基于机载实时模型的发动机执行机构故障状态参数估计
2016-07-11何佳倩李建榕张志舒中航工业沈阳发动机设计研究所沈阳110015
何佳倩,李建榕,张志舒(中航工业沈阳发动机设计研究所,沈阳110015)
基于机载实时模型的发动机执行机构故障状态参数估计
何佳倩,李建榕,张志舒
(中航工业沈阳发动机设计研究所,沈阳110015)
摘要:为了对发动机的主燃烧室供油量控制器、喷管喉部面积控制器、风扇进口可调导叶角度控制器、压气机进口可调导叶角度控制器进行故障诊断,建立了基于简化n+1残量方法的非线性机载实时模型,并结合常增益扩展卡尔曼滤波器建立执行机构控制参数估计器,利用非线性部件级模型模拟飞行包线内发动机执行机构的软故障。仿真结果表明:执行机构控制参数估计器在飞行包线内能实现较高精度估计,且具有较好的稳定性。
关键词:故障诊断;执行机构;控制参数估计器;机载实时模型;飞行包线;控制系统;航空发动机
引用格式:何佳清,李建榕,张志舒.基于机载实时模型的发动机执行机构故障诊断参数估计[J].航空发动机,2016,42(3):33-37.HE Jiaqian,LI Jianrong, ZHANG Zhishu.Actuator fault state parameter estimation of aeroengine based on on-board real time mode[J].Aeroengine,2016,42(3):33-37.
0 引言
执行机构是发动机控制系统必不可少的组成元件,发动机的工作环境易造成执行机构故障,发动机必须具有能检测执行机构故障的系统,以提高控制系统的可靠性。早在20世纪70年代,W allhagen首先提出用传感器的解析余度技术来提高发动机控制系统的可靠性[1];同时期,麻省理工学院提出了故障诊断技术[2];随后,W illsky、Himmelblau相继发表关于动态系统故障检测与诊断的相关研究成果[2-3];现有的数字电子控制系统[4-5]故障诊断方法通常采用基于模型的参数估计法[6],主要应用于传感器输出型故障;执行机构故障并不是输出型故障,基于模型的方法下执行机构故障诊断比传感器故障诊断更具有挑战性[7];执行机构故障诊断大多数针对主燃油流量和喷管喉部面积[8],而在实际发动机故障中,由于进口风扇和高压压气机导叶角执行机构故障导致的发动机性能损失并不罕见,若能估算出进口风扇和高压压气机导叶角的值将在一定程度上简化排查发动机故障工作;实时的发动机状态监控和状态估计是发动机性能寻优控制得以实现的关键,实现更加实时全面的发动机状态监控的有效途径是建立发动机机载实时模型[9-10]。
本文针对基于机载模型航空发动机控制系统执行机构问题,建立机载实时模型并评估模型的实时性,根据状态变量模型建立常增益扩展卡尔曼滤波器估计的最优估计公式,对燃油控制装置等进行软故障模拟并估计。
1 机载实时模型
1.1非线性模型建模
建立部件级发动机数学模型的思路是:已知发动机各部件特性,给定发动机调节规律,从进气道、风扇、高压压气机、主燃烧室、高压涡轮、低压涡轮、外涵道、混合室、加力燃烧室到尾喷管,逐一建立气体流动方程、热力过程方程和发动机共同工作方程并组成非线性方程组求解,确定发动机的共同工作点。该模型能够考虑所有条件对发动机特性的影响,当部件特性精度提高时,模型能以相应的精度模拟发动机的静态和动态性能,并计算截面性能参数和整机性能参数[11]。
1.2简化n+1残量方法
发动机模型的计算时间主要取决于每一步热力学计算所需的时间和热力循环的计算次数,利用简化n+1残量方法来减少热力循环的计算次数。在利用n+1残量方法求解时建立初始迭代矩阵需要计算n+1次热力循环,其中n为误差变量数。通常情况下,此部分的计算不能省略。为了进一步提高运算速度,提出了简化n+1残量方法。该方法在连续进行多次运算且前后2次计算输入量相差不大的情况下,可利用上一步运算所产生的迭代矩阵直接构建本步初始迭代矩阵,将构建初始迭代矩阵计算次数减小到1次,从而大幅度提高了运算速度。

在第2步中计算得到迭代的初始残差矩阵为

而在第k+1次计算时,在第1步中计算得到的初始残差向量为

在第2步中需要计算迭代初始残差矩阵为

在标准n+1残量法中需要计算n次热力循环求取,由于函数F(U,X)是连续可导的,因此可对其1阶泰勒展开得
其中
分别为函数F(U,X)对变量U和X的1阶偏导数,可以得出

