改进Zernike矩亚像素边缘检测算法研究
2016-07-06于微波马艳辉刘芳雪刘克平
于微波,马艳辉,刘芳雪,刘克平
(长春工业大学 电气与电子工程学院,吉林 长春 130012)
改进Zernike矩亚像素边缘检测算法研究
于微波,马艳辉,刘芳雪,刘克平
(长春工业大学 电气与电子工程学院,吉林 长春 130012)
摘要:针对Ghosal算法检测出的边缘较粗以及手动反复调节阶跃强度阈值引起的效率低的问题,提出了一种改进算法。首先,推导出模板系数,并计算得出Zernike矩。其次,利用推导出的公式计算出距离阈值和边缘阈值,利用Otsu法计算得到最佳阶跃强度。最后,通过设计三组实验,来验证改进算法的有效性。实验证明,改进算法能够更加有效地检测出图像的边缘,减少伪边缘的存在并且细化了边缘,提高了定位精度,同时降低了算法的执行时间。
关键词:Zernike矩;边缘检测;亚像素;大津法
边缘检测在机器视觉领域中不可或缺的一种技术。传统的边缘检测方法有Sobel算子、Roberts算子、Canny算子[1-2]等。至今为止,边缘检测算法已有不短的发展史,但仍不完善,还在不断改善中。这些算子只能检测到像素级水平,然而在许多实际应用中,却并不能满足要求,达到满意的效果。例如,在机器视觉领域,工件的边缘定位精度至关重要,直接影响着整个被测工件的测量结果。因此,亚像素级定位得到了广泛关注,具有很实用的价值。
亚像素级边缘检测其实就是将边缘附近的像素进行细分,实现边缘精确定位。常用的边缘检测算法有空间矩法、插值法、拟合法。插值法计算比较简单,但容易受噪声的影响。拟合法虽然能够获得较好的边缘,但计算量比较大,所需要的模型比较复杂。Hueckel首先提出亚像素边缘检测算法[3],定位精度可以达到0.1个像素。Lyvers等人提出了空间矩检测算法[4],利用6个空间矩计算4个参数,计算量较大。Ghosal等人首次提出了利用Zernike正交矩计算参数[5]实现亚像素边缘检测。但这种算法没有考虑模板放大效应,计算结果有较大的误差。文献[6]考虑了模板放大效应,但检测的边缘仍然较粗,边缘定位精度低。文献[7]提出了Zernike矩结合小波变换的方法,利用模极大值进行粗定位,再用Zernike矩精确定位,这种方法运算复杂。本文提出了一种改进的Zernike矩亚像素边缘检测算法。实验结果表明,本算法具有较好地边缘检测效果。
1Zernike矩及亚像素边缘检测原理
1.1Zernike矩
根据Zernike多项式定义,可得到具有正交、旋转不变特性的Zernike矩[8-9]。Zernike 多项式定义为
Vnm(ρ,θ)=Rnmeimθ
(1)
(2)
(3)
本文用到的部分正交实值多项式如表1所示。
表1Zernike正交实值多项式
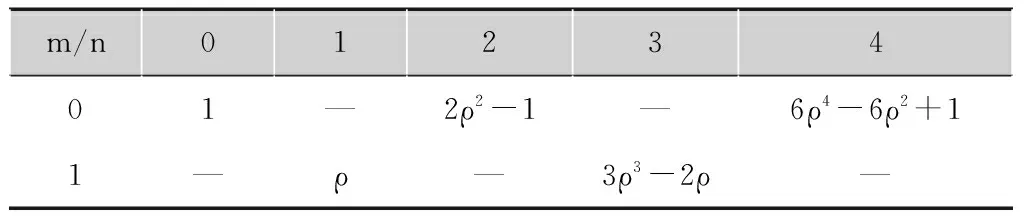
m/n0123401—2ρ2-1—6ρ4-6ρ2+11—ρ—3ρ3-2ρ—
(4)
1.2Zernike矩亚像素边缘检测原理

(5)
