基于DSP/FPGA的高速旋转体姿态角及转速的解算系统设计
2016-07-13沈怀营吴伯农王帅辉
沈怀营,吴伯农,王帅辉
(北方工业大学 机械与材料工程学院,北京 100144)
基于DSP/FPGA的高速旋转体姿态角及转速的解算系统设计
沈怀营,吴伯农,王帅辉
(北方工业大学 机械与材料工程学院,北京 100144)
摘要:传统的陀螺仪动态范围小、精度低、抗冲击能力差,很难达到惯性导航的目的。因此,设计了一种基于线性加速度计(ADXL193)及磁阻传感器(HMC1043)为惯性测量单元的转速及姿态角解算系统。该系统运用FPGA协处理器控制ADC芯片完成12路模拟信号的同步转换,并将转换后的数据缓存;最终由DSP芯片TMS320C6713主处理器完成姿态角及转速的实时解算。
关键词:惯性导航;转速及姿态角解算;ADXL193;TMS320C6713
在传统的惯性测量中常选用陀螺仪测量转速及姿态角,但是其动态范围小、精度低、抗冲击能力差,很难达到惯性导航的目的。而MEMS加速度计相比与陀螺仪具有量程大、能耗小、动态范围大、寿命长、成本低,而且体积小、安装方便,其应用前景非常好,是今后捷联惯性导航系统的主要发展方向。
目前,在无陀螺惯性导航领域,国内学者在最近几年也做了不少研究工作,并提出了各种加速度计安装方案,主要以六加速度计及九加速度计安装方案为主。以六加速度计解算姿态角,只能解算出载体的转速平方项,开方后无法确定其方向。本系统设计了一种由九加速度计与磁强计作为惯性测量单元进行转速及姿态角的解算,该方案解算精度高,不必把加速度计放在质心处,虽然有漂移误差,但是由于载体的飞行时间较短,误差符合预设精度要求。
采用FPGA作为协处理器完成微惯性测量单元中多路传感器信号的同步采集及缓存,可以使DSP专注于解算而免于被频繁的数据采集中断而打扰,从而提高了姿态角测量的精度和实时性。
1加速度计配置方案及仿真分析
九加速度计及磁强计的安装方式如图1所示,编号1-9为加速度计,编号10-12为磁强计,箭头方向为加速度计或磁强计的敏感方向。
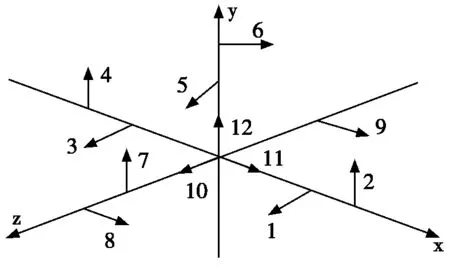
图1 九加速度计及磁强计的安装示意图
对于飞行体的转速,在这里不进行详细解算,参考文献[1]可知,飞行体的角加速度为:
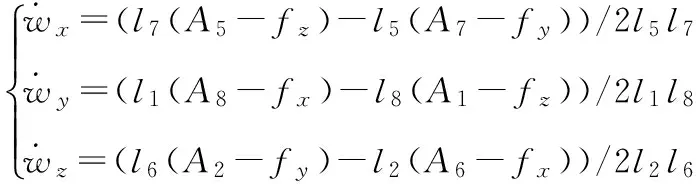
(1)
利用积分法对上式积分解得铁饼的转速,对于飞行体的姿态角,这里采用四元数法,参考文献[2]可知,飞行体的姿态角为:

(2)
对所设计的惯性测量单元中加速度计的构型方案进行仿真分析,论述该方案的可行性,本次运用MATLAB中的Simulink模块实现对捷联惯性导航系统仿真。由于条件有限,我们不能得到实际数据,因此我们先采用数学方法模拟出铁饼飞行过程中的轨迹,然后计算出陀螺仪和加速度计的输出,把其作为SINS解算器的输入,进行SINS解算,把解算的数据与模拟的轨迹数据(角速度、姿态、位置)进行对比,得到误差曲线,进行误差分析。
