智能断电控制系统的A/D转换设计
2016-07-05陆兴华黄冠华
陆兴华,黄冠华
(广东工业大学华立学院,广州 511325)
智能断电控制系统的A/D转换设计
陆兴华,黄冠华
(广东工业大学华立学院,广州511325)
摘要:提出一种改进的基于阻抗匹配滤波放大的智能断电控制系统的A/D转换模块设计方法。进行了智能断电控制系统的整体设计和建模,采用AD9225设计智能断电控制系统的ADSP-BF537并行外设接口,配置SPORT0_TFSDIV寄存器,响应内核中断。设计智能断电控制系统的PID神经网络A/D转换控制算法。整个A/D转换模块包括了模拟信号预处理机、功率放大器、滤波器和电源模块的设计,通过A/D转换实现批量数据转换和数据采样。
关键词:智能断电;控制系统;A/D转换;PID
在大型机电控制系统和电力控制系统中,通常会因为电流过载而导致系统故障,需要对大型机电系统进行智能断电控制,保障整个系统设备的安全可靠运行。随着DSP数字信息处理芯片的发展,采用集成数字处理芯片应用在电力控制系统中成为未来电力系统发展的一个重要趋势。大型机电控制系统的智能断电控制系统主要采用的是ARM控制模块和PXI电源信息分析模块,通过对电源电压、电流以及用电功率的数据采集结果进行信号分析,当电压过载时实现自动断电操作,在智能断电控制系统设计中,功率过载的情况下瞬时电流产生一个电压脉冲,电子被阳极吸引实现电流切断,智能断电控制系统在进行电流信息处理时,需要进行脉冲信号的A/D转换,实现与上位机的硬件控制。研究智能断电控制系统的A/D转换设计方法,是整个断电控制系统设计的基础[1]。
当前,对智能断电控制系统A/D转换模块设计的方法主要采用模拟信号预处理控制方法,通过动态增益制,调整智能断电控制系统的电压信号到合适范围,对采样的断电控制信号进行放大、滤除,实现智能断电系统的A/D转换控制,其中,对智能断电控制系统的A/D转换方法又主要分为基于传感器识别的智能断电控制A/D转换方法、基于时频特征采集的智能断电控制系统的A/D转换方法和基于VXI总线驱动的智能断电控制系统的A/D转换方法等[2-3],但上述方法需要对智能断电系统进行调制滤波,在进行数据的A/D转换会出现电压负载过大或过小的情况,影响整个系统工作的安全性和可靠性。