水下激光成像系统在反蛙人侦察中的应用*
2016-07-12吴泽伟李朝武
吴泽伟,李朝武,胡 博
(海军陆战学院,广州 510430)
水下激光成像系统在反蛙人侦察中的应用*
吴泽伟,李朝武,胡博
(海军陆战学院,广州510430)
摘要:水下激光成像系统作为一种主要的水下光电侦察装备,具有抗干扰能力强、探测距离远、成像质量高等诸多优点,可用于探测水下多种类型的目标。针对水下激光成像系统的反蛙人侦察应用问题展开研究,介绍了水下激光成像系统反蛙人侦察的技术、特点和现状,重点研究了水下激光成像系统几种典型的反蛙人侦察使用方法,并对今后水下激光成像系统反蛙人侦察的发展趋势进行了分析。
关键词:水下激光成像系统,反蛙人,侦察
0 引言
长期以来,蛙人在水下特种作战行动中的出色表现和不凡战绩使其一直被视为水下战场的主要威胁之一。特别是随着相关技术的不断发展,配备了高新装备的现代蛙人更是能够胜任各种复杂环境下的水下特种作战任务,如:潜入敌方海军港口和军事基地进行破坏活动、对停靠在港内的军舰实施破坏、在浅水海域进行布雷和反水雷作业[1],等等。
为应对蛙人日益严重的威胁,近年来各国都加大了对反蛙人作战的研究[2-3]。反蛙人侦察是反蛙人作战主要行动样式之一,主要采取水下侦察的方式,对敌蛙人目标进行探测和识别。目前水下反蛙人侦察的主要方法有:光电侦察、水声侦察、磁力探测,等等。水下激光成像系统作为一种主要反蛙人光电侦察装备,与传统的水下电视和水下照相等光电侦察设备相比,具有探测距离远、成像质量高等诸多优点,是一种具有更好应用前景的水下反蛙人侦察装备。
目前,水下激光成像侦察技术已经得到了广泛研究,并且已有不少水下激光成像侦察系统被实际应用到多种民用和军用领域,例如:海洋勘察、水下搜救、反水雷及其他军事目标等[4-6]。本文主要根据反蛙人侦察的军事需求,针对性研究了水下激光成像系统在反蛙人侦察中的应用问题。介绍了几类水下激光成像反蛙人侦察技术,概述了国内外水下激光成像侦察的现状,研究了几种典型的水下激光成像系统反蛙人侦察使用方法,最后,简要分析了水下激光成像系统反蛙人侦察的整体发展趋势。通过研究,为水下激光成像系统在反蛙人侦察作战中的实际使用提供参考。
1 水下激光成像反蛙人侦察技术
1.1主要技术
根据激光成像原理[7],水下激光成像反蛙人侦察技术主要包括:水下激光扫描成像反蛙人侦察技术、水下激光距离选通成像反蛙人侦察技术,以及偏振光水下成像反蛙人侦察技术。
①水下激光扫描成像反蛙人侦察。在水下激光扫描成像系统中,光学传感器与激光器被分开放置。激光器可以是连续激光器,经过光学系统被处理成为线光源,同时接收器前架设狭缝系统,此时被激光照射的视场和光学传感器采集的视场只有很小的重叠部分,从而减小探测器所接收到的散射光。利用同步扫描技术,逐个像素点探测来重建蛙人目标图像。这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收蛙人目标信息,大大减小了后向散射光对蛙人目标成像的影响,提高了系统信噪比和作用距离。激光扫描水下成像系统的探测距离比较远,能扫描较宽区域,有效视场较大。
②水下激光距离选通成像反蛙人侦察。距离选通技术是利用脉冲激光器和选通摄像机,以脉冲发射和开启成像时间的先后来分开不同距离上的散射光和目标场景反射光,使由被蛙人目标反射回来的辐射脉冲刚好在摄像机选通开启时间内到达摄像机并成像(如图1所示)。如果选通脉冲宽度和激光脉冲宽度都很窄,使得只有蛙人目标附近的反射光才能到达摄像机并成像,传输路径上的大部分后向散射光被隔离,从而可大大减小后向散射光的影响,提高系统的探测和识别距离。