即当ΔX,ΔU与X,U相比均很小时,可以得出

由此,在迭代过程中,当2次迭代过程的调节器输入及环境变量相差不大时,可以利用上一次迭代运算取得的、和本次迭代第1步中所获得的,不用进行热力计算,得到迭代初始矩阵,再利用迭代求解方程组。即原有n+1残量方法计算中第2步里的n次热力计算可以省略。
1.3实时性评估
对模型进行地面(H=0km,Ma=0)状态节流特性计算,并进行实时性评估,仿真曲线如图1所示。从图中可见,计算稳态过程平均需要3.56ms,能够满足实时性需求。

图1 模型实时性仿真
2 执行机构闭环回路系统
发动机主燃油流量控制闭环回路原理如图2所示。从图中可见,位置给定后通过适当的校正得到执行机构控制量数字信号,经转换变为电信号控制电液伺服阀,继而调节滑阀阀芯位移,拖动作动筒以改变计量阀开度。位移反馈传感器的输出信号与执行机构输出相对应,若二者有偏差,控制器将给出偏离控制信号,继续通过电液伺服阀调节滑阀阀芯位移,直到位移反馈传感器的输出信号与执行机构输出相差在允许裕度范围内[12-13]。

图2 执行机构闭环回路原理
本课题研究的执行机构故障诊断不分别考虑执行器(电液伺服阀和计量活门)故障和位移反馈传感器故障,将1个执行机构故障认为是实际输出物理量与其输入指令之间稳态时的不一致。
3 执行机构故障状态参数估计
3.1基于模型的故障诊断系统
研究执行机构故障状态参数估计,需要了解故障诊断系统。在建立涡扇发动机解析模型的基础上,利用发动机真实试车数据修正后的解析模型和参数估计器进行故障诊断。可测截面参数与机载模型估计出的可测截面参数估计值的偏差,通过参数估计器得到部件特性和控制参数。估计值与真实值的差值构造残差,通过故障检测判断是否存在故障并隔离出疑似故障部件。根据诊断结果利用寻优控制优化发动机性能,若有传感器或执行机构故障,需用机载模型输出参数重构故障传感器或执行机构。基于模型的故障诊断原理如图3所示[14]。
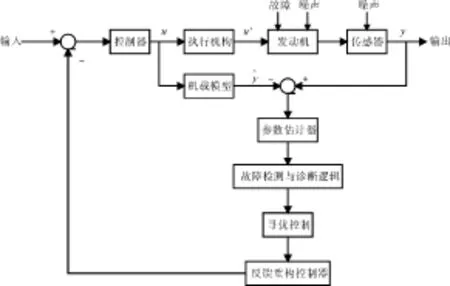
图3 基于模型的故障诊断原理
3.2参数估计器
根据故障诊断系统得到参数估计器的结构如图4所示。参数估计方法通常是求取可测的发动机输出量y和相应的模型输出之间的偏差,将偏差乘以增益矩阵K,用结果修正状态估计值、控制量或健康参数,使状态估计值逐步接近真实发动机状态x、控制量u和部件特性退化情况。选用的非线性性能参数估计器增益矩阵的设计方法为常增益扩展卡尔曼滤波方法。

图4 参数估计器结构
3.3常增益扩展卡尔曼滤波器
执行机构故障模拟为硬故障偏差。考虑系统噪声和测量噪声时,含有执行机构故障的航空发动机状态空间模型,对在某个飞行条件下的某1个平衡点进行线性化,则发动机的线形化模型可表示为
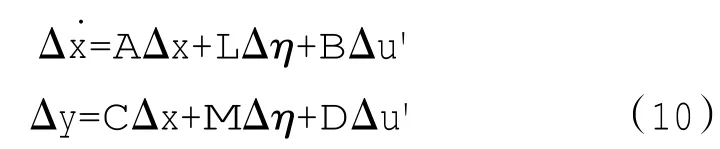
式中:A、B、C、D、L、M为发动机状态矩阵;x为状态变量向量;η为健康参数向量;u'=u+b为加入执行机构偏差后的控制输入向量,u为控制输入向量,b为执行机构偏差;y为发动机可测输出向量。
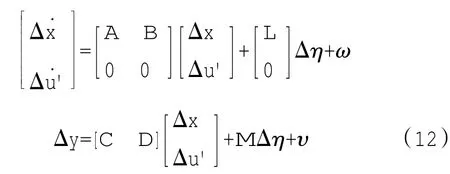
考虑到系统的动态噪声和量测噪声,状态空间模型可描述为

