模糊自适应三电平PWM整流器的研究
2016-07-05张月光曹俊伟徐胡平
张月光,曹俊伟,徐胡平
(国网上海市电力公司奉贤供电公司,上海 201400)
模糊自适应三电平PWM整流器的研究
张月光,曹俊伟,徐胡平
(国网上海市电力公司奉贤供电公司,上海201400)
摘要:传统PWM整流器的线性和非线性控制往往依据系统的数学模型,而考虑到实际系统运行时的各种因素,建立PWM整流器的精确数学模型是不可能的。以二极管嵌位式三电平PWM整流器为研究对象,设计了一种不需要被控对象数学模型的模糊自适应PI控制器,对控制器参数在线进行调整,以提高系统的动、静态性能。在Matlab/Simulink仿真环境下,搭建了三电平PWM整流器控制系统,并对仿真结果进行了深入分析,验证了控制策略的正确性和可行性。
关键词:三电平PWM整流器;空间矢量调制;模糊自适应
随着高压大容量电力电子装置的广泛使用,二极管嵌位式三电平PWM整流器及其控制技术正逐渐成为PWM整流技术中的研究热点,二极管嵌位式三电平PWM整流器具有如下显著优点[1,2]:(1) 主电路每个功率器件关断时承受的电压仅为母线电压的一半;(2)三电平PWM整流器交流侧电压形状更接近于正弦波,在相同的开关频率下,谐波比两电平要低得多;(3)开关损耗小,系统的效率高;(4)在相同的直流母线电压条件下,较之两电平变换器,开关器件所承受的du/dt大为减少。因此,本文将对二极管箝位式三电平PWM整流器及其控制方法进行深入的研究。
1三电平PWM整流器主电路分析
二极管嵌位式三电平PWM整流器的主电路拓补结构如图1所示。

图1 二极管嵌位式三电平PWM整流器拓补结构
