基于混合式体系结构的无人船控制系统设计
2016-07-05柳晨光初秀民
谢 朔,柳晨光,初秀民,吴 青,c
(武汉理工大学 a.国家水运安全工程技术研究中心;b.能源与动力工程学院;c.物流工程学院,武汉 430063)
基于混合式体系结构的无人船控制系统设计
谢朔a,b,柳晨光a,b,初秀民a,吴青a,c
(武汉理工大学 a.国家水运安全工程技术研究中心;b.能源与动力工程学院;c.物流工程学院,武汉 430063)
摘要:为了提高无人船在复杂的环境下自主航行与避碰的适应能力,设计了一种兼顾反应式行为和智能决策行为的混合式体系结构控制系统。该系统在普通的三层分层递阶控制系统上加入分析层,该层包括信息分析与行为分析两个模块,两模块采用基于权重的方法将无人船航行事件划分优先级,高优先级事件(避碰)通过反应式行为执行,而低优先级事件(自主航行)通过智能决策行为执行。通过无人船自主航行与避碰实验验证了该系统能在实时避碰的情况下满足自主航行要求。
关键词:无人船;控制系统;混合体系;优先级
为了满足无人船在复杂环境下的自主航行和避碰需求,需要设计实时性、稳定性好的无人船控制系统,国内外诸多学者为此开展了广泛的研究。其中,基于分层递阶控制的结构体系控制系统已成为研究热点[1-3]。作为一种自适应、自组织、自学习的智能控制方法,分层递阶控制已经被应用到一些多任务无人舰船的控制系统中[4-6]。然而,对于在复杂水面环境下实际航行的无人船,需要在自主航行的同时完成实时避碰的紧急任务,普通的分层递阶控制系统对紧急情况难以做出迅速反应,难以满足控制系统需求。因此,如何提高无人船控制系统在复杂环境下的控制实时性和稳定性是一个关键问题。混合式体系结构作为一种兼顾分层递阶控制和紧急反应式控制的体系结构,能够在全局智能分层决策的情况下实现对局部紧急任务的实时处理[7]。该控制体系在自动驾驶车辆[8-9]上得到了广泛应用。借鉴于此,结合驾驶行为的研究方法[10-11],提出一种基于混合式体系结构的无人船控制系统。该系统在分层递阶控制中引入信息分析和执行分析层,形成混合式系结构,以构成感知-行为以及感知-规划-行为两种控制路线,前者执行较高优先级反应式任务(避碰),后者执行较低优先级规划任务(自主航行)。该系统各结构相对独立,采用标准消息协议信息共享与协同合作。
1系统结构以及运行机制
1.1系统结构
提出混合式体系结构见图1,总体上采用4层混合式体系结构,通过在普通的3层分层递阶控制体系中加入分析层来产生介于上层决策与下层执行机构之间的反应式运行通路。其中,各层次之间的信息传递采用信息总线进行共享。

图1 混合式体系控制结构
1) 决策层。主要由环境模型,智能决策和命令生成3个模块构成。在接受由协调层传递的信息之后,从所建立的模型中更新状态信息,然后由智能决策模块对无人船的行为、路径做出评价,生成最优的方案,并由规定格式转化为执行命令。
2) 分析层。分为信息分析与执行分析2个模块。信息分析模块的作用是:对于一般状态下的航行任务,将信息传递到决策层以供较高等级的智能规划决策;对于紧急情况下的任务,直接将用于该任务的航行信息由信息分析模块传递到执行分析模块形成反射行为。执行分析模块的作用是:由信息分析模块直接传递来的信息生成对应的紧急航行任务的命令,然后传递给协调层;而对于协调级传来的一般航行命令,按优先级顺序传递给协调层。
3) 协调层。其主要作用是将执行机构的反馈信息传递给分析层,并分配由分析层传递的决策方案,对应不同的执行机构分解为不同的子任务,同时确定各子任务的执行顺序与执行条件。
4) 执行机构。包含用于执行航行命令的机构(舵、桨)以及部分反馈信息给控制系统的反馈机构,是自动控制模块最底层的部分。
1.2系统运行机制
1.2.1整体运行机制
整体上,该混合式结构体系中的两条系统通路为:①对于紧急事件的处理,感知的信息被发送到上位机中的信息分析模块,进而直接反射到执行分析模块中,信息处理生成指令分配给执行机构;②对于一般航行任务的处理,感知到的信息经过信息分析模块处理成统一的信息格式传递给上位机,经过决策层的程序进行处理后再将生成的操纵指令以统一的格式传递给下位机,最后将指令分配到执行层的各执行机构。