对此,相关文献进行了系统的改进设计,其中,文献[4]设计了一种基于模拟信号预处理机最大功率调制的智能断电控制系统的A/D转换模块,实现对断电信息的采集和处理分析,该控制系统需要对放大器进行精准设计,若系统放大倍数出现偏差,将会影响整个断电控制系统的使用效率[5-7]。针对上述问题,本文提出一种基于阻抗匹配滤波放大的智能断电控制系统的A/D转换模块设计方法,首先进行了智能断电控制系统的整体设计和建模,然后分析了智能断电控制系统的PID神经网络A/D转换控制算法,在此基础上进行了宽频带大功率条件下的智能断电控制系统A/D转换模块的硬件电路设计,最后进行了系统调试和仿真测试,展示了本文设计系统的优越性能。
1系统总体设计描述和算法分析
1.1智能断电控制系统的总体设计描述
为了实现对智能断电控制系统的稳定性工作,需要设计智能断电控制A/D转换器。本文研究的智能断电控制系统的A/D数模转换信号主要为电流信号、电压信号、差压信号、绝压信号。电流传感器等采集信号,由于原始的传感器进行信号采集是模拟数据,需要转换为数字信息实现信号处理和分析,通过对智能断电控制系统的A/D数模转换和数据信息采集以及特征分析,实现对整个机电控制系统的状态的识别、判断和预报。根据上述原理,进行智能断电控制系统的总体设计,机电控制信号通过数据采集器/分析仪进入ARM主控系统,进行基线恢复和功率匹配,采用AD9225设计智能断电控制系统的ADSP-BF537并行外设接口,由此,得到整个智能断电控制系统设计包括信号滤波模块、DSP复位模块、智能断电的动态增益控制模块进而D/A芯片中断初始化模块,设计功率放大器电路以及电源模块进行智能断电系统的低频供电,为了D/A正常工作,还需配置SPORT0_TFSDIV寄存器,响应内核中断。综上描述,得到本文设计的智能断电控制系统总体结构如图1所示。
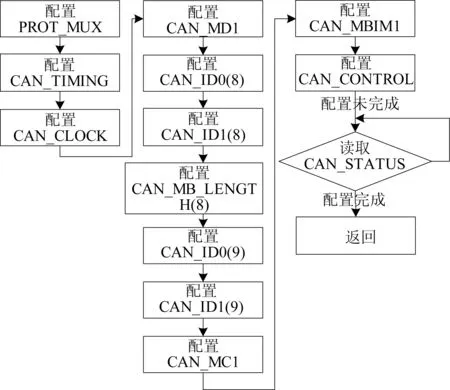
图1 智能断电控制系统的总体设计模型
结合图1分析可知,本文设计的智能断电控制系统的默认的倍频数为10倍,电压必须大于1.2 V,以此需要进行AD转换,实现查询中断标志位判断,系统设计的基础指标描述如下:
(1)智能断电控制系统尺寸为70 mm×50 mm;
(2)智能断电控制系统整体功耗;
(3)智能断电控制系统信号的特征采样率不低于25 MHz;