从式(5)可以看出,图像旋转前后相角发生改变,这称为Zernike矩的旋转不变性。利用旋转后的Zernike矩可以很容易计算出边缘参数,从而实现对边缘的亚像素定位。
图1为图像的亚像素边缘检测理想模型。圆内L两侧的灰度值分别为h和h+k,k为阶跃灰度,l为圆心到边缘的垂直距离;φ为l和x轴的夹角。图1b为图1a旋转角度φ后的模型。

图1 亚像素边缘检测理想模型

(6)
(7)
(8)
(9)
(10)
由式(6)、(7)、(8)可以得到边缘的3个参数l,k,h,表示为
(11)
(12)
(13)

(14)

(15)
由式(11)、(12)、(13)、(15),可以得出亚像素边缘检测公式为
(16)
(17)
1.3Otsu阈值法原理
Otsu法[12]利用图像的灰度直方图,以目标和背景的类间方差为测度准则[13],当该测度准则函数取最大值时,得到最佳的阈值。
(18)
由以上分析可知,当σ2取最大值时得到的阈值为最佳阈值,此时图像的分割效果也是最好的。
2改进Zernike算法
2.1Zernike模板系数
通过Zernike矩计算像素点的4个参数,利用这四个参数可以判断该像素点是否为边缘点。因此,计算Zernike矩的模板系数是边缘检测的关键步骤。
Ghosal推导了Zernike矩Z00,Z10,Z205×5的模板系数[14]。本文采用Zernike7×7模板系数,图2为Zernike7×7模板。
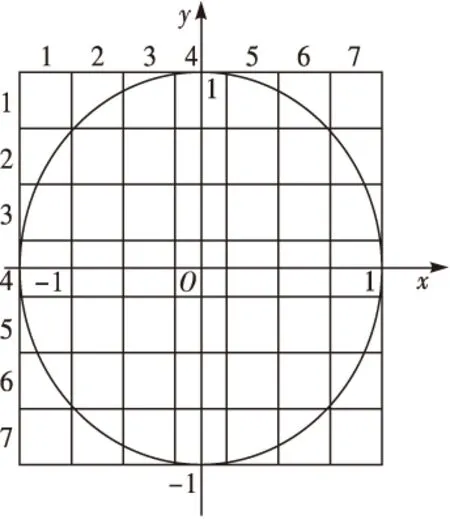
图2 Zernike 7×7模板
2.2改进Zernike算法步骤
Ghosal等提出的Zernike矩亚像素边缘检测算法,利用3个Zernike矩计算出l,k,h,φ。边缘点的判断条件为k≥kt∩l≤lt,其中kt,lt为阈值。lt的变化范围较小,容易选择。kt变化范围较大,而且对判断结果有较大影响,过小容易出现较多的伪边缘,过大会丢失较多的有用边缘。Ghosal算法通过手动反复调节kt的值,这种方法不仅耗时,而且不能保证检测精度。针对上述情况,提出了Otsu法计算最佳阈值kt。
改进的Zernike矩亚像素边缘检测算法具体实现过程如下:
步骤1:计算7×7模板系数;
步骤2:利用模板系数与每个像素的卷积计算得到Zernike矩Z00,Z11,Z20;
步骤3:根据式(15)计算边缘角度φ;
步骤4:根据式(11)和式(12)计算l和k;
步骤5:将k取绝对值,利用Otsu法得到最佳阶跃灰度阈值kt;
步骤6:如果像素点满足k≥kt∩l≤lt,则该像素点是边缘点,然后利用式(17)计算亚像素坐标。
3实验结果及分析
为验证改进算法的有效性,本文设计了3组实验,3组实验都是利用MATLAB2008a工具实现的。
第一组实验采用一幅人工制作的大小为256×256的图像,如图3所示。该实验是为了提取边缘点的亚像素坐标。图像第71行至180行和第71列至176列区域内为1,背景为0。分别采用Ghosal算法和改进的Zernike矩算法计算图像的亚像素坐标。图像的上边缘在70行和71行之间,因此亚像素坐标应该是70.5。以图像的第81列至85列为例,得到的亚像素坐标如表2所示。从表2可以看出,Ghosal算法计算出的亚像素坐标误差较大,原因是没有考虑模板放大效应。而改进的Zernike矩亚像素坐标误差仅为0.01数量级。实验数据表明,改进的Zernike矩亚像素边缘检测精度更高。
