5): 24-26. (in Chinese)
[4]Dai Z, Knedlik S, Loffeld O. Real-time cycle-slip detection and determination for multiple frequency GNSS[C]//Proceedings of 5th Workshop on Positioning, Navigation and Communication, 2008: 37-43.
[5]Dai Z, Knedlik S, Loffeld O. Instantaneous triple-frequency GPS cycle-slip detection and repair[J]. International Journal of Navigation and Observation, 2009: 407231.
[6]de Lacy M C, Reguzzoni M, Sansò F. Real-time cycle slip detection in triple-frequency GNSS[J]. GPS Solutions, 2012, 16(3): 353-362.
[7]Zhao Q L, Sun B Z, Dai Z Q, et al. Real-time detection and repair of cycle slips in triple-frequency GNSS measurements[J]. GPS Solutions, 2015, 19(3): 381-391.
[8]Zhang X H, Li P. Benefits of the third frequency signal on cycle slip correction[J]. GPS Solutions, 2015: 1-10.
[9]Liu Z Z, Wu C. Study of the ionospheric TEC rate in Hong Kong region and its GPS/GNSS application[C]// Proceedings of the International Technical Meeting on GNSS Global Navigation Satellite System—Innovation and Application, Beijing, 2009: 129-137.
[10]Cai C S, Liu Z Z, Xia P F, et al. Cycle slip detection and repair for undifferenced GPS observations under high ionospheric activity[J]. GPS solutions, 2013, 17(2): 247-260.
[11]黄令勇, 翟国君, 欧阳永忠, 等. 削弱电离层影响的三频 TurboEdit 周跳处理方法[J]. 测绘学报, 2015, 44(8): 840-847.HUANG Lingyong, ZHAI Guojun, OUYANG Yongzhong, et al. Triple-frequency TurboEdit cycle-slip processing method of weakening ionospheric activity[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(8): 840-847. (in Chinese)
[12]Eueler H J, Goad C C. On optimal filtering of GPS dual frequency observations without using orbit information[J]. Bulletin Geodesique, 1991, 65(2): 130-143.
Detection and repair of cycle slips for undifferenced BDS triple-frequency observations
WANG Xing, LIU Wenxiang, LI Baiyu, SUN Guangfu
(College of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073)
Abstract:The presence of the new frequency introduces more observations and degrees of freedom in data combination, which is beneficial for cycle-slip detection and repair. A novel real time cycle-slip detection and repair method based on undifferenced triple-frequency observations was proposed. This method employed two groups of geometry-free and ionosphere-free combinations of code and carrier phase observables, and constructed the third linearly independent detector for cycle-slip by eliminating the ionospheric delay variation between two consecutive epochs. The performance of the proposed method was validated with BeiDou triple-frequency observations with 30 s sampling interval. Results show that this method can effectively detect and correct the cycle slips on each frequency, even under high ionospheric activity condition.
Key words:BeiDou navigation satellite system; undifferenced triple-frequency observations; cycle slip; high ionospheric activity
doi:10.11887/j.cn.201603003
收稿日期:2015-12-30
基金项目:国家自然科学基金资助项目(61403413)
作者简介:王兴(1986—),男,甘肃庆阳人,博士研究生,E-mail:wangxing-1010@163.com; 孙广富(通信作者),男,研究员,博士,博士生导师,E-mail:sunguangfu_nnc@163.com
中图分类号:P228.41
文献标志码:A
文章编号:1001-2486(2016)03-012-07
http://journal.nudt.edu.cn