③水下偏振光成像反蛙人侦察。偏振光成像反蛙人侦察是利用蛙人的反射光和后向散射光的偏振特性的不同来改善成像的分辨率。激光波长与海水及海水中悬浮颗粒和有机物分子的尺寸相当,其相对折射率为1 100~1 115,一般遵从瑞利或米氏散射理论。根据散射理论,悬浮粒子后向散射的退偏振度小于物体后向散射光的退偏振度。如果在水下用偏振光源照明,则大部分后向散射光也将是偏振的,如果采用适当取向的检偏器对后向散射光加以抑制,可减弱散射光的影响,提高成像质量。

图1 水下激光距离选通成像反蛙人侦察原理
1.2主要特点
与声纳等水下侦察装备相比,水下激光成像反蛙人侦察装备具有体积小、重量轻、信息量大、探测精度高、隐蔽性能好、抗干扰能力强等诸多优点。而与水下电视和水下照相机等传统的水下光电侦察装备相比,水下激光成像系统可选用被视为“光学窗口”的蓝绿激光(波长一般为430 nm~570 nm),以显著降低光的能量衰减,有效提高传输性能。表1给出了几种典型海水介质的光波传输窗口。
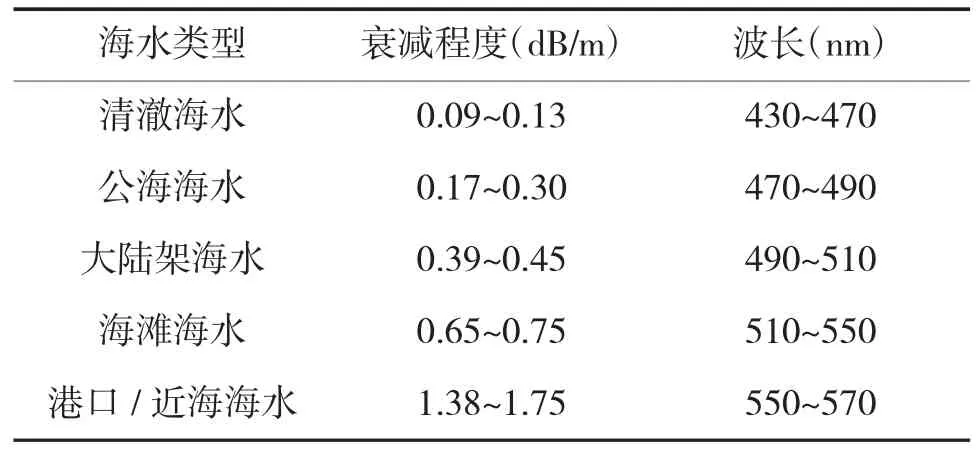
表1 典型海水的光波传输窗口
1.3水下激光成像反蛙人侦察的关键技术
①目标图像处理技术。随着水下光电成像装备的发展,水下目标图像处理技术成为研究的热点问题之一。目前的水下激光成像目标图像处理所关注的技术有非均匀照明、水下图像噪声去除、水下图像颜色校正等。
②激光发生器技术。水下激光成像系统的激光器应满足以下条件:激光工作波长与传输窗口相匹配;转换效率尽可能高;机械性能和热性能好;结构牢固、尺寸较小、有效负载小,等等。能产生蓝绿光的激光发生器种类很多,如倍频Nd:YAG激光器,氯化氙激光器,氩离子激光器等。目前,距离选通水下激光系统多采用倍频Nd:YAG激光器,同步扫描水下激光系统普遍使用氩离子激光器。
③接收机技术。水下激光成像系统的接收机要求具有高的空间分辨率和量子效率,噪声低,孔径大,有足够的增益动态范围。近年来研制的GaAsP光电阴极管在532 nm波长上,量子效率接近50%。可选通的CCD耦合光电二级管信噪比达到10 dB以上,而具有大动态范围的CCD器件已研制成功。
2 水下激光成像侦察系统现状
2.1国外水下激光成像侦察系统现状
美国是开展激光水下探测技术研究的代表性国家。美国Syracuse大学早在1968年就建造了世界上第一套激光海水探测系统,首次阐述了该系统用于水深测量的可行性。1997年在美国海军的支持下,SEO公司研制的水下激光距离选通成像系统ULIS采用二级管泵浦Nd:YLF激光器和三代像增强器,激光器采用创新的稳频技术减小激光器线宽,接收器前配有小于1 nm的窄带滤光片,有效降低到达接收器的背景噪声。该系统平均输出功率1 W,对于蛙人、水雷等目标,最大探测距离可达100 m。此外,美国西屋公司研制的同步扫描激光水下成像系统有效视场可达70°,扫描时间为0.1 ms,水下观测和成像距离为4倍衰减长度[8]。
加拿大典型的水下激光成像系统是国防研究所研制的LUCIE系列产品,可装载在水下遥控机器人上,能够在200 m水深作业,对港口和深海进行侦察。该产品至今已发展了三代。以第二代LUCIE2为例,其激光器532 nm,重频22.5 kHz,功率2 W,脉宽7 ns,可控制激光器照明视场与成像视场匹配;像增强器选通门宽3 ns,动态偏振控制,可远程操控。系统为圆柱体外形,直径28 cm,长度70 cm,功耗250 W,重45 kg。经测试,LUCIE2可有效用于探测蛙人、水雷等水下目标[5]。