轨迹生成器的数据[3]如式(3),(4)所示:

(3)
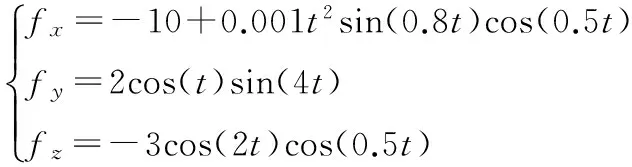
(4)
由于铁饼投掷过程长其飞行时间大约为16 s内,因此将本次仿真的时间设置为16 s,采样时间间隔为0.01 s,本次仿真中,忽略加速度计的常值漂移及随机误差,进行仿真,转速及俯仰角的仿真误差如图2,图3所示。

图2 转速仿真误差

图3 姿态角仿真误差
本次设计的转速传感器量程[3]为30 r/s(转每秒),而从图2可以看出在16 s内其转速误差低于30°/s(度每秒),符合预设要求;从图3可以看出由四元数法解得的俯仰角误差在0.5°内,误差特别小,因此此处可以选用这种方法解算。
2系统硬件设计
该解算系统包括电源模块、微惯性测量单元电路、信号调理电路、信号采集电路、FPGA及外围电路、DSP及外围电路。微惯性测量单元输出的模拟信号经信号调理电路滤波及放大,进入AD转换,在FPGA中设计了两个模块,其中ADC控制模块负责对A/D转换模块控制,FIFO存储模块负责对转换后的数据缓存,DSP负责把FIFO缓存的数据进行解算,从而把DSP从繁琐的数据采集及缓存中断中解脱出来。
2.1微惯性测量单元电路设计
2.1.1ADXL193电路设计
考虑到铁饼飞行过程中产生的加速度较大,因此,加速度计的量程必须满足要求,本文采用的是美国ADI公司生产的ADXL193硅微变电容式加速度计。ADXL193是单轴加速度计,其测量范围可以达到±250 g,其灵敏度为8 g/mV,输出信号带宽为0.4 kHz,能抵抗达4 000 g的冲击强度,元器件尺寸大小为5 mm×5 mm×5 mm,采用LCC封装。加速度计ADXL193的电路图如图4所示。
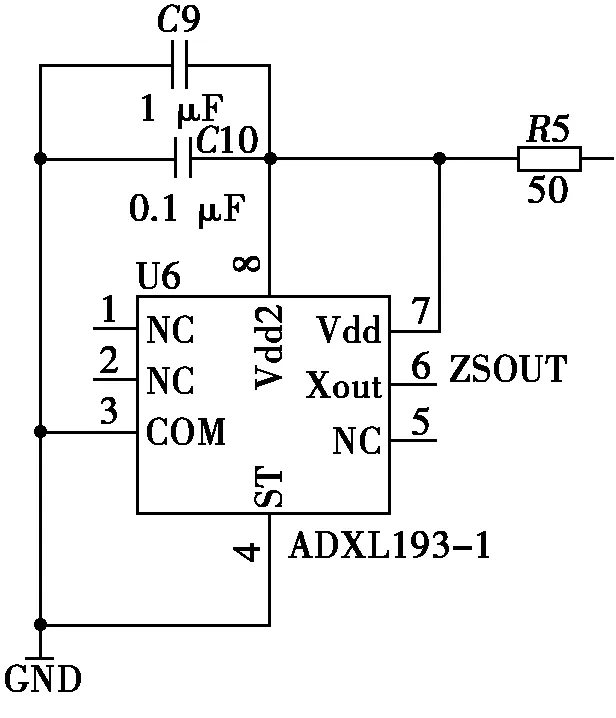
图4 加速度计ADXL193的电路图
2.1.2HMC1043复位电路设计
由于地磁场磁场强度很弱,因此我们要选用分辨率高的传感器;考虑到铁饼的内部空间有限,因此选择的磁传感器的体积要尽量小。这里选用HMC1043磁传感器,其分辨率高达120 uguass,量程为±6 guass,封装尺寸仅为3 mm×3 mm×3 mm,符合要求。由于该传感器长期暴漏在外部磁场中,内部单元的磁敏感方向杂乱无章,因而会造成灵敏度的下降,因此必须为磁传感器进行置位/复位。磁传感器HMC1043的置位/复位电路图如图5所示。
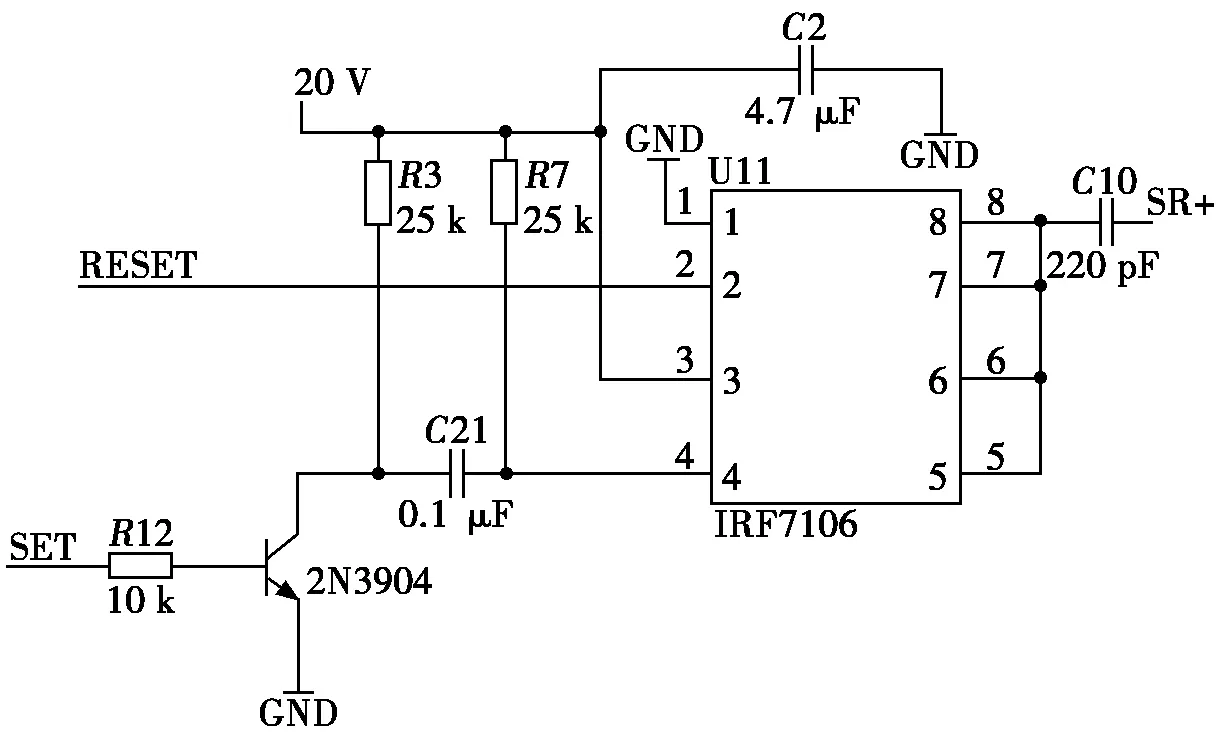
图5 磁传感器HMC1043的复位/置位电路图
2.2AD7656模数转换器