(4)智能断电控制系统的采样分辨率不低于16位;
(5)CAN收到数据后进行高压控制;
(6)AD转换电力的能谱数据分析具有基线恢复功能。
根据这些指标进行系统设计,智能断电控制系统的设计要求结构简单、功耗低、噪声低。根据智能断电控制A/D转换器的设计方案,结合前期调研和芯片选择,进行系统硬件电路设计。
1.2智能断电A/D转换控制算法分析
在进行硬件模块设计之前,需要进行智能断电系统的A/D转换控制算法的设计和描述,然后将算法写入到DSP芯片中,实现智能断电控制,本文设计的智能断电A/D转换控制算法采用PID神经网络控制算法,选取一个三层前向神经网络作为控制器,图2为PID神经网络结构。
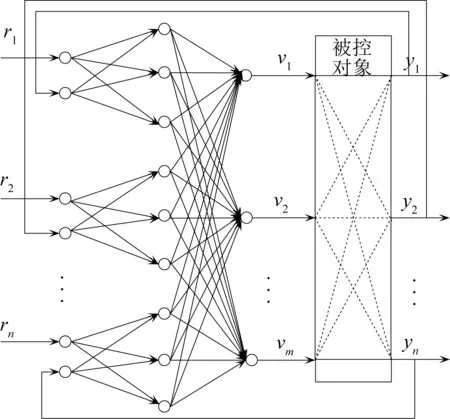
图2 三层前向PID神经网络结构
在智能断电A/D转换控制中采用的神经网络为2×3×1结构,智能断电A/D转换控制的训练向量模式为:
x(t)=(x0(t),x1(t),…,xk-1(t))T

其中ωj=(ω0j,ω1j,…,ωk-1,j)T,表示PID控制器的自适应加权向量。PID控制器神经元j执行CAN初始化的权向量迭代式为:
wj*(t+1)=wj*(t)+α(cj*)[x(t)-wj*(t)]
其中j∈(j*,NEj*(t)),采用PID神经网络判断A/D采样是否完成,根据收到的数值调节输出电压为:
u0=-sgn(Mn)ρ(t)sgn(s)
通过PID变结构控制,激发一个切断电流的电压脉冲信号,进行智能断电控制,然后执行中断初始化,综上所述,本文设计的智能断电控制系统的A/D转换控制的传递函数为:
式中Y(s)——A/D转换控制的输出参数;R(s)——输入控制参数;e-τs——时钟频率补偿向量。
对网络输入新的训练向量模式x(t)=(x0(t),x1(t),…,xk-1(t))T,得到智能断电A/D转换控制的模糊PID神经网络的学习目标函数为:
式中,α>0,β>0,JPθ表示智能断电A/D转换控制的确定上界,输入层至隐含层权值为ωij(i=1,2;j=1,2,3),由此实现智能断电控制和A/D数模转换。
2系统硬件设计和实现