瑞典国防研究院也进行了多次水下激光探测试验。研制的系统采用二极管泵浦Nd:YAG激光器,532 nm蓝绿光,平均功率1 W,脉宽5 ns;像增强器选通门宽小于6 ns,亮度增益最高25 000;系统由两个圆柱体组成,尺寸均为15 cm×50 cm(直径×长度);工作范围:3 m~100 m;图像分辨率768×576;功耗80 W。
2.2我国水下激光成像侦察系统现状
近几年来,西安光机所、长春光机所、上海光机所和天津电视技术研究所、北京理工大学、华中理工大学、东南大学等单位均对水下激光成像系统进行了研究,但总体上与国际先进水平相比还有一定的差距。
北京理工大学与北方夜视公司合作,研制成功了适合水下激光成像系统用的高性能选通型超二代微光ICCD器件,突破了距离选通成像小型程控电源及其控制技术,并成功进行了水下成像实验。2006年在专项课题支持下,又研制成功了水下脉冲激光距离选通成像试验系统。
水下激光扫描成像技术方面,国内已有一些初步研究,如华中科技大学实现了激光单点水下扫描成像实验,达到60 m左右的探测水深。2009年相关单位开始对基于条纹管的水下LLS成像理论进行研究,成功搭建了线激光加条纹管的LLS成像系统。
3 水下激光成像系统反蛙人侦察使用
根据不同的水下激光成像系统类型,可以分为艇载水下激光成像系统反蛙人侦察、单兵便携式水下激光成像系统反蛙人侦察、自主式水下激光成像系统反蛙人侦察。
3.1艇载水下激光成像系统反蛙人侦察
主要是将水下激光成像系统安装在潜艇或水面舰艇底部,在潜艇或水面舰艇驻泊或航行过程中对企图潜入实施攻击和破坏的蛙人目标进行探测和识别。现代水下特种作战行动中,由蛙人潜水或借助各种小型蛙人运载器抵近舰艇目标实施攻击或炸断螺旋桨等破坏性行动,已经成为一种主要的水下特种作战行动样式,特别是针对航母、大型水面舰艇等目标,往往会获取很好的威慑和毁伤效果。
艇载水下激光成像的代表性系统有美国的SM2000,由美国西屋公司水下激光系统部研制。该系统的激光器扫描器和接收器装在舰艇底部同一耐压圆筒内,显控台则在舰艇内部上便于观看和分析。目前,SM2000已装在美国海军现役潜艇底部,通过多次试验表明,能够看清水下50 m以内、直径为0.15 m的目标,可用于水下反蛙人、反水雷以及水下勘察和打捞等多种任务。
由于潜艇和水面舰艇一般装载有多种可用于水下侦察的任务载荷,如各种探测声纳。因此,艇载水下激光成像系统主要用于配合其他水下探测设备一同使用,特别是对已经通过水声干扰、欺骗等手段有效突破声纳探测防线的蛙人目标,艇载水下激光成像系统将发挥其抗干扰能力强,成像质量高等优势,及时发现敌蛙人目标,为我采取反蛙人对抗措施提供末端情报支持,避免舰艇受到破坏。
利用艇载水下激光成像系统实施反蛙人侦察需要注意以下两方面问题:一是当潜艇或水面舰艇处于航行状态时,为提高目标成像的质量,需要降低到适当的航速后再启用艇载水下激光成像系统实施反蛙人侦察,例如,前面提到的美国的SM2000系统,通过实验表明当潜艇航速为0.5 kn~6 kn时,其成像效果为佳。二是为了提高侦察的覆盖范围,需要采用大角度扫描的艇载水下激光成像系统,当扫描角度达不到反蛙人侦察需要时,也可在舰艇底部合理分装多部水下激光成像系统。
3.2单兵便携式水下激光成像系统反蛙人侦察
单兵便携式水下激光成像系统主要用于蛙人反制蛙人行动,具体指:在我浅水及港口基地,或者敌蛙人可能出现的近岸海域,派出己方蛙人携带便携式的水下激光成像系统进行侦察,及时发现敌蛙人目标并展开相应的对抗行动。