要实现上述对不同航行事件的处理,需要对航行事件划分优先级,使低优先级的事件由通路②进行智能决策处理,而高优先级的紧急事件由通路①进行反应式处理。
1.2.2基于权重的优先级划分方法
仿照神经网路的学习推理机制,采用对事件加以权重的方法进行分类。事件的权重处理过程见图2。

图2 事件权重处理过程
以避碰过程为例解释为:当无人船信息感知模块(雷达以及超声波传感器等)检测到前方障碍物时,由信息分析模块分析出当前障碍物信息以及船自身的航行信息并对每条信息加以权重fi,当满足以下阈值条件时,由信息分析模块直接反射到执行分析模块:
(1)
式中:T(fi)——每条信息传递的阈值。
当信息权重大于该阈值,判定为紧急安全信息,当其到达执行分析模块后,由一系列学习好的反射库进行匹配,迅速作出避让行为决策序列mi,比如转舵、减速等。每个行为均有触发阈值设定T(mi),当子行为满足以下阈值条件时,可以直接进入执行层执行避让行为指令。
(2)
式中:T(m)——设定的总阈值。
由于执行分析模块要同时处理由信息分析模块和决策层传递来的命令。在同一时刻的避让操纵可能会由2个通路同时传递,此时,由直接反射传递来的操纵指令直接影响执行层的执行过程,系统不必等待决策层的规划指令。当直接反射指令处理完毕之后,继续执行决策层的规划指令。具体表现为:无人船对于突现障碍物表现为反射性避让,对于整体的固定障碍物或者障碍群,由决策规划的最优路径进行总体操控。
2系统设计
2.1硬件设计
分为用于实现智能决策与规划的上位机和分配执行任务生成操作指令的下位机以及执行控制命令的执行机构3部分,在功能上分别对应混合体系中的决策层与分析层、协调层及执行层。具体设计如下。
1) 上位机运行控制系统决策层的智能决策程序,无人船自主航行时,岸端的感知设备感知的信息均以无线通信的方式传递给上位机。综合以上要求,选用带有RS232通信接口和4 G网络模块的工控机作为上位机。
2) 下位机实现控制系统中的协调层的功能,介于决策和执行机构之间,需要一定的快速响应能力。使用基于STM32F407系列单片机作为控制芯片的电路板。该电路板采用RS232串口通信总线与上位机进行通信,同时将指令传递给执行机构并接收反馈回来的信息。电路板上各功能模块见图3。

图3 下位机功能模块
3) 控制系统的执行机构包括推进电机、舵机控制系统。同时在执行机构上安装用于检测螺旋桨转速的转速测量传感器和用于检测舵角的角度测量传感器。
2.2程序设计
从系统总体组成可知该控制系统的程序主要包含上位机和下位机的程序。
1) 上位机程序。包括决策层的智能决策程序和分析层的信息分析和执行分析程序。程序流程为信息分析部分程序对外部传感器的信息以及执行机构反馈信息的优先级划分处理,低优先级的信息传递到智能决策程序,该程序将所需要的参数传递到船舶航迹跟踪模型中解算操纵指令并传递给执行分析程序,完成一般航行任务。高优先级的信息则直接传递到执行分析程序,并作出反应式的行为指令。该程序基于VC平台编写,在上位机中运行。
2) 下位机程序。包括2个部分:上位机与下位机之间的信息传递程序和下位机与执行机构之间的信息传递程序。上下位机的信息传递协议有用于识别消息的标识码、数据长度、发送/请求位以及表征信息优先级的信息权重。而下位机与执行机构的信息处理方式为:以脉冲宽度调制实现电机的变压调速以及舵机的控制。以中断方式接收螺旋桨转速与舵角传感器反馈的信息。需要设计的程序主要包括单片机的初始化配置、信息断与处理函数以及PWM波指令的生成等。
3实验验证
为验证所设计的混合式结构无人船控制系统的实时性和鲁棒性,使用模型船实验平台进行验证。该实验平台包括搭载了该控制系统的一艘模型船、用于定位船舶的摄像头和用于远程监控的计算机。其中,实验平台见图4,模型船见图5。

图4 模型船实验平台