在上述算法描述和总体设计的基础上,进行智能断电控制的A/D转换模块的硬件电路设计。A/D转换模块采用MUX101程控开关控制AD8021,根据技术指标,整个A/D转换模块包括了模拟信号预处理机、功率放大器、滤波器和电源模块的设计,通过A/D转换实现批量数据转换,智能断电控制系统主机箱选用NI公司C尺寸VXI-1200便携式9插槽机箱,智能断电控制系统主机箱选用NI公司C尺寸VXI-1200便携式9插槽机箱,A/D转换器进行智能断电控制系统信号采集,为智能断电控制系统提供双路16位电流输出。A/D转换器的模拟信号预处理机输出信号的范围在±10V之间,运算放大器稳定到1/1 024,由Mux101多路开关控制智能断电控制的A/D转换模块的晶振频率,得到A/D转换器的模拟信号预处理机电路设计如图3所示。

图3 A/D转换器的模拟信号预处理机电路设计
智能断电控制系统中,选用VCA810进行机组的电压控制,设计带通滤波器:
Vgain=10-2(Vc+1)(-2V≤VC≤0)
式中Vc——带宽控制电压;Vgain——效滤除接收信号后的电压放大增益。
选择了MAXIM公司的5阶开关电容设计智能断电控制的A/D转换模块的功率放大器,为了有效地消除智能断电控制的A/D转换过程中的零点偏移,在各级芯片间设置匹配放大滤波器,采用阻抗匹配滤波放大提高智能断电控制的A/D转换信号的传输功率增益,阻抗匹配滤波放大的等效电路如图4所示。
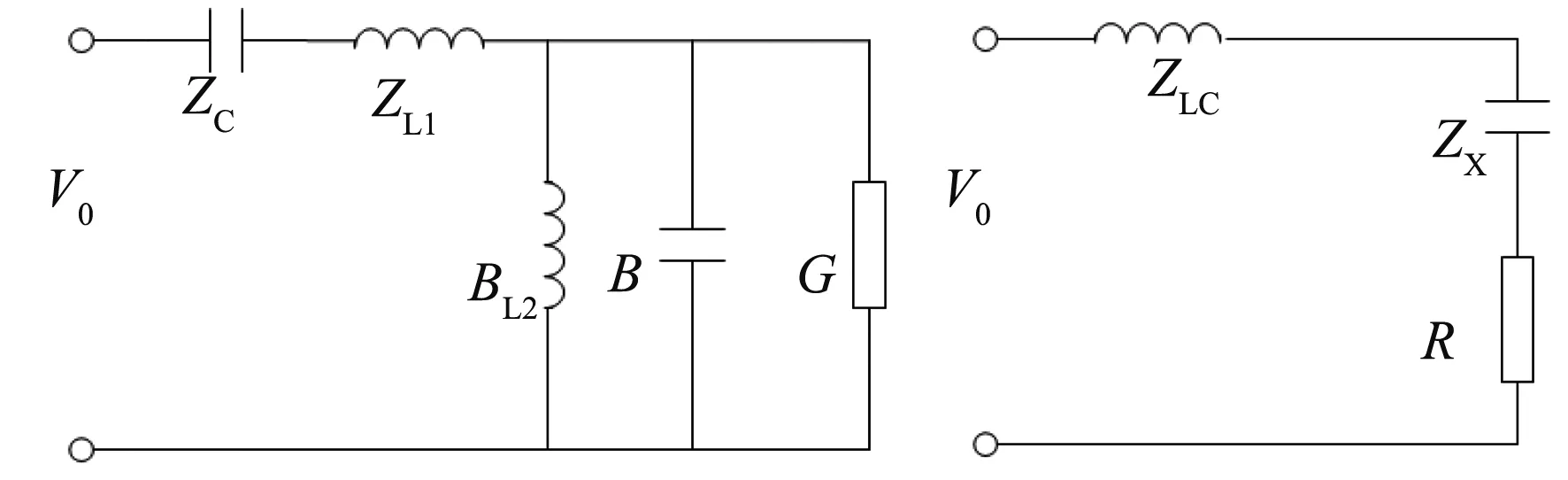
图4 阻抗匹配滤波放大的等效电路

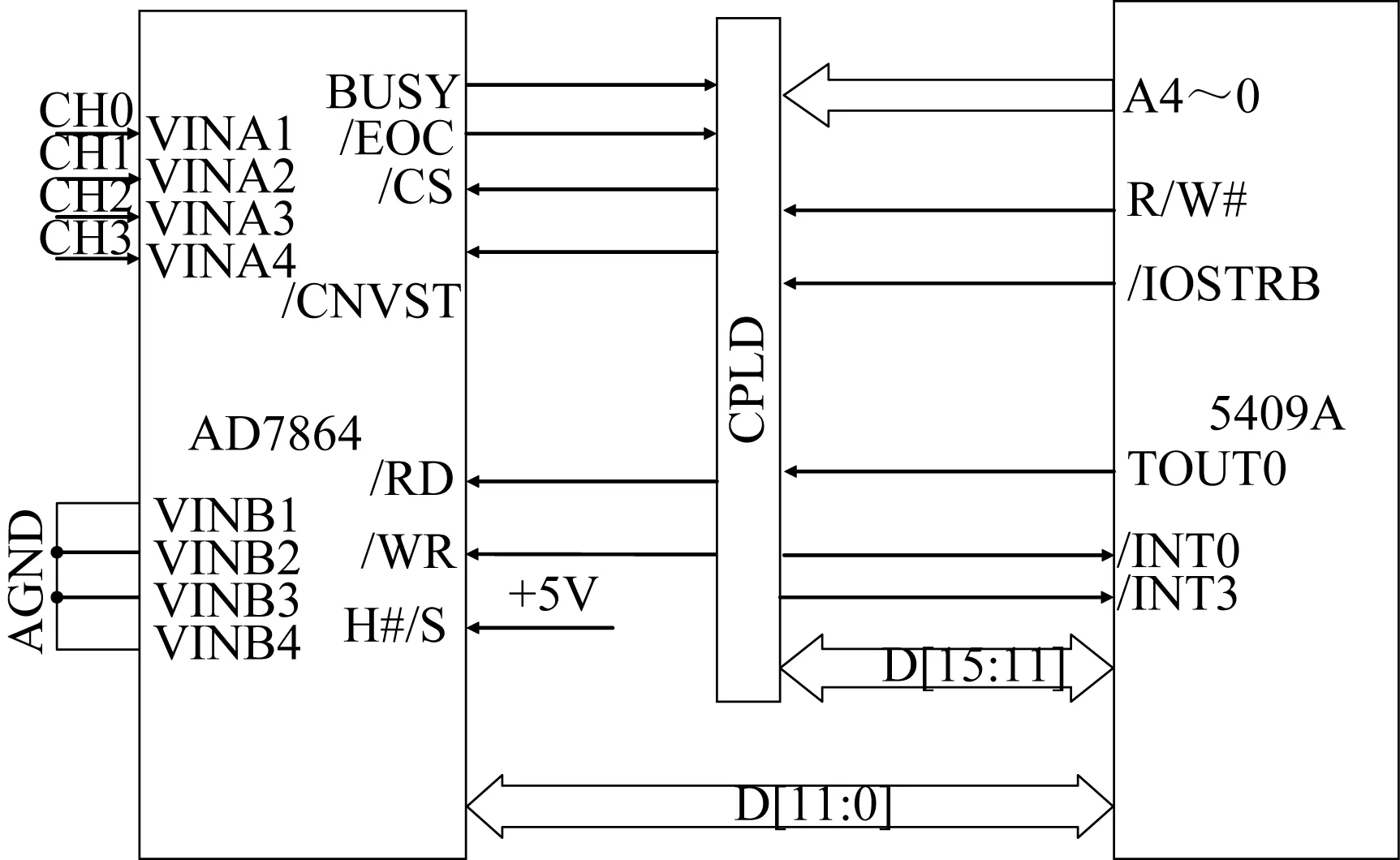
图5 智能断电控制的A/D转换的硬件接口电路
图5中,采用±10V的双极性输入,转换序列完成后把电流和电压等数据寄存在TOUT→/CNVST通道中,用BUSY信号,H#/S接高电平,通过程序加载实现A/D转换。
3系统调试和仿真结果分析
为了测试本文设计的智能断电控制系统A/D转换器的性能,进行系统仿真实验。实验中,AD7864的输出为电源控制的电压脉冲信号,最高位D[11]是符合位,A4~A0的CPLD符号扩展译码为/RST、LDA#和LDB#,2转换电压是单极性的,输出模拟电压为+2.049V,电流最大输出为1A,配置信息采用如下方式进行程序加载:
Biuhgiigs--->
Instay5rhhh--->
[*]Don'tusehth/usrrt