具有代表性的单兵便携式水下激光成像系统有加拿大的第三代手持式LUCIE、系统宽20 cm、高10 cm、长25 cm、重5 kg,便于手持式操作,电池持续供电时间45 min,可用于对各类水下目标的探测。
通过多次的实验和实践证明,对于未知蛙人或其他入侵小目标,由己方蛙人来实施反制行动是一种简单却非常有效的形式。但与传统的蛙人反制蛙人不一样的是,当今的蛙人水下行动不再是赤手空拳的行动,在技术装备上占优势的一方将获得水下对抗的绝对主动权。因此,为蛙人提供便携式的水下激光成像系统,以先敌发现目标和先敌攻击目标,将显得尤为重要。
由于单兵便携式水下激光成像系统通常具有体积小、重量轻的特点,完全满足蛙人水下灵活机动的需要。蛙人在侦察行动中,只需要将系统朝向目标方位,即可通过显示屏幕观察是否有敌蛙人及其他小目标出现。由于系统的功率相对手持声纳等装备要小得多,因此,系统的持续工作时间较长,一般可达到蛙人轻潜水装具持续工作的时间。
使用单兵便携式水下激光成像系统实施反蛙人侦察具有如下特点:一是部署非常灵活,只要蛙人可以进入的海域,皆可携带系统进行侦察;二是便于蛙人水下连贯行动,通过便携式水下激光成像系统发现并确认敌蛙人目标后,即可由蛙人自行使用水下枪械等武器进行攻击,集探测、识别、攻击等多个战术环节于一体,在行动过程中一般不需要外界的目标信息指示,可减少反蛙人行动中水面和水下的通信。
3.3自主式水下激光成像系统反蛙人侦察
自主式水下激光成像系统反蛙人侦察是指:将水下激光成像系统作为一种有效任务载荷装载在UUV等水下无人平台上,并为无人平台设定好航行路线或由平台自主地运动,以完成对蛙人等水下小目标的探测、处理和识别等任务。
目前水下激光成像、水下电视、水下照相机等水下光电探测设备已经成为水下航行器的主要任务载荷之一。例如,近年来美国等一些主要国家研制的REMUS100、近期水雷侦察系统(NMRS)等水下无人平台,都装载了水下激光成像等多种类型的水下光电探测设备,并已投入到水下目标探测等实际应用当中[9]。
自主式水下激光成像系统实施反蛙人侦察可采用两种形式:预先部署侦察和临时部署侦察。预先部署侦察通常用于我重要港口基地反蛙人侦察行动,是指常态化地在港口海域部署一定数量自主式水下激光成像系统,以低速游弋和待机相结合的形式展开侦查,系统之间相互连成网络,对获取信息进行传输和融合处理,并将结果实时或按一定时间间隔传回岸上指挥所。临时部署侦察则通常是我潜艇或水面舰艇在海上驻泊期间,为防止敌蛙人趁机入侵实施破坏,而针对性地在周围海域或主要威胁方向投放一定数量的自主式水下激光成像系统实施反蛙人侦察。
由于水下无人平台的体积和能源限制,对水下激光成像系统的功率有一定限制,使得一些激光器光电转换效率不高、水冷系统效率低的水下激光成像系统达不到要求。目前,国外一些国家已在重点研制小体积、高功率、光束质量好、热损耗低的全固态激光器或光纤激光器,可有效解决上述问题,使得水下激光成像自主侦察的应用前景更为广阔。
利用自主式水下激光成像系统实施反蛙人侦察具有以下特点:一是无人平台的体积小,目标特征不明显,而且还可在水下长时间保持低噪声航行,不容易被敌所发现,因此,具备较强的水下隐蔽侦察能力;二是可近距离探测目标,提高探测精度和识别效果;三是可采用多台自主式水下激光成像系统组网的形式进行协同反蛙人侦察,通过按一定形式合理配置、信息共享和协同处理等手段,扩大对蛙人目标侦察海域的覆盖范围,提高获取蛙人信息的全面性和准确性;四是在使用自主式水下激光成像系统实施反蛙人侦察时,系统可远离母艇和其他有人平台,以减少这些平台暴露的机会以提高其安全性。
4 水下激光成像系统反蛙人侦察发展