式中:ω,υ为互不相干的零均值白噪声信号,其协方差阵分别为Q和R。
由于u'是被估计向量,将u'与x合并作为增广的状态变量,即
经过卡尔曼滤波器的最优估计为
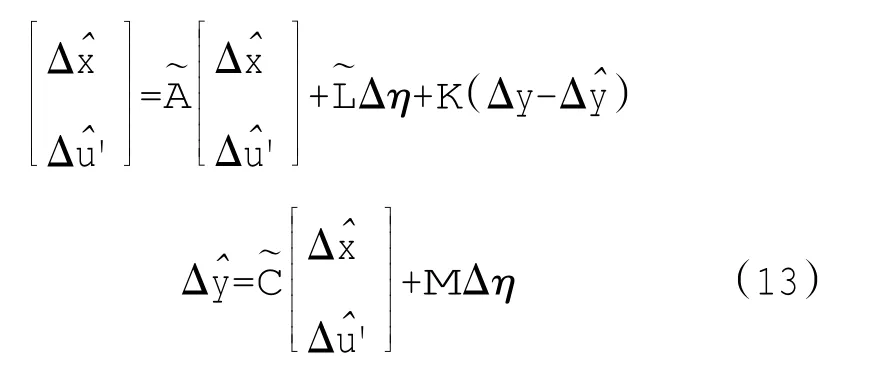



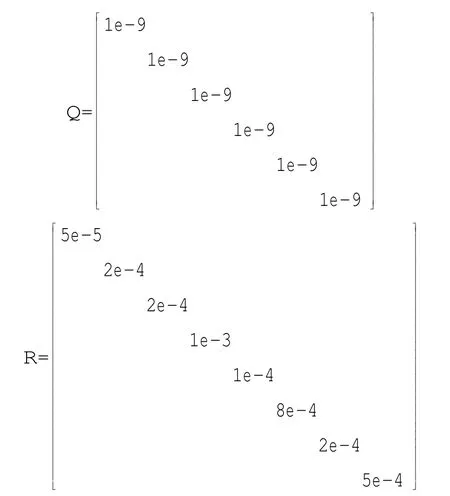
P为由协方差矩阵构成的Riccati方程的解,可求解下式计算得到、已知,给定Q和R即可求解Riccati方程,得到增益矩阵K。选用常增益扩展卡尔曼滤波器,即为在飞行包线内不同点使用同一卡尔曼滤波增益矩阵,此矩阵为地面最大状态下计算得到,由于常增益扩展卡尔曼滤波器不需要在线计算增益矩阵,计算量大幅减少。该方法中的控制参数修正过程所需的计算量较小,主要计算量为计算1次发动机非线性动态模型[15-16]。
4 仿真计算
选取部件级非线性模型代替真实发动机。选取设计点设计K阵,其中Q阵和R阵分别为
军用小涵道比涡扇发动机典型的工作包线如图5所示。为评估控制参数估计器在不同飞行条件下的估计的精确度和稳定性,选取飞行包线内A(0,0)、B (10,1.0)、C (12,1.6)、D(20,1.2)和E(20,1.6),分别进行执行机构控制参数估计。发动机在各工作点均处于最大状态。
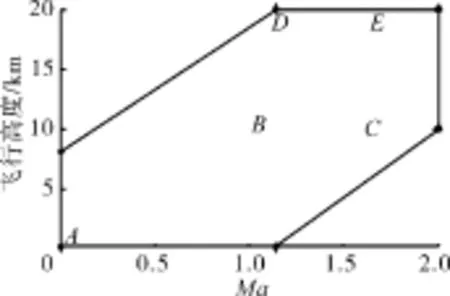
图5 军用小涵道比涡扇发动机典型的工作包线
为了模拟参数估计器在真实发动机上的工作,需要考虑实际系统的测量误差。假设各传感器的测量误差分别为:高、低压转速(±10 r/min),风扇、压气机和混合室的出口总温(±2 K)、风扇出口总压(±300 Pa)、压气机出口总压(±1000 Pa),混合室出口总压(±400 Pa)。对非线性模型输出量加入相应幅值的高斯白噪声信号来模拟量测噪声。部件级非线性模型代表执行机构发生故障的真实发动机,设主燃油W FB执行机构在第10 s发生硬故障偏大0.05 kg/s,喷口A8执行机构在第20 s发生硬故障增大0.03 m2,风扇进口可调导叶角αF在第10 s发生硬故障偏开1°,压气机进口可调导叶角αC在第20 s发生硬故障偏开2°。
仿真计算结果如图6~15所示。