从图1可以看出,二极管嵌位式三电平PWM整流器的主电路主要由交流侧电感、电阻、由功率开关管和续流二极管搭建的开关桥路、直流侧电容和负载组成。假设母线中点电位平衡,则两个电容上的电压相等,即:Udc1=Udc2=Udc/2; RL为等效负载电阻。
三电平PWM整流器通过控制功率开关器件Ti1-Ti4=(i=a、b、c)的导通和关断,使得A、B、C三相桥臂的端电压为双极性PWM调制脉冲序列。对于三电平PWM整流器,其功率开关管的工作状态可以由表1中的开关状态表示。对于A相桥臂,开关状态P表示桥臂上端的两个开关管导通,整流器A端相对于中点Z的端电压UAZ为Udc/2,同样的,N表示下端两个开关管导通,此时,UAZ为-Udc/2。开关状态O表示中间两个开关管导通,此时嵌位二极管将UAZ嵌位在零电压上。
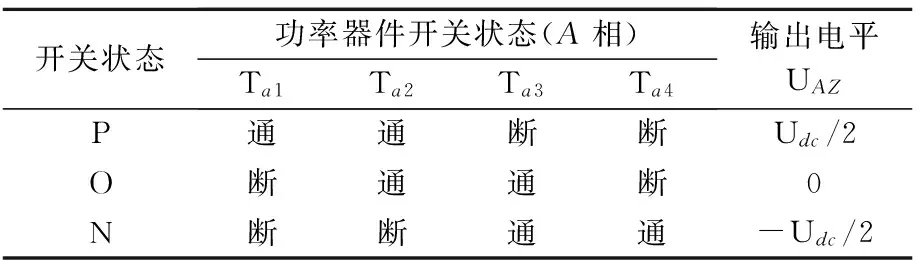
表1 三电平PWM整流器的开关状态表
从表1可以看到,功率开关器件Ta1和Ta3运行在互补模式,即一个开关导通,另一个必须关断。同样,Ta2和Ta4也运行在互补模式。三电平PWM整流器的开关器件用开关函数描述:
(1)
2空间矢量调制算法
三电平PWM整流器的主电路拓补结构的每相桥臂可以输出P,O,N三种电压状态,将三相输出电压状态进行组合可以得到27种空间电压矢量,如图2所示[3]。
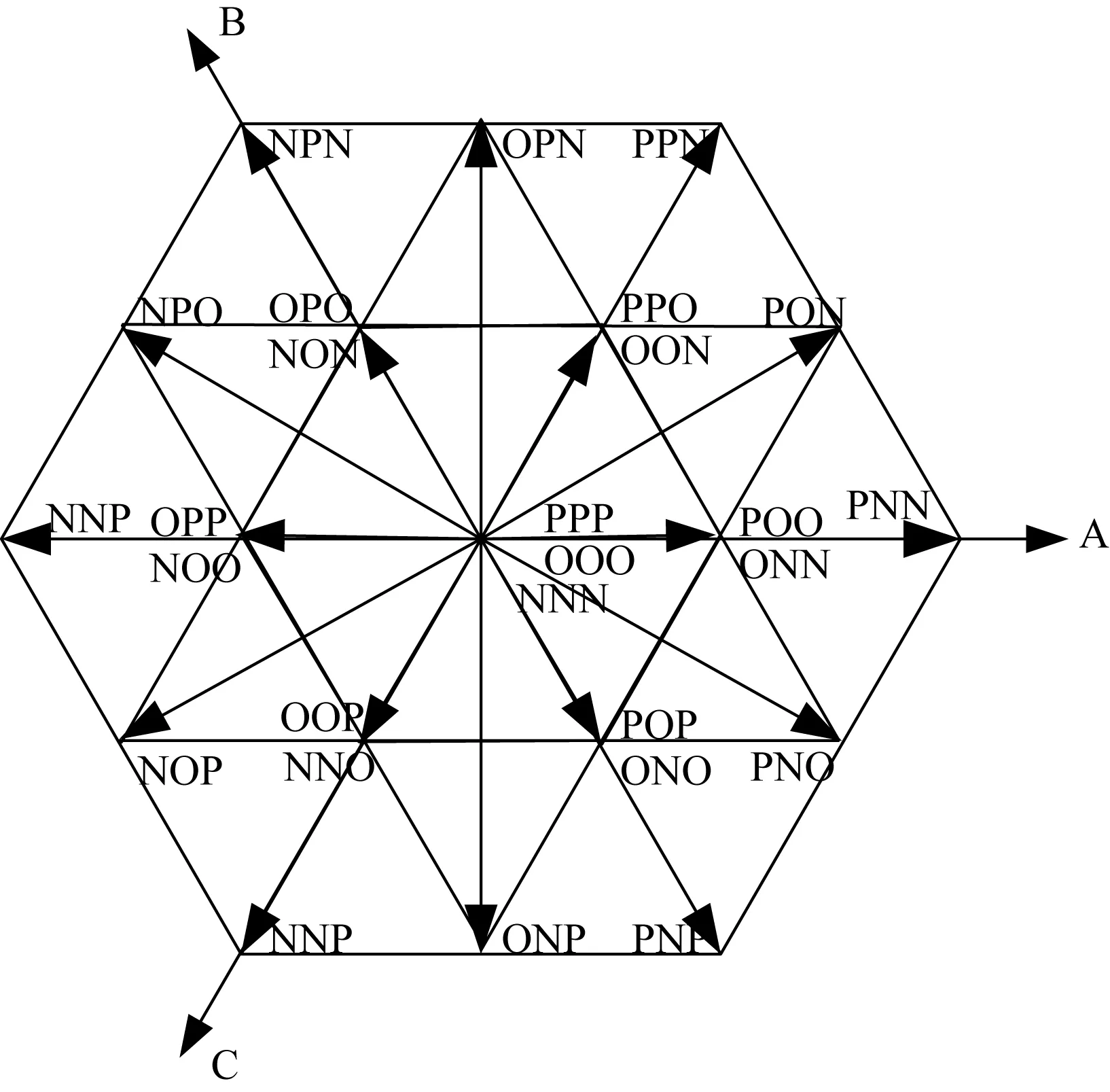
图2 三电平整流器空间电压矢量示意图
按照空间电压矢量幅值由小到大可将其分为四类:零矢量、小矢量、中矢量和大矢量,空间电压矢量的表达式为:
(2)
式中Sa,Sb,Sc——A,B,C三相的输出状态。

2扇区号判断
2.1大扇区判断
由图2可知,六个大矢量将空间电压矢量平面划分为六个大三角形区域,因此可以根据参考电压矢量的旋转角度θ来进行大扇区判断(见表2)。
