AGV+工业机器人在精密搬运中的应用
2016-07-13任云星马世杰
任云星,马世杰
(中国电子科技集团公司第二研究所,山西 太原 030024)
AGV+工业机器人在精密搬运中的应用
任云星,马世杰
(中国电子科技集团公司第二研究所,山西 太原 030024)
摘要:AGV以其适应性好、柔性程度高、可靠性好、可实现生产和搬运功能的集成化和自动化等优点,广泛的应用于柔性制造系统中。目前国内研制的AGV定位精度只能达到±10 mm,难以满足精密搬运场合中物料的定位需求。针对此,本文在AGV小车上加装工业机器人以及机器视觉系统,在AGV定位完成后,再利用视觉系统读取AGV的定位偏差,最后通过工业机器人的补偿运动来提高整套搬运系统的定位精度。经过实际测试, AGV自动搬运系统的定位精度可以达到±0.5 mm,开拓AGV在精密搬运中的应用。
关键词:AGV;工业机器人;视觉系统;精密搬运
智能制造技术、工厂物流自动化是目前国内外极受重视的新技术应用领域。柔性加工、柔性装配、仓储物流智能化是其中的重要组成部分,自动导引小车AGV(Automated Guided Vehicle)则是其中不可或缺的关键设备和系统技术[1]。在全球范围内,近几年AGV技术有了很大的发展,进一步促进了先进的柔性生产线以及自动化物流系统的实现。国外发达国家中美国、日本、德国、瑞典研发AGV多年,其AGV种类齐全,技术水平处于领先地位。国内AGV研究起步较晚,近年来AGV技术陆续取得一些突破,已开发出具有自主知识产权的AGV机器系统技术,获得多项专利,并在实际应用中取得良好的效果。
AGV系统具备以下主要特点[2]:便于和各种工业机器设备、数控加工中心配合作业;实现对物流的一体化控制;使生产线的设备具有很大的灵活性,便于重新布置和调整;可方便地跨越故障工位或离线待命,保证生产线的连续运转;相对于固定的物料输送线,在占地最小的情况下,具有最大的交叉能力;灵活、及时的物料运输提高了设备的利用率。
通过工业机器人与AGV的结合,组成AGV自动搬运系统。一方面可以利用工业机器人来补偿AGV定位精度低的问题,另一方面可以利用工业机器人来进行物料的取放,不需要在每个AGV的工作位置安置机械手来进行物料的转移,提高整套搬运系统的柔性,并降低AGV的使用成本。
1AGV自动搬运系统的组成
AGV自动搬运系统由AGV小车、工业机器人、视觉系统、物料抓取夹具组成。结构如图1所示。

图1 AGV搬运系统结构示意图
1.1AGV小车的结构
本次试验采用的AGV以蓄电池为动力,装备电磁自动导航装置,能够自主定位,可以接收任务并自动执行任务。AGV主要结构包括以下几个部分:
1) 车身:试验AGV车身采用Q235钢结构件,车身重量为240 kg,这使得AGV有充足的抓地力和坚固的车体。AGV的车体外壳设计圆润,避免使人受伤,电控箱和蓄电池等关键部件都用橡胶隔垫进行隔离减震。
2) 导航定位系统:导航定位系统相当于AGV的眼睛,用于AGV运动过程中的定位[3]。目前成熟的导航方式为电磁导航和激光导航。电磁导引的导引原理简单而可靠,便于控制和通讯,对声光都无干扰,制造成本较低,适用大多数环境。试验AGV采用电磁导引。
3) 运动系统:AGV的运动系统包括车轮、减速器、电机、伺服控制器、调速器组成,是一个伺服控制系统[4]。试验AGV采用双轮差速驱动式,可以实现AGV的前进、后退、原地转向。
4) 防碰撞机构:AGV作为自动化机器人的一种,安全措施至关重要,必须保证AGV在运行过程中的自身安全,以及现场生产的安全和人员及各类设备的安全。试验AGV上安装有非接触式红外探测传感器和接触式碰撞传感器,一旦AGV遇到障碍物,AGV自动进行声光报警并立刻停止运动等待处理。
5) 电源系统:试验AGV采用200AH/48 V铅酸蓄电池给AGV供电,并通过24 V~AC220 V逆变器为工业机器人以及视觉系统提供电源。
6) 控制与通讯系统:AGV控制系统一般包括车载控制器和中央控制器两部分,两部分之间通过通讯系统通讯,通讯系统采用无线通信方式。中央控制器负责任务调度,路径规划和交通控制,车载控制器负责完成AGV的任务执行,运动、导航、传感器、安全等各方面的控制。