图6 h=0 km、Ma= 0处Wfb和A8估计结果
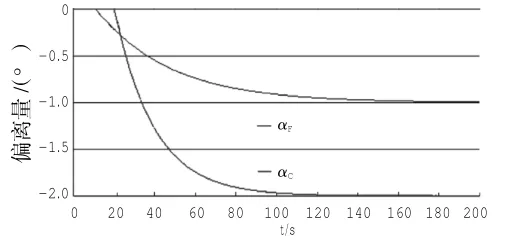
图7 h=0 km、Ma= 0处αF和αC估计结果

图8 h=10 km、Ma =1.0处Wfb和A8估计结果

图9 h=10 km、Ma =1.0处αF和αC估计结果

图10 h=12 km、Ma=1.6处Wfb和A8估计结果

图11 h=12 km、Ma=1.6处αF和αC估计结果
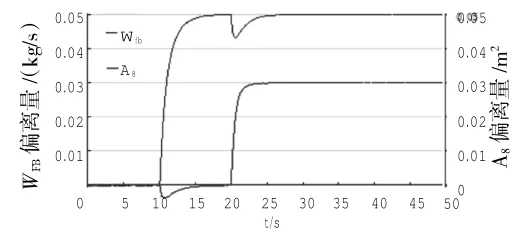
图12 h=20 km、Ma=1.2处Wfb和A8估计结果
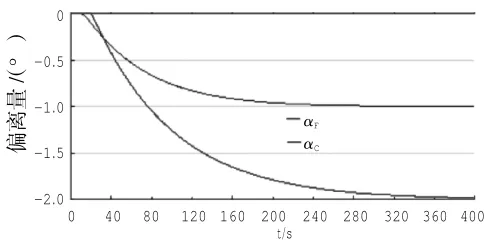
图13 h=0 km、Ma=1.2处αF和αC估计结果
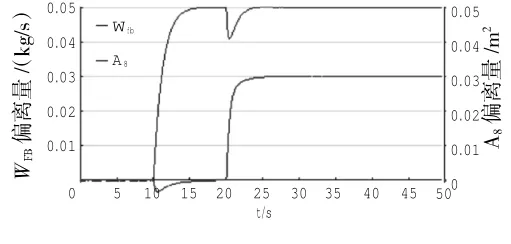
图14 h=20 km、Ma=1.6处Wfb和A8估计结果
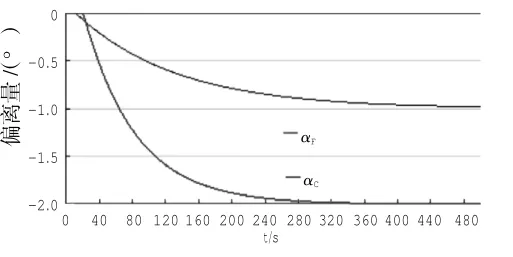
图15 h=20 km、Ma=0.6处αF和αC估计结果
从图6~15中可见,各执行机构控制参数的估计值均逐渐逼近各自给定的偏移量。其中,主燃油流量Wfb的估计误差为0.001 kg/s,喷口A8的估计误差为0.001 m2,风扇导叶角αF的估计误差为0.01°,压气机导叶角αC的估计误差为0.001°。在飞行包线内A (0,0)、B(10,1.0)、C(12,1.6)、D(20,1.2)和E(20,1.6)5个状态点处均能准确跟踪执行机构控制参数的变化。
从各图中还可见,Wfb和A8的偏移量估计值在10 s内均能达到精度要求,αF和αC均能达到精度要求。在多状态点多次反复计算中,各控制量的估计均收敛,初步验证了执行机构控制量估计器在飞行包线内具有较好的稳定性。
5 结论
通过本文研究,可以得到以下结论:
(1)基于机载模型的卡尔曼滤波方法的发动机执行机构控制参数估计器,对工作在飞行包线内不同工作点处的模拟发动机的执行机构软故障均能准确地进行估计;
(2)在飞行包线不同工作条件下,执行机构控制参数估计器均能够较为稳定的跟踪控制量的变化,初步验证了基于机载模型的卡尔曼滤波的执行机构故障诊断方法在全包线内具有较好的稳定性,在工程实践中有较好的应用前景。
参考文献:
[1]盛雯.发动机数控系统传感器解析余度研究[D].南京:南京航空航天大学,1996. SHENG W en.Research on sensor analytical redundancy of aeroengine numerical control system[D].Nanjing:Nanjing University of Aeronautics and Astronautics,1996(.in Chinese)
[2]W illsky A S.A survey of design methods for failure detection in dynamics ystems[J].Automatica,1976,12(6):601-611.
[3] Himmelblau D M. Fault detection and diagnosis in chemical and petrochemical processes [M].New York:Elsevier Scientific Publishing Company,1978:26-29.
[4]周永权.基于实时操作系统的航空发动机数字控制器软件设计[D].南京:南京航空航天大学,2009. ZHOU Yongquan.The software design of aeroengine digital controller based on real-time operating system[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2009(.in Chinese)
[5]任东.航空发动机状态监视和故障诊断方法研究[D].南京:南京航空航天大学,2009. REN Dong.A study on aeroengine condition monitoring and fault diag-nosis method [D].Nanjing:Nanjing University of Aeronautics and As-tronautics,2009.(in Chinese)
[6]姜云春.基于模型的控制系统鲁棒故障诊断技术研究[D].长沙:国防科学技术大学,2006. JIANG Yunchun. Research on robust model-based fault diagnosis technology for control systems[D].Changsha:National University of Defense Technology,2006.(in Chinese)
[7]薛薇.发动机控制系统传感器及执行机构故障诊断[D].西安:西北工业大学,2007. XUE Wei.Sensor and actuator fault diagnosis of aeroengine control system[D].Xi'an:Northwestern Polytechnical University,2007.(in Chinese)
[8]薛薇.航空推进系统状态监视、故障诊断研究及仿真验证[D].西北工业大学,2010. XUE Wei.Thesteady-state condition monitoring and fault diagnosis for aircraft gas turbine and simulation[D].Xi'an:Northwestern Polytechni-cal University,2010.(in Chinese)