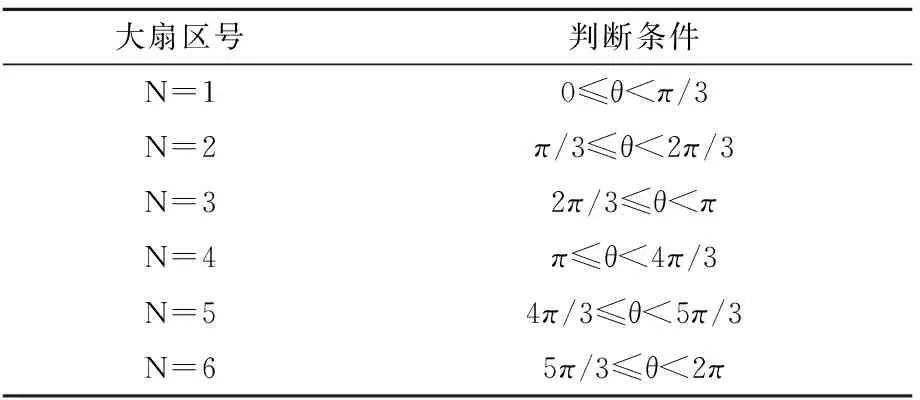
表2 大扇区号判断表
2.2小扇区判断
6个大矢量将空间电压矢量平面划分为6个大三角形区域,以第一大扇区为例,此时,其中包含的矢量又将第一大扇区分为6个小扇区,具体如图3所示。
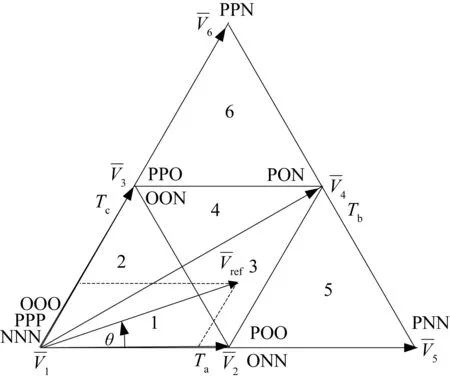
图3 小扇区划分图
由图3可知,可以根据参考矢量的幅值和相角判断小扇区的位置,令参考电压矢量的幅值为m,小扇区的判断表如表3 所示。
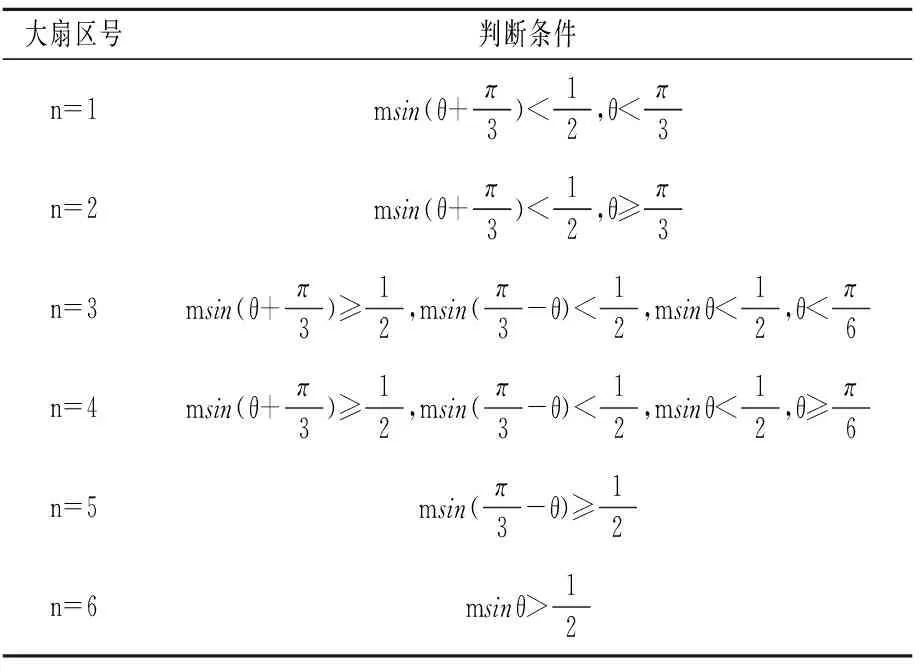
表3 小扇区号判断表
2.2矢量作用时间计算
(3)
则空间矢量的作用时间为:
(4)
3模糊自适应控制器的设计
模糊控制系统是指那些与模糊概念和模糊逻辑有直接关系的系统,由模糊规则库、模糊推理机、模糊化和反模糊化四部分组成[5],如图4所示。

图4 模糊逻辑系统的基本组成
模糊规则库和模糊推理机是模糊逻辑系统的关键部分。模糊规则来源于专家对于系统变化过程的认识与经验总结,模糊规则库中模糊规则的完善程度及准确度将直接确定整个系统作用效果的好坏[6]。模糊规则库由具有多输入单输出形式的若干条模糊规则“if-then”的总和所组成[7],即:
(5)

PWM整流器本身为一个非线性系统,传统控制理论主要解决线性系统的问题,而对于那些很难提出数学方程但人们却有丰富的控制经验的实际课题,如三电平PWM整流器,模糊控制技术可以发挥其特有的优势。
模糊自适应PI控制是在传统PI控制算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊控制原理来对两个参数进行实时的修改,以满足不同e和ec时对控制参数的不同要求,模糊自适应PI控制器的结构如图5所示。