第二组实验选用的是大小为512×512的cameraman灰度图像。边缘检测结果如图4所示。其中图4a是原始图像,图4b是Ghosal算法5×5模板边缘检测图像,图4c是Ghosal算法7×7模板边缘检测图像,图4d是改进Zernike算法边缘检测图像。由图4b和图4c
图3 人工制作图像
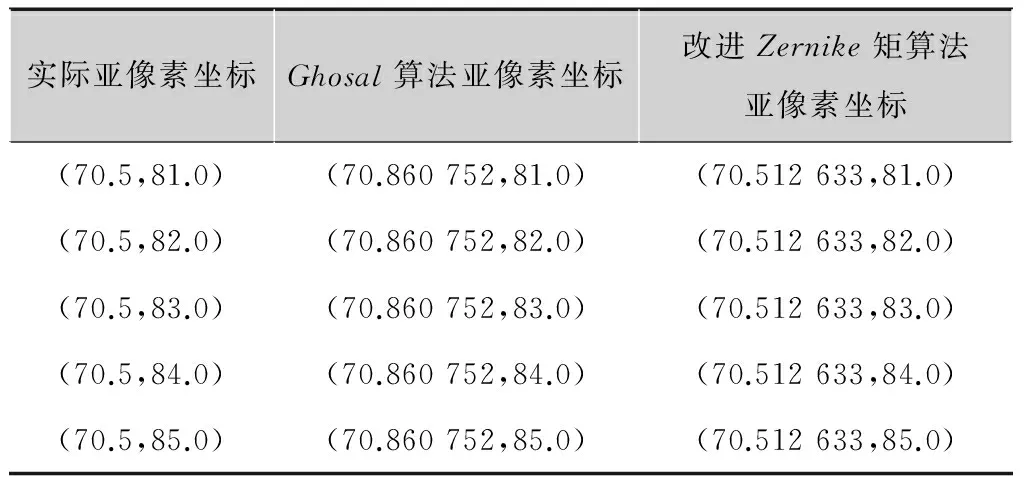
实际亚像素坐标Ghosal算法亚像素坐标改进Zernike矩算法亚像素坐标(70.5,81.0)(70.860752,81.0)(70.512633,81.0)(70.5,82.0)(70.860752,82.0)(70.512633,82.0)(70.5,83.0)(70.860752,83.0)(70.512633,83.0)(70.5,84.0)(70.860752,84.0)(70.512633,84.0)(70.5,85.0)(70.860752,85.0)(70.512633,85.0)
可以看出,7×7模板边缘检测伪边缘较少,基本保持了边缘轮廓。图4c和图4d可以看出,改进的Zernike算法相比Ghosal算法边缘较细,图4d轮廓清晰,即降低了伪边缘的出现又很好地反映了图像的边缘信息。
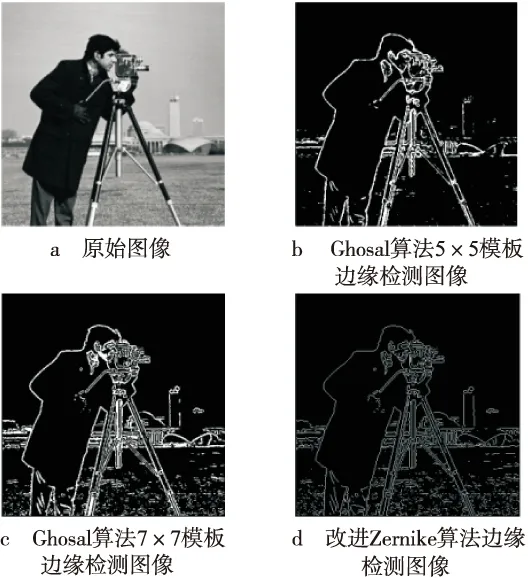
图4 人像边缘检测图
第三组实验采用一幅大小为768×1 024的工业零件图像。边缘检测结果如图5所示。其中图5a是原始图像,图5b是Ghosal算法5×5模板边缘检测图像,图5c是Ghosal算法7×7模板边缘检测图像,图5d是改进Zernike矩亚像素边缘检测图像。从图5可以看出,7×7模板Ghosal算法相比5×5模板Ghosal算法清晰度高。7×7模板Ghosal算法和改进Zernike矩算法都能很好地检测出图像的亚像素边缘。伪边缘较少,能够很好地保持图像的边缘信息,但Ghosal算法边缘较粗。实验结果表明,改进Zernike矩亚像素边缘检测算法能够很好地检测出图像的边缘,并且能够减少伪边缘的存在,定位精度比较精确。
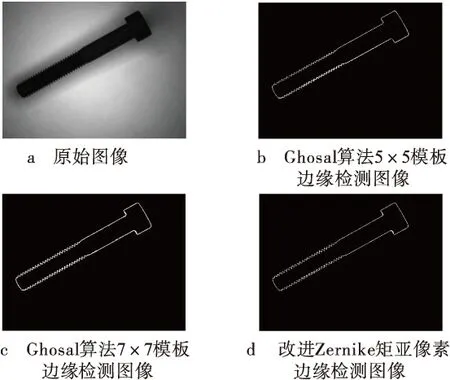
图5 工件边缘检测图
4结束语
针对Ghosal算法边缘较粗的问题,本文提出了一种不同于Ghosal算法的阶跃强度判断条件以及模板系数。利用Otsu法求出最佳的阶跃强度阈值,且模板大小增大到7×7。通过Otsu自动求取阈值减少了反复调节kt的次数,提高了工作效率,降低了手动反复调节带来的误判。实验结果表明,改进的Zernike矩亚像素边缘检测算法能够很好地检测出图像的边缘,并且细化了边缘,减少了伪边缘的存在,提高了定位精度。
参考文献:
[1]文永革,何红洲,李海洋.一种改进的Roberts和灰色关联分析的边缘检测算法[J].图学学报,2014,35(4):637-642.