[9]孙丰诚.航空发动机性能寻优控制技术研究[D].南京航空航天大学,2007. SUN Fengcheng.Research on aeroengine performance seeking control [D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2007.(in Chinese)
[10]MuellerF D,Nobbs S G.Dual engine application of the performance seeking control algorithm[R].AIAA-93-1822.
[11]陶金伟.航空发动机组态建模仿真技术研究[D].南京航空航天大学,2009. TAO Jinwei.Research on configuration modelingand simulation technology for aeroengine [D].Nanjing:Nanjing University of Aeronautics and Astro-nautics,2009.
[12]杨士权.航空发动机执行机构故障诊断与容错控制[D].南京航空航天大学,2013. YANG Shiquan.Actuator fault diagnosis and fault-tolerant control of aeroengine[D].Nanjing:Nanjing University of Aeronautics and Astro-nautics,2013.(in Chinese)
[13]蒋平国.航空发动机数控系统执行机构回路故障诊断和容错控制方法[J].航空动力学报,2005,20(2):282-286. JIANG Pingguo.Method of fault diagnosis and fault-tolerant control for actuator loop in aeroengine digital control system [J]. Journal of Aerospace Power,2005,30(2):282-286.(in Chinese)
[14]韩冰洁,缑林峰.基于卡尔曼滤波器组的执行机构故障诊断方法[J].计算机仿真,2013,30(2):93-96. HAN Bingjie,GOU Linfeng.Actuator fault diagnosis based on Kalman filter bank[J].Computer Simulation,2013,30(2):93-96.(in Chinese)
[15] Chien S H.General two-stage extended Kalman filters [J]. IEEE Transactons on Automatic Conrol,2003,48(2):21-26.
[16]Kobayashi T.Application of a constant gain extended Kalman filter for in-flight estimation of aircraft engine performance parameters[R]. NASA-TM-2005-2213865.
(编辑:张宝玲)
Actuator Fault State Parameter Estimation of Aeroengine Based on On-Board Real Time Model
HE Jia-qian,LI Jian-rong,ZHANG Zhi-shu
(AVIC Shenyang EngineDesign and Research Institute,Shenyang 110015,China)
Abstract:In order to perform fault diagnosis on main combustion fuel supply quantity controller,the nozzle throat area controller,fan inlet guide vane angel controller and compressor inlet guide vane angle controller for aeroengine,the on-board real time nonlinear model was established based on n+1 residual method,and actuator control parameter estimator was established combining with constant gain extended Kalman filter.The actuator soft fault within the whole flight envelope was simulated by a nonlinear component-level model.The simulation result shows that actuator control parameter estimator provides high precision and stability within the whole flight envelope.
Key words:fault diagnosis;actuator;control parameter estimator;on-board real time model;flight envelope;control system;aero-engine
中图分类号:V263.6
文献标识码:A
doi:10.13477/j.cnki.aeroengine.2016.03.007
收稿日期:2015-12-21基金项目:航空动力基础研究项目资助
作者简介:何佳倩(1990),女,在读硕士研究生,研究方向为航空发动机总体性能;E-mail:hejiaqian1990@gmail.com。