模数转换芯片采用美国模拟器件(ADI)公司推出的AD7656芯片[6],该芯片分辨率为16位,吞吐率高达250 Ksps,可处理的最高输入频率高达12 MHz;转换时间仅为3.1 μs;可允许6个ADC独立的进行同步采样。
为了同时完成12路传感器输出信号的模数转换,这里选用2片AD7656芯片,同时CONVSTA、CONVSTB、CONVSTC引脚要全部接在一起,即可完成12通道的同步转换;AD7656转换时,为了提高效率,简化设计,AD7656将采用内部基准电压,因此可将H/SSEL引脚拉低,同时将REFEN/DIS拉高即可;由于各传感器的输出电压小于5 V,因此将AD7656的参考电压定为2.5 V,输入方式选为±2REF,因此将RANGE拉高即可。为了提高采集数据的效率,可将转换后的数据输出设置为并行传输方式;另外,将A/D转换芯片的16根输出引脚与FPGA的16个I/O引脚相连接;本次设计选用XILINX公司的Spartan3A系列FPGA,该芯片最大可用I/O口311个,可满足设计要求。
2.3DSP与FPGA的接口电路设计
FPGA与DSP采用DSP的EMIF接口进行彼此通信[5],即将FPGA芯片作为DSP的异步外设,只需设置EMIF控制的寄存器为SRAM类型即可。由于在FPGA中设计两个模块,因此需要选择两个片选信号,即CE2和CE3,其地址范围为0XA00000000-0XB00000000。FPGA与DSP的接口示意图如图6所示。在图6中,ED[31:0]为数据总线,EA[21:2]为地址总线;CE为选通线,AOE为读控制线,AWE为写控制线,它们的时序可以通过设置相关的控制寄存器来实现。另外,为了保证DSP与FPGA在信号传输中的完整性,因此在它们之间串联了33 Ω的电阻来减小信号失真。

图6 FPGA与DSP的接口示意图
3系统软件设计
软件设计主要是通过程序实现铁饼导航参数的解算[4],其工作流程图如图7所示,由图可知,首先系统进行复位,然后进行系统初始化,包括PLL时钟模块、外部存储器接口(EMIF)、中断寄存器、A/D等初始化设置;在执行完初始化后,启动定时器,等待FPGA中断,当中断结束后,DSP读取FIFO中的数据,进行导航参数的解算,并将解算的结果存在指定的存储位置。
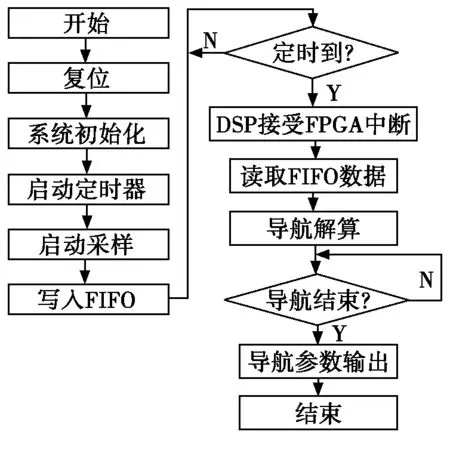
图7 系统程序流程图
4结束语
本文设计的转速传感器的量程为30 r/s,通过转速的解算及仿真可以看出解算误差在量程范围内,符合预设要求;同时,加速度计与磁传感器的选用解决了陀螺仪量程不足、抗冲击性不强的劣势;陀螺在设计系统时,采用FPGA作为协处理器,实现了数据的高速实时采集及缓存,提高了DSP的解算工作效率。
参考文献
[1]李海涛.加速度计/磁强计捷联惯导系统姿态解算方法研究[D].太原:中北大学,2007.5.