[2]李丹丹,侯涛,魏世鹏.基于改进Canny算子的铁轨边缘检测算法[J].电视技术,2015,39(8):55-58.
[3]HueckelMH.Anoperatorwhichlocatesedgesindigitizedpictures[J].Journaloftheassociationforcomputingmachinery,1971,18(1):l13-l25.
[4]LYVERSEP,MITCHELLOR,AKEYML,etal.Subpixelmeasurementsusingamoment-basededgeoperator[J].IEEEtransactionsonpatternanalysisandmachineintelligence,1989,11(12):1293-1308.
[5]GHOSALS,MEHROTRAR.OrthogonalmomentoperatorforSubpixeledgedetection[J].Patternrecognition,1993,26(2): 295-306.
[6]李金泉,王建伟,陈善本,等.一种改进的Zernike正交矩亚像素边缘检测算法[J].光学技术,2003,29(4):500-503.
[7]唐坚刚,林新,任琳,等.一种改进的亚像素边缘检测方法[J].信息技术,2014(3):1-4.
[8]魏本征,赵志敏,华晋,等.基于改进形态学梯度和Zernike矩的亚像素边缘检测方法[J].仪器仪表学报,2010,31(4):838-844.
[9]TEAGUEMR.Imageanalysisviathegeneraltheoryofmoments[J].JournaloftheopticalsocietyofAmerica,1980,70:920-930.
[10]张宝峰,王明跃,朱均超,等.一种零件图像亚像素边缘检测算法[J].计算机仿真,2014,31(2):288-292.
[11]王吉林,赵力.基于改进Zernike矩法的电缆护套材料亚像素厚度测量[J].计算机测量与控制,2010,18(4):782-784.
[12]OTSUN.Athresholdselectionmethodfromgray-levelhistograms[J].IEEEtransactionsonsystemsmanandcybernetics,SMC29,1979,9(1):62-66.
[13]杨浩,裴蕾,李昌顺,等.基于Zernike矩亚像素边缘检测的快速算法[J].计算机应用研究,2011,28(11):4380-4382.
[14]高世一, 赵明扬, 张雷, 等.基于Zernike正交矩的图像亚像素边缘检测算法改进[J].自动化学报,2008,34(9):1163-1168.
于微波(1970— ),女,硕士生导师,主要研究方向为智能仪器与智能控制;
马艳辉(1989— ),硕士生,主研图像处理;
刘芳雪(1989— ),女,硕士生,主研图像处理;
刘克平(1971— ),硕士生导师,主要研究方向为工业机器人。
责任编辑:闫雯雯
Research of improved subpixel edge detection algorithm using Zernike moments
YU Weibo, MA Yanhui, LIU Fangxue, LIU Keping
(SchoolofElectrical&ElectronicEngineering,ChangchunUniversityofTechnology,Changchun130012,China)
Abstract:The principle of sub-pixel edge detection based on Zernike moments is introduced in this paper. With the consideration of the limitation of the sub-pixel edge detection algorithm by Ghosal, such as the lower location precision of the edge and the extracted wider edge than that of the original image, an improved algorithm is proposed. First of all, a mask of size seven by seven is calculated and Zernike moment is calculated. Secondly, the distance threshold and edge threshold are calculated by using the formula, and the best intensity of step is calculated by using Otsu method. Finally, a series of experiments are designed and it verity the validity of the improved algorithm. The experiment results show that the improved algorithm can effectively detect the edge, it reduces the existence of false edge and refines edge, and it can enhance the inspection accuracy and reduces the execution time of the algorithm
Key words:Zernike moments; edge detection; subpixel; Otsu
中图分类号:TN911.73
文献标志码:A
DOI:10.16280/j.videoe.2016.06.027
基金项目:吉林省科技发展计划项目(20140204018GX); 吉林省中青年科技创新领军人才及团队项目(20150519009JH)
作者简介:
收稿日期:2015-08-14
文献引用格式:于微波,马艳辉,刘芳雪,等. 改进Zernike矩亚像素边缘检测算法研究[J].电视技术,2016,40(6):144-148.
YU W B, MA Y H, LIU F X. Research of improved subpixel edge detection algorithm using Zernike moments[J].Video engineering,2016,40(6):144-148.