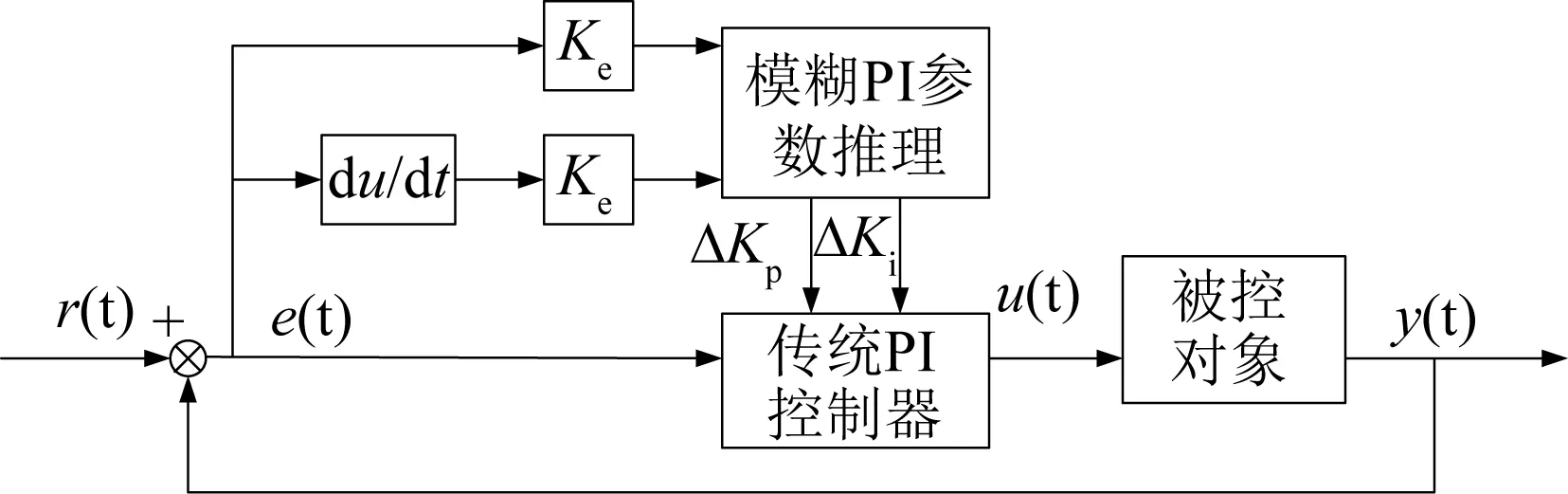
图5 模糊自适应PI控制器
不同e和ec对PI控制器参数Kp、Ki自动调整要求如下[8,9]:
(1)当e较大时,应取较大的Kp,去掉积分作用,即Ki=0。
(2)当e中等时,应取较小的Kp,同时适当选择Ki。
(3)当e较小时,应取较大的Kp和Ki。
根据上述的参数整定原则,列出Kp和Ki的参数调整控制规则表,如表4和表5所示。
4模糊自适应PI控制器在PWM整流器的应用
PWM整流器电压外环的控制目的是使得母线电压恒定,这就要求电压外环的系统响应不仅
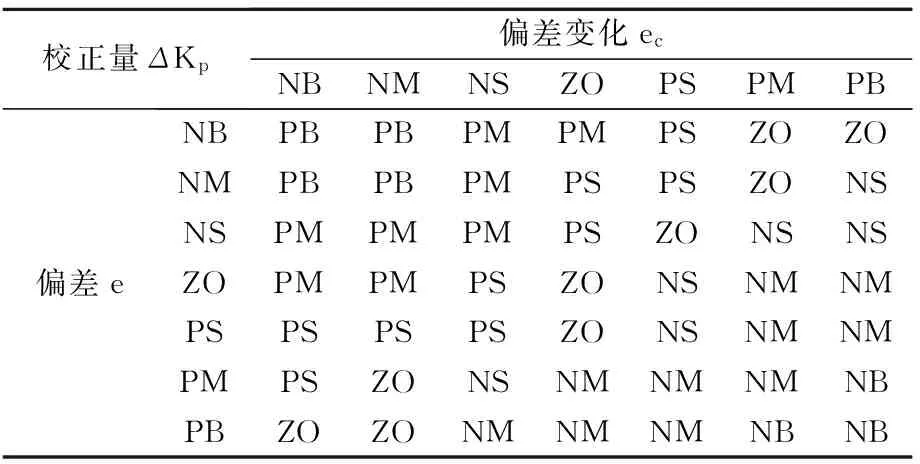
表4 Kp的模糊规则表

表5 Ki的模糊规则表
要有良好的动态性能,而且要有较好的鲁棒性和抗扰性,为了有效的调整系统控制器参数,同时减少繁琐的实验参数调试过程,可以在电压外环采用模糊自适应PI控制器,结合模糊控制和传统PI控制的共同优点,使得系统具有更好的动、静态性能。基于模糊自适应PI的三电平PWM整流器控制图如图6所示。

图6 基于模糊自适应PI的三电平PWM整流器框图
以3kW三电平PWM整流器系统为例,稳态时直流母线电压值为600V,对于模糊控制器来说,输入变量的论域,根据专家经验,如果认为系统偏差的值大于等于30V,就应该认为是语言值的最大值“PB”;e的值小于等于-30V,就是“NL”。因此,偏差e的论域为[-30,30],则:Ke=0.2
类似于偏差e,根据被控对象在系统运行中偏差变化ec的范围,选择ec的论域及系数Kc。因为:
e(t)=r(t)-y(t)
当输入r(t)为常数时,dr(t)/dt=0,则
(6)

Kc=6÷963.5=0.006 227