随着水下特种作战和蛙人与反蛙人对抗的发展和深入,各种支持和保障水下作战行动的装备和器材也将不断提高。根据任务需要以及结合当前国内外的研究动态,水下激光成像系统的发展总体上体现出以下几个趋势。
4.1目标成像3D化
为了完善蛙人目标的三维信息,今后水下激光3D成像将成为主要的方式。研究表明,利用条纹管水下激光三维成像技术可提供很好的3D目标图像。条纹管水下激光三维成像技术使用脉冲激光,接收装置是时间分辨条纹管。发射器发射一个偏离轴线的扇形光束,然后成像在条纹管的狭缝光电阴极上。用平行板电极对从光电阴极逸出的光电子进行加速、聚焦和偏转,同时垂直于扇形光束方向有一个扫描电压能够实时控制光束偏转,这样就能得到每个激光脉冲的距离和方位图像。
4.2目标图像不断趋于高清
根据原理,水下激光成像系统虽然可以利用激光所独有的时间特性和空间特性,采用距离选通或同步扫描成像的方式来减小后向散射光噪声的影响,但由此所获得的激光图像的质量仍然不够好,如:目标边界模糊,细节分辨能力差。目前,国内外都在加大水下激光成像的图像处理技术研究。如直方图均衡化就是一种常用的图像增强方法,通过修改图像的直方图来达到提高对比度的目的。此外一些研究表明,利用调制/解调技术可以有效分离分散的散射光噪声和目标反射光信号,从而提高目标成像的清晰度。
4.3装备不断趋于小型化
一是为满足单兵利用水下激光成像系统实施反蛙人侦察的需要。现代水下特种作战行动,单兵往往需携带多种类型的武器和技术装备,包括轻潜水装具、水下手枪及步枪、水下导航、水下通信以及其他探测设备,因此,最大化减小水下激光成像侦察系统的体积和重量、提高系统便携性和灵活性将成为主要发展方向。二是为满足自主式水下激光成像系统反蛙人侦察需要,UUV等水下自主式平台受能源和体积限制,往往无法装载太多的任务载荷,并且所装载任务载荷体积和功率也不能太大,因此,也必须使用小型化、小功率的水下激光成像系统来适应需求。
4.4分布式网络化侦察
信息化条件下的军事侦察行动已不是单兵/节点式的信息获取与处理作业,而是讲究侦察行动的协同、信息的融合、感知的共享。随着水下通信技术的发展,由多个水下激光成像系统组网实施协同侦察将是今后水下反蛙人侦察的主要样式之一。为提高侦察网络本身的稳定性和鲁棒性,各水下激光成像系统通常采用分布式组网的方式,每个系统节点都与其近邻节点进行信息互通,并采用一定的协同机制和算法对蛙人目标信息进行融合处理和共享,并将结果实时反馈到指挥所。随着相关技术的发展,在将来的一体化水下侦察预警作战中,水下激光成像侦察网络将成为水下传感器网络的重要组成部分。
5 结论
目前,国外在水下激光成像技术方面已经获得了大量的成果,国内的相关研究机构在一些关键技术和核心部件上也取得了不少突破。针对水下激光成像系统在反蛙人侦察中的应用问题,目前急需解决的问题主要为:一是进一步明确水下激光成像系统反蛙人侦察的任务图像,探讨各种条件下利用水下激光成像系统实施反蛙人侦察的战术运用方法,并从作战使用的角度对系统本身提出进一步的需求;二是通过不断仿真、实验等手段,深入分析和计算水下激光成像系统在实际水下反蛙人侦察使用中可能会出现的各种技术问题和难题,通过不断改进性能参数以满足反蛙人侦察需要。本文通过对水下激光成像系统反蛙人侦察技术、现状、使用以及发展等方面的研究,可为解决上述问题提供一定的理论参考。
参考文献:
[1]滕俊,郭万海,刘冬利.国外海军水下特种作战研究[J].舰船电子对抗,2012,35(4):39-42.
[2]郭万海,张淑芳,孔令富.水面舰艇编队反蛙人防御观察组织[J].火力与指挥控制,2008,33(1):63-65.