[2]史震,于秀萍,马澍田.无陀螺捷联式惯性导航系统[M].哈尔滨:哈尔滨工程大学出版社,2005.
[3]罗林燕.基于DSP的无陀螺角速度传感器的研究[D].北京: 北方工业大学,2013.7.
[4]杨敏.小型捷联惯性导航系统研究[D].长沙:中南大学,2010.3.
[5]刘国志.基于DSP-FPGA的捷联惯性导航系统设计[D].大连:大连理工大中学,2009.11.
[6]美国ADI公司.AD7656数据手册[Z].Norwood:ADI,2006.
The Solution System Design of High Speed Rotating Body Attitude Angle and Rotational Speed Based on DSP/FPGA
Shen Huaiying, Wu Bonong, Wang Shuaihui
(NorthChinaUniversityofTechnology,Beijing100144,China)
Abstract:The traditional gyroscope is difficult to achieve the goal of inertial navigation due to its small dynamic range, low precision and poor impact resistance. A mini attitude angle resolving system is designed to detect attitude angle. It takes accelerometer ADXL193 and geomagnetic sensor HMC1043 as MIMU and adopts FPGA as core coprocessor to control the ADC chip to make the 12-way sensor signals converted synchronously, then sampling data cached. Finally, the real-time resolving for attitude angle is achieved by DSP chip which as the core processor.
Key words:inertial navigation; speed and attitude angle resolving; ADXL193; TMS320C6713
收稿日期:2016-03-29
作者简介:沈怀营(1988- ),男,山东滕州市人,硕士研究生,研究方向:惯性导航。
文章编号:1674- 4578(2016)03- 0041- 03
中图分类号:TP 212.13
文献标识码:A