压电驱动器控制电路的研制
2016-07-06程旭东
程旭东

摘 要:微定位技术是现代高科技产业和现代工业发展中的一项关键技术,在微操纵、精密测量和精密制造等领域有着广泛的应用。研制了四通道压电驱动器控制电路,用于控制压电陶瓷实现微位移。压电陶瓷是根据逆压电效应来产生微位移和力的器件,具有体积小、功耗低、不发热、抗干扰能力强等诸多优点,但其固有的迟滞和蠕变特性严重影响了它的定位精度。驱动电源的品质直接影响系统的测量精度,而目前市场上在售的压电陶瓷驱动电源的输出电压、体积、输出通道数均难以满足课题需求。本文围绕压电陶瓷驱动器开展研究,以ARM LPC1768单片机为核心,研制能够满足要求的压电驱动器控制电路。
关键词:压电陶瓷;微定位;LPC1768
0 引言
本文主要介绍了多通道压电驱动器控制电路的设计和实验分析。压电陶瓷驱动器是利用压电晶体的逆压电效应,将电能转化为机械能,以实现驱动控制的目的。目前按照控制方式可分为电流控制型和电压控制型[1]。实验主要采用六位半数字万用表测量高压放大器输出端电压和干涉仪测量压电陶瓷微位移的方式。通过测量输出端电压,可以得到控制电压与输出电压的关系,再通过干涉仪测量压电陶瓷微位移,得到电压与压电陶瓷微位移的关系。
1 系统总体概述
本压电驱动器控制电路共有四路输出,可以控制4个压电陶瓷同时工作,控制电路的总体框如图1所示。单片机通过USB口或以太网口接收上位机发送的指令,经过运算、处理,单片机发送控制信号和数据信号控制数模转换器输出模拟电压,模拟电压经过高压放大器放大,控制压电陶瓷实现微位移,SPI口用于将微控制器转换成压电陶瓷微位移信号传输至其他设备。
2 压电驱动器控制电路硬件设计
2.1 控制电路的电源模块设计
控制电路的电源模块主要包括DC/DC转换电路、脉冲宽度调制电路和变压器升压电路。DC/DC转换电路将+5V电压转换为±12V电压输出,脉冲宽度调制电路根据输出电压反馈信号输出两路可调占空比的脉冲,两路输出脉冲形成推挽输出,结合变压器升压电路将幅值为12V的脉冲电压转换成160V直流电压,给高压放大器供电。DC/DC转换电路以TRACO POWER的TSM0512D芯片为核心组成,此芯片将USB口输入的+5V电压转换成±12V电压输出,该芯片具有效率高、输出单双电压自隔离等优点。-12V电压直接供给高压放大器的低电压输入端;+12V电压一方面给脉冲宽度调制电路提供电源,另一方面通过脉冲宽度调制电路和变压器升压电路将其转换为+160V高壓。
2.2 高压放大电路的设计
本压电陶瓷驱动器控制电路输出部分采用的是高压运放式原理,数模转换器输出的控制电压经过高压放大器放大,控制压电陶瓷产生微位移。本论文选用美国APEX公司PA系列型号为PA341的高压线性放大器,该放大器是一种高压、低静态电流的MOSFET线性放大器,输出电流最大为120mA,转换速率为30V/uS,工作电压最高可达350V,具有很高的电源电压抑制比。PA341集运算放大电路、功率放大电路和保护电路于一体,提高了电路的集成度和电路的可靠性。
2.3 控制电路的通信接口
本设计主控芯片采用NXP公司的LPC1700系列ARM微控制器,此系列微控制器是基于第二代ARM Cortex-M3内核的微控制器,是具有高性能与低功耗的32位微控制器[2],基于课题需要选择型号为ARM LPC1768的微控制器,该微控制器集成了以太网MAC、USB主/从机、UART和SPI等通信接口。本课题用到的LPC1768外设主要有以太网MAC、SPI和UART。通过以太网MAC及以太网收发器将本控制电路连接到以太网,即可在以太网内部远程发送指令控制压电陶瓷实现微位移;SPI端口用于将微控制器LPC1768处理的压电陶瓷位置传输至外部设备;UART通用串口用于将控制电路与上位机连接,连接上位机后,可通过上位机发送指令,驱动压电陶瓷实现微位移。
3 微控制器LPC1768的程序设计
系统初始化主要是微控制器LPC1768初始化,而微控制器LPC1768初始化主要是完成系统时钟、系统定时器和引脚的配置,以及LPC1768微控制器的时钟产生。UART0的初始化,包括引脚功能的选择、波特率的设置和串口中断的开启等。其波特率的设置流程如图2所示,用于确定参数DLMSB、DLLSB、MULVAL及DIVADDVAL的值。
已知波特率BR=9600bps(bits per second),外设时钟=25MHz,计算:
4 实验数据分析
4.1 压电驱动器的纹波实验
实验实测的最大纹波电压约为25mV,随着电压的升高,纹波电压有少许的上升,分析原因可能是随着电压的升高,电路之间的串扰加强,导致纹波电压有少许的升高。
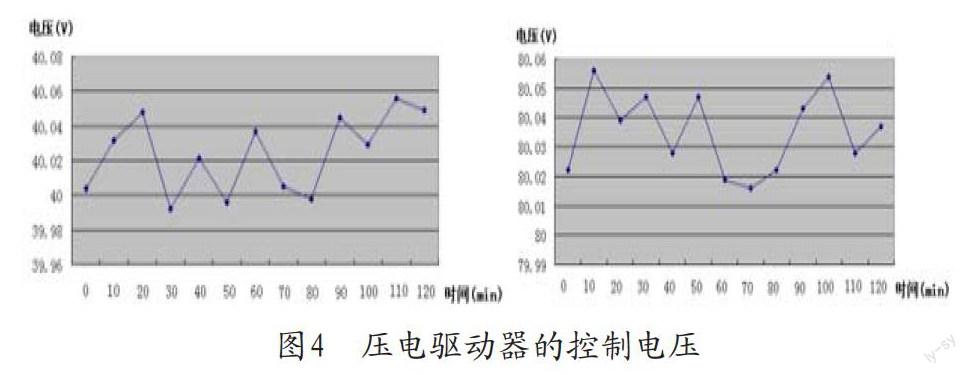
4.2 压电驱动器的稳定性实验
由图3可知,随着控制电压的升高,电压的波动范围逐渐增大,稳定性降低,主要是由于电压升高后,电阻的热效应以及负载的特性参数变化而引起的[2]。
4.3 压电驱动器重复性实验
由实验测试数据可知反行程的最大重复性偏差[3]=65nm,取这两个偏差中较大者为重复性偏差,故==69nm。则用满量程(yFS)百分比所表示的重复性为:=±(/yFS)×100%=±(69/8500)×100%=0.812%。
参考文献
[1]王宏.压电驱动器控制系统的研制[D].成都:电子科技大学,2004.
[2]刘泊,郭建英,孙永全.压电陶瓷微位移驱动器建模与控制[J].微纳技术与精密机械,2013(6):1503-1509.
[3]张桂林,张承进,赵学良.压电驱动器记忆特性迟滞非线性建模[J].微纳技术与精密机械,2012(5):30.
(作者单位:中国电子科技集团公司第八研究所)