[3]张彦敏,佟盛.反蛙人技术在港口监控中的战术应用[J].舰船科学技术,2008,30(6):168-171.
[4]KOCAK D M,DALGLEISH F R,CAIMI F M,et al. A focus on recent developments and trends in underwater imaging [J]. Marine Technology Society Journal,2008,42(1):52-67.
[5]曹峰梅,金伟其,黄有为,等.水下光电成像技术与装备研究进展(上)-水下激光距离选通技术[J].红外技术,2011,33(2):63-69.
[6]金伟其,王霞,曹峰梅,等.水下光电成像技术与装备研究进展(下)[J].红外技术,2011,33(3):125-132.
[7]徐启阳,杨坤涛.蓝绿激光雷达海洋探测[M].北京:国防工业出版社,2002.
[8]李源慧,钟晓春,杨超,等.水下激光目标探测及其发展[J].光通信技术,2008,32(6):61-64.
[9]陈强.水下无人航行器[J].北京:国防工业出版社,2014.
Application of Underwater Laser Imaging System in Anti- diver Reconnaissance
WU Ze-wei,LI Chao-wu,HU Bo
(Navy Marine Academy,Guangzhou 510430,China)
Abstract:The underwater laser imaging system is main underwater photoelectric reconnaissance equipment. It has advantages in anti-interference,remote detection and imaging quality,and can be used in the detection of various underwater targets. The current paper investigates the application of the underwater laser imaging system in anti-diver reconnaissance. The technologies,characteristics and current situation are presented,and the application of several typical underwater laser imaging systems in anti-diver reconnaissance are studied. The development tendency of anti-diver reconnaissance via underwater laser imaging system is analyzed,finally.
Key words:underwater laser imaging system,anti-diver,reconnaissance
中图分类号:TN248
文献标识码:A
文章编号:1002-0640(2016)05-0149-05
收稿日期:2015-05-15修回日期:2015-05-27
*基金项目:国家自然科学基金资助项目(61074012,11202239)
作者简介:吴泽伟(1982-),男,安徽黄山人,博士,讲师。研究方向:水下航行器协同控制及军事应用、水下武器系统。