图2 AGV小车的结构示意图
1.2AGV小车的路径规划
AGV搬运系统的目的在于提高AGV定位精度,要求AGV运行路径设计中包含AGV 的前进、后退、原地转弯动作,测试AGV在完成这些动作后的定位精度。
试验中AGV的路径如图3所示。AGV运行路径为环形,设置两个直角转弯,两个不同半径的圆弧转弯,其余部分为直线段。
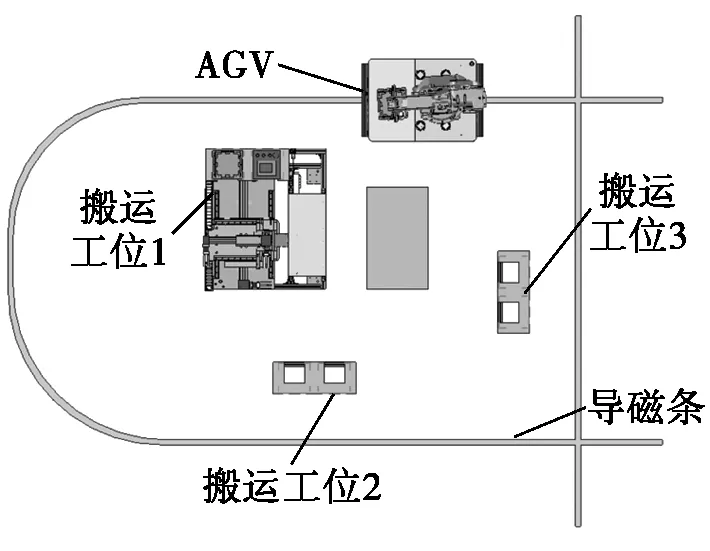
图3 AGV运行路径
1.3工业机器人
工业机器人采用YASKAWA六轴多关节搬运机器人,负载为20 kg,工作半径为1 717 mm,本体质量为268 kg,控制柜为F100型机器人重复定位精度达到±0.08 mm。机器人通过开放TCP/IP端口,开发相应的通讯协议,使得机器人可以直接读取视觉系统的输出数据,并作相应动作。
1.4视觉系统
视觉系统安装在物料夹具上,采用200万像素的OMRON工业相机FZ系列,并搭载SV-2514H镜头,视觉系统的精度为±0.2 mm,角度误差为±0.3°。
1.5物料夹具
物料由水平运动的夹爪进行夹取,夹爪设置卡位槽,保证夹取精度。夹爪的动作由电动执行器驱动,保证两侧夹爪同时动作,并且夹取位置可调。
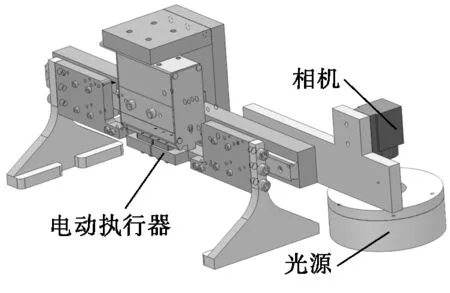
图4 物料夹具示意图
2AGV搬运系统的建立与测试
2.1AGV搬运系统的建立流程
1) 建立AGV的运动站点数据,使得AGV可以接受中央控制器的动作指令,完成AGV在规划路径中3个工位的停靠,并且可以在任意两个工位之间运动。
2) 对各工位进行机器人的物料取放动作进行示教,并建立机器人与AGV的通讯,使得机器人可以在每个站点做相应的物料取放动作。
3) 在每个站点物料的取放位置设置标记点,利用视觉系统对标记点进行读取,并根据定位要求对视觉系统进行编程和数据处理。
4) 建立视觉系统与工业机器人的数据通讯。
5) 通过对机器人工具坐标系的标定,建立机器人、相机、夹具的相对位置关系,并将数据输入视觉系统。
6) AGV搬运系统构建完成。
2.2AGV搬运系统的工作流程
1) 中央控制器发送指令给AGV, AGV运动到指定工位。
2) 工业机器人根据工位信号做出相应的搬运姿态,移动到位后给视觉系统发出拍照信号。
3) 视觉系统对目标工位上的标记点进行采样,并计算AGV的定位偏差,最后将偏差数据发送给工业机器人。
4) 工业机器人根据偏差重新建立工作坐标系,在新坐标系下完成补偿动作,以及取料、放料动作。
2.3AGV搬运系统的精度测试
为方便测试AGV系统搬运精度,在所有工作位台面上铺设一张白纸,调整台面至水平。在工业机器人末端安装一个100×100×50的铝制方块,测试过程如下:
1) 对每一个工作位,AGV首次移动到位以后,机器人移动到搬运位,将铝块放置在白纸上,人工在白纸上对铝块直角边进行划线。
2) 中央控制器命令AGV走到其他工作位,机器人做出相应动作,视觉系统拍照,机器人进行位移补偿,然后将铝块放置在台面上,人工进行直角边划线。
3) 重复以上动作20次,测量所有线条之间的最大距离,以及最大角度。
4) 试验证明,AGV定位系统在水平方向直线偏差最大值0.5 mm,即定位精度为±0.5 mm,试验中角度偏差小于0.01度,认为角度没有偏差。
3设备应用前景
智能制造是新一轮工业革命的核心,要实现“中国制造2025”制定的目标,智能制造是中国制造业的下一个主攻方向。柔性制造作为智能制造的基石更是重中之重。本文所设计的AGV搬运系统显著特点是无人驾驶,可以保障系统在不需要人工导航的情况下自动行驶,柔性好,自动化和智能化水平高。AGV搬运系统可以根据仓储货位要求、生产工艺流程等改变而灵活配置,并且运行路径改变的费用与传统的输送带或刚性的传送线相比非常低廉[5]。AGV搬运系统还可以与其他物流设备自动接口,实现货物或物料装卸与搬运全过程自动化。此外,还具有清洁生产的特点,AGV依靠自带的蓄电池提供动力,运行过程噪声极低、无污染,可以应用在许多要求工作环境清洁的场所。
4结束语