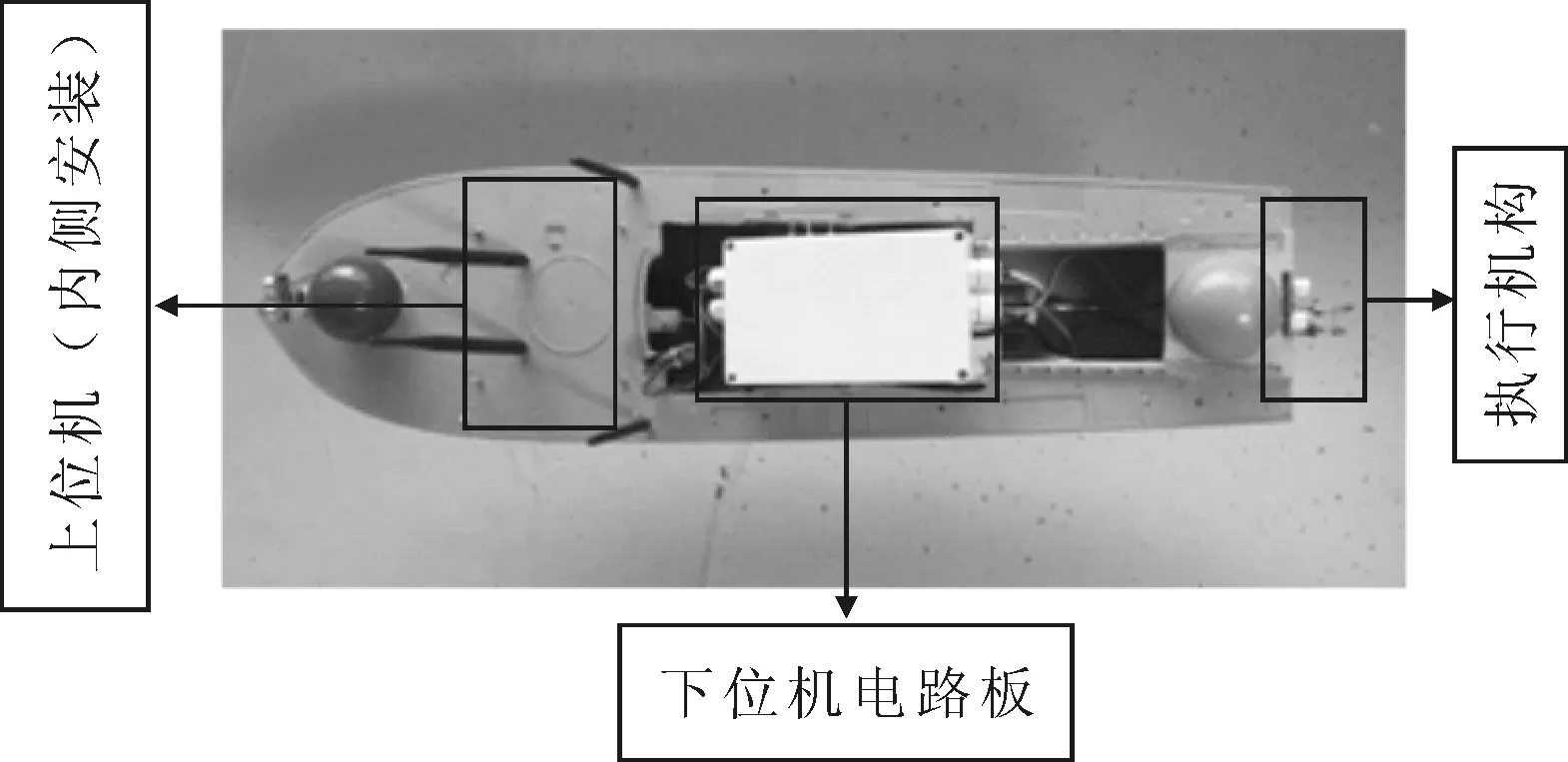
图5 模型船
该模型船为一艘欠驱动鱼雷艇的缩尺模型,船内安装有硬件设计中所述的上位机和下位机,分别用于运行程序设计中所述的上位机程序和下位机程序。船尾安装有控制系统的执行机构用以驱动舵桨来对船舶进行控制。
将无人船的航行任务设计为:一般航行任务为航迹跟踪,紧急航行任务为避碰,航迹为闭合折线段,规定航迹和障碍物位置设定见表1。
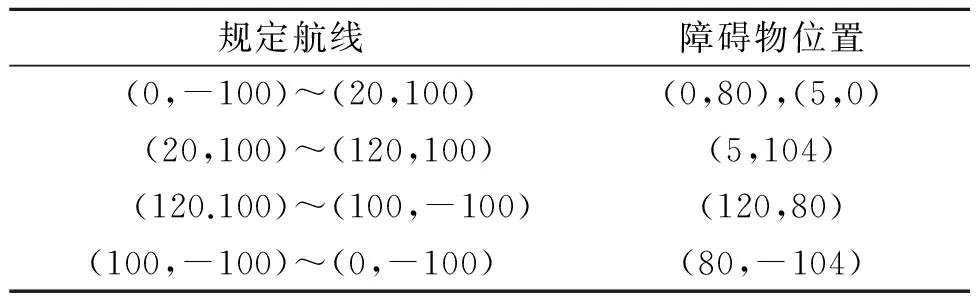
表1 航迹和障碍物位置 dm
无人船跟踪结果见图6。其中虚线为规划航迹,圆圈里的点为障碍物位置,实线为无人船实际航行的路径。

图6 跟踪结果
从跟踪结果可以看出,无人船能按照设定的轨迹航行,在航行过程中成功避开障碍物,并在避让之后迅速回到航线上。实验结果表明该混合式体系控制系统能实现在实时避碰的情况下完成自主航行的目标。
4结论
本文对所设计的混合式结构体系控制系统进行的无人船航行避碰实验,说明了该控制系统对于复杂航行任务具有良好的适应能力,揭示了混合式结构体系对于紧急航行状况的包容性。
相对于目前学者普遍研究的船舶分层递阶控制系统而言,本文所设计的无人船控制系统加入了对船舶航行事件优先级的划分,并尝试在软硬件层构建了控制系统。但该系统存在的问题是:在采取不合适的信息阈值的情况下可能会导致无人船持续陷入反应式任务中,无法回归全局的智能决策任务。在进一步的深入研究中可以考虑采取信息自适应阈值的设定方法来进一步提高控制系统的适应能力。随着水上交通环境的多样化、复杂化,船舶的无人化、自动化已经成为一个趋势。所设计的无人船控制系统可以运用在小型无人测量船、无人巡逻艇等需要实现自主航行任务的船舶上,具有重要研究意义。
参考文献
[1] MCGANN C, PY F, RAJAN K, et al. A deliberative architecture for AUV control[C].Robotics and Automation, 2008. ICRA 2008. IEEE International Conference on. IEEE,2008:1049-1054.
[2] 徐威,刘凯,孙银健,等.开放式模块化的无人平台体系结构[J].计算机应用,2014(S1):301-305.
[3] 丁福光,付明玉.自主式水下潜器分层递阶控制系统[J].船舶工程,1996(2):51-53.
[4] 秦志斌,钱徽,朱淼良.自主移动机器人混合式体系结构的一种Multi-agent实现方法[J].机器人,2006,28(5):478-482.
[5] 吴恭兴,万磊,邹劲,等.混合仿人智能图式的无人艇自主驾控系统设计[J].控制理论与应用,2010,27(12):1647-1654.
[6] TECK T Y, CHITRE M, VADAKKEPAT P. Hierarchical agent-based command and control system for autonomous underwater vehicles[C]∥Autonomous and Intelligent Systems (AIS), 2010 International Conference on. IEEE,2010:1-6.
[7] ORTIZ A, BONNIN-PASCUAL F, GARCIA-FIDALGO E, et al. A control software architecture for autonomous unmanned vehicles inspired in generic components[C]∥Control & Automation (MED), 2011 19th Mediterranean Conference on. IEEE,2011:1217-1222.
[8] 修彩靖,陈慧.基于混合体系结构的无人驾驶车辆系统[J].农业机械学报,2012,43(1):18-2.