为了验证模糊自适应PI控制方法设计的合理性与可行性,在Matlab/Simulink仿真环境下搭建三电平PWM整流系统进行仿真实验
系统仿真时间设置为2s,在0.2s空载启动PWM整流,在0.8s系统加额定负载,在1.4s启动直流侧受控电流源,开始能量回馈实验,仿真过程直流母线电压波形如图7所示。
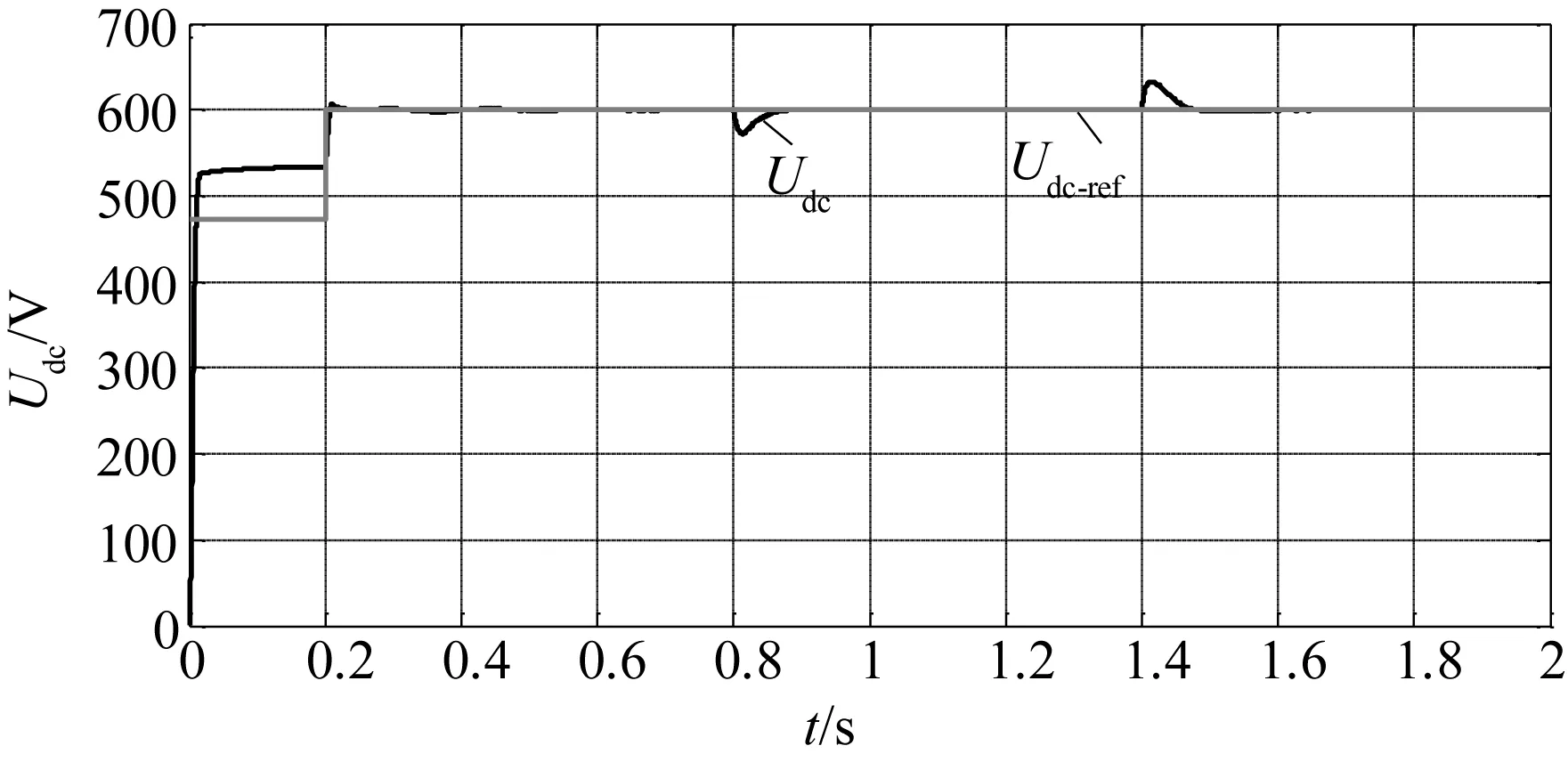
图7 直流母线电压波形
从图7可以看出,系统空载启动过程,超调为6V,约为稳态值的1%,与传统PI控制相比,超调量明显减小,并在0.22秒恢复稳定,响应迅速;系统加载时,电压降为25V,约为稳态值的4.1%,并在0.88秒恢复稳定,与传统PI控制相比,系统抗扰性能明显提高。
5结语
本文以二极管嵌位式三电平PWM整流器为研究对象,分析了其主电路拓补结构及空间矢量调制算法,详细介绍了模糊控制的基本原理,将模糊控制和传统的PI控制相结合,给出了模糊自适应PI控制器的设计方法;由于PWM整流器本身为一个非线性系统,其精确模型获取困难,本文将模糊自适应PI控制器应用在三电平PWM整理器控制系统的电压外环,并在Matlab/Simulink仿真环境下通过仿真验证模糊自适应PI控制方法的正确性和合理性,最后给出了仿真波形并进行了详细的分析。
参考文献:
[1]侯庆亮. 三电平PWM整流器控制方法研究[D].北京:北方工业大学,2010.
[2]LEEHD,SULSK.ACommonModeVoltageReductioninBoostRectifier/InverterSystembyShiftingActiveVoltageVectorinaControlPeriod[J].IEEETransPowerElectronics, 2000,15(6): 1094-1101.