AGV自动搬运系统由于定位精度提高,可以适用大多数精密搬运场合,显著提高搬运过程的柔性化、智能化,为中国制造下一步发展提供助力。
参考文献
[1]Tuan Le-Anh* M B M,De Koster.A Review of Design of Automated GuidedVehicle Systems[G].European Journel of Operational Research,2006:171.
[2]Brett Peters,Jeffrey Smith,Venkatesh.A Control Classification of Automated Guided Vehicle Systems[J].International Journal of Industrial Engineering,1996,3(1):29-39.
[3]徐广明,杨伟红,刘克铭.基于PLC的车间运输小车的自动控制系统设计[J].世界科技研究与发展,2009,31(4):663-665.
[4]胡克维.自动导引小车AGV的导航和避障技术研究[D].浙江大学,2012.
[5]李乐军,施业琼,韦宝秀.关于AGV及其在中国的应用发展探析[J].科技自寻,2007(34):154-155.
Application of AGV & Industry Robot in Precision Handling
Ren Yunxing, Ma Shijie
(The2ndResearchInstituteofCETC,TaiyuanShanxi030024,China)
Abstract:AGV has the advantages of good adaptability, high flexibility, good reliability, and can realize the integration and automation of production and transportation functions, so it is widely used in the flexible manufacturing system. At present, the AGV positioning accuracy in domestic development can only reach about ±10 mm; it is difficult to meet the requirements of the location of the material in the precision handling. In response to this situation, this paper, by installing the industrial robot and machine vision system in AGV, after AGV positioning, the position deviation of the AGV is read by the visual system. In the end, the positioning accuracy of the whole system is improved by the compensation movement of the industrial robot. Through the actual test, the positioning accuracy of the whole AGV system can reach to ±0.5 mm, so that AGV can be used in precision handling.
Key words:AGV; industry robot; vision system; precision handling
收稿日期:2016-04-06
作者简介:任云星(1987- ),男,山西吕梁人,硕士研究生,研究方向:太阳能及半导体电子自动化设备的研发。
文章编号:1674- 4578(2016)03- 0051- 02
中图分类号:TP242.2
文献标识码:A