Appletsliergbhghs(assoft-links) --->
智能断电控制系统的S201S处理器有4种电源,每个处理器采用功率放大器进行调制解调,得到智能断电控制系统A/D转换输出的时序图如图6所示。

图6 智能断电控制系统A/D转换输出的时序图
采用本文控制系统,在频率为600,低电平为3.3下,具有较好的智能断电控制的A/D转换性能,以此为基础实现智能断电控制,在脉冲宽度为2时,得到控制信号的A/D采样结果见图7。
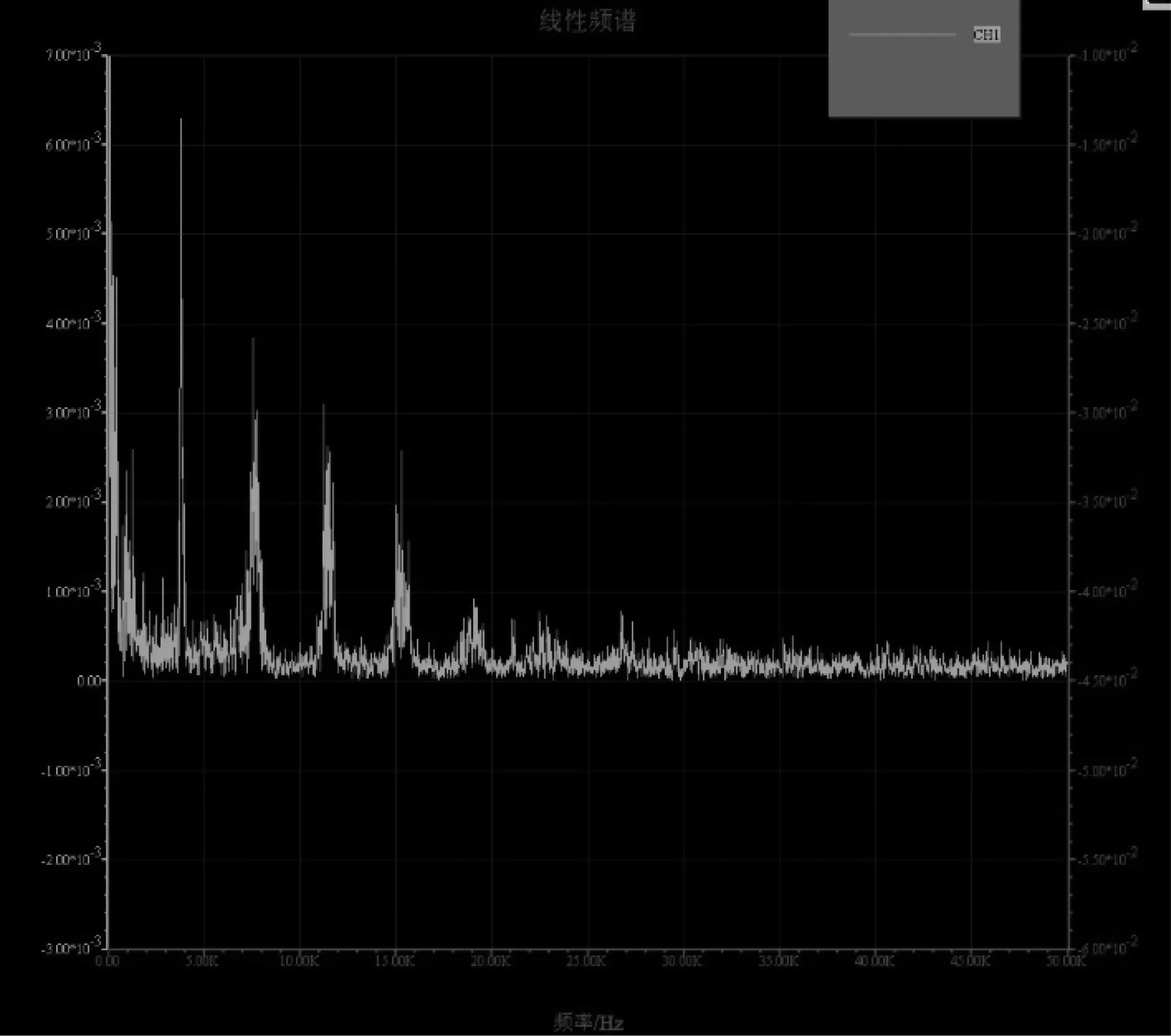
图7 智能断电控制的A/D采样输出
采用本文设计的系统,能有效实现智能断电控制,采样数据连续,CAN卡能回放多帧数据,新性能稳定可靠。
参考文献:
[1]张友安,余名哲,吴华丽. 基于自适应神经网络的分数阶混沌系统滑模同步[J]. 控制与决策, 2015, 30(5): 882-886.
ZHANGYou-an,YUMing-zhe,WUHua-li.Slidingmodesynchronizationoffractional-orderchaoticsystemsbasedonadaptiveneuralnetwork[J].ControlandDecision,2015, 30(5): 882-886.
[2]王斌,翟军勇,雷邦军.STATCOM的内部电流非线性H∞跟踪控制[J]. 控制工程, 2015, 22(1): 45-49.
WANGBin,ZHAIJun-yong,LEIBang-jun.Internalcurrentnon-linearh∞trackingcontrolofSTATCOM[J].ControlEngineeringofChina, 2015,22(1):45-49.
[3]陈达军,于肇贤.计算机仿真在多级放大电路设计中的应用[J].电子设计工程,2015(18):30-33.
CHENDa-jun,YUZhao-xian.Applicationofcomputersimulationinamulti-stageamplifyingcircuitdesign[J].,2015,(18):30-33.
[4]甄建军,张毅.基于螺旋平面线圈的感应电能传输技术研究[J].电气自动化,2014,36(2): 78-80.
A/D Conversion Design for Intelligent Power Control System
LU Xing-hua, HUANG Guan-hua
(Huali College, Guangdong University of Technology, Guangzhou 511325, China)
Abstract:This paper proposes an improved A/D converter module design method for intelligent power failure control system based on impedance matched filtering amplifier. The whole design and modeling of the intelligent power control system is carried out. The ADSP-BF537 parallel peripheral interface of AD9225 is designed, and the SPORT0-TFSDIV register is configured. PID neural network A/D control algorithm is designed. The whole A/D conversion module includes the design of analog signal preprocessor, power amplifier, filter and power module, and realizes batch data conversion and data sampling by A/D conversion.
Key words:intelligent power failure; control system; A/D conversion; PID
DOI:10.11973/dlyny201603003
作者简介:陆兴华(1981),男,硕士,讲师,主要研究方向为计算机控制算法。
中图分类号:TN911
文献标志码:A
文章编号:2095-1256(2016)03-0278-05