[9] 陈无畏,王檀彬,焦俊,等.基于信息融合的多智能体混合体系智能车辆导航[J].农业机械学报,2011,42(6):1-5.
[10] 徐婵娟,石建军,刘金超.驾驶执行过程研究概述[J].交通信息与安全,2015,33(1):16-21.
[11] 石建军,李鹏飞,刘小明,等.道路通行行为研究进展及其展望[J].交通信息与安全,2015,33(2):1-9.
Unmanned Ship Control System Design Based on Hybrid Architecture
XIE Shuoa,b, LIU Chen-guanga,b, CHU Xiu-mina, WU Qinga,c
(a. Engineering Research Center for Transportation Safe;b. School of Energy and Power Engineering;c. School of Logistics Engineering,Wuhan University of Technology, Wuhan 430063, China)
Abstract:In order to improve the unmaned ship's abilities of autonomous navigation and collision avoidance in the complex environment, a control system based on the hybrid architecture which includes both reactive behavior and intelligent decision-making behavior is desgined. The system adds the analysis layer which includes the information analysis and the action analysis into ordinary three-layer hierarchical control system. The analysis layer adopts the weighting method to prioritize the ship sailing events. The high-priority event (collision avoidance) is carried out through reactive behavior, and low priority event (autonomous navigation) is carried out through intelligent decision-making behavior. The unmanned ship autonomous navigation and collision experiment verified that the system can satisfy the requirements of real-time collision avoidance in autonomous navigation.
Key words:unmanned ship; control system; hybrid architecture; priority-based
DOI:10.3963/j.issn.1671-7953.2016.03.009
收稿日期:2015-09-10
基金项目:湖北省自然科学基金(2015CFA111)
第一作者简介:谢朔(1993—),男,硕士生 E-mail:xieshuo@whut.edu.cn
中图分类号:U666.11
文献标志码:A
文章编号:1671-7953(2016)03-0039-04
修回日期:2015-11-29
研究方向:交通运输工程