[3]BINWu. 大功率变频器及交流传动[M].北京:机械工业出版社.
[4]满永奎,韩安荣. 通用变频器及其应用(第3版)[M].北京:机械工业出版社,2011.
[5]张言俊,张科. 自适应控制理论及应用[M].西安:西北工业大学出版社,2005.
[6]宋进良, 满永奎. 基于模糊控制锅炉给粉远程诊断系统的研究[J]. 东北电力技术,2009,30(6):10-13.
SONGJin-liang,ZHANGLi-sha,MANYong-kui.Studyonremotediagnosissystemforboilercoalfeedingbasedonfuzzycontrol[J].NortheastElectricPowerTechnology,2009,30(6):10-13.
[7]廉小亲. 模糊控制技术[M].北京:中国电力出版社,2003.
[8]刘金琨. 先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[9]陈爽. 基于DSP的模糊自适应PI交流调速系统[D].成都:西南交通大学,2009.
(本文编辑:杨林青)
Research on Fuzzy Self- Adaptive Three-Level PWM Rectifier
ZHANG Yue-guang, CAO Jun-wei,XU Hu-ping
(StateGridFengxianPowerSupplyCompany,SMEPC,Shanghai201400,China)
Abstract:The linear and nonlinear control of traditional PWM rectifier is often based on systematic mathematical model, and it is impossible to establish accurate mathematical model of PWM rectifier based on the actual system operation. This paper designs a fuzzy adaptive PI controller without the mathematical model of controlled subject, which adjusts the controller parameters online in order to improve the dynamic and static performance of the system. In Matlab/Simulink environment, the three-level PWM rectifier control system is constructed and the simulation results are studied, which verifies the correctness and feasibility of the control strategy.
Key words:three-level PWM rectifier; space vector modulation; fuzzy self- adaptation
DOI:10.11973/dlyny201603016
作者简介:张月光(1987),男,硕士,从事电网调度工作。
中图分类号:TM461
文献标志码:A
文章编号:2095-1256(2016)03-0330-05
收稿日期:2016-03-15