200 m3级大型抓斗机总体设计
2016-07-05张伟健马晓晶
张伟健,马晓晶
(上海振华重工(集团)股份有限公司,上海 200125)
200 m3级大型抓斗机总体设计
张伟健,马晓晶
(上海振华重工(集团)股份有限公司,上海 200125)
摘要:以满足南海疏浚作业为目标,开发设计满足南海工况的200 m3级大型抓斗机,整理分析并确定南海海域疏浚作业工况(风、浪、挖深等),介绍抓斗机总体设计方案、主要机构设计方案、重要结构计算、电气控制系统方案,以及大型抓斗的主要性能参数。
关键词:大型抓斗机;总体设计;液压主动抓斗
目前,我国能适应南海作业工况的大型抓斗疏浚船很少,并且这些船舶都是按照沿海作业、近海调遣设计的,无法适应南海特殊作业工况。此外由于受到抓斗容积限制,船舶的施工效率也无法满足南海建设的需要。开发大型抓斗式疏浚工程船和抓斗机械,形成自主知识产权,迫在眉睫。目前国内现有疏浚船的抓斗机多为整机进口,自主设计制造方面几乎空白。本文对能适应南海海域开敞水域作业200 m3级大型抓斗机主要执行机构、结构的设计及选型进行介绍,为同型产品设计提供参考。
1概况
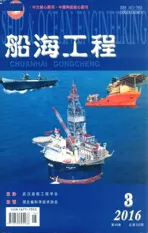
200 m3抓斗机主要由主体结构(包括臂架、人字架、转盘、圆筒体及拉杆)、传动机构(起升、回转机构及钢丝绳缠绕系统)、动力系统(电气、液压系统)、抓斗,以及辅助系统组成,见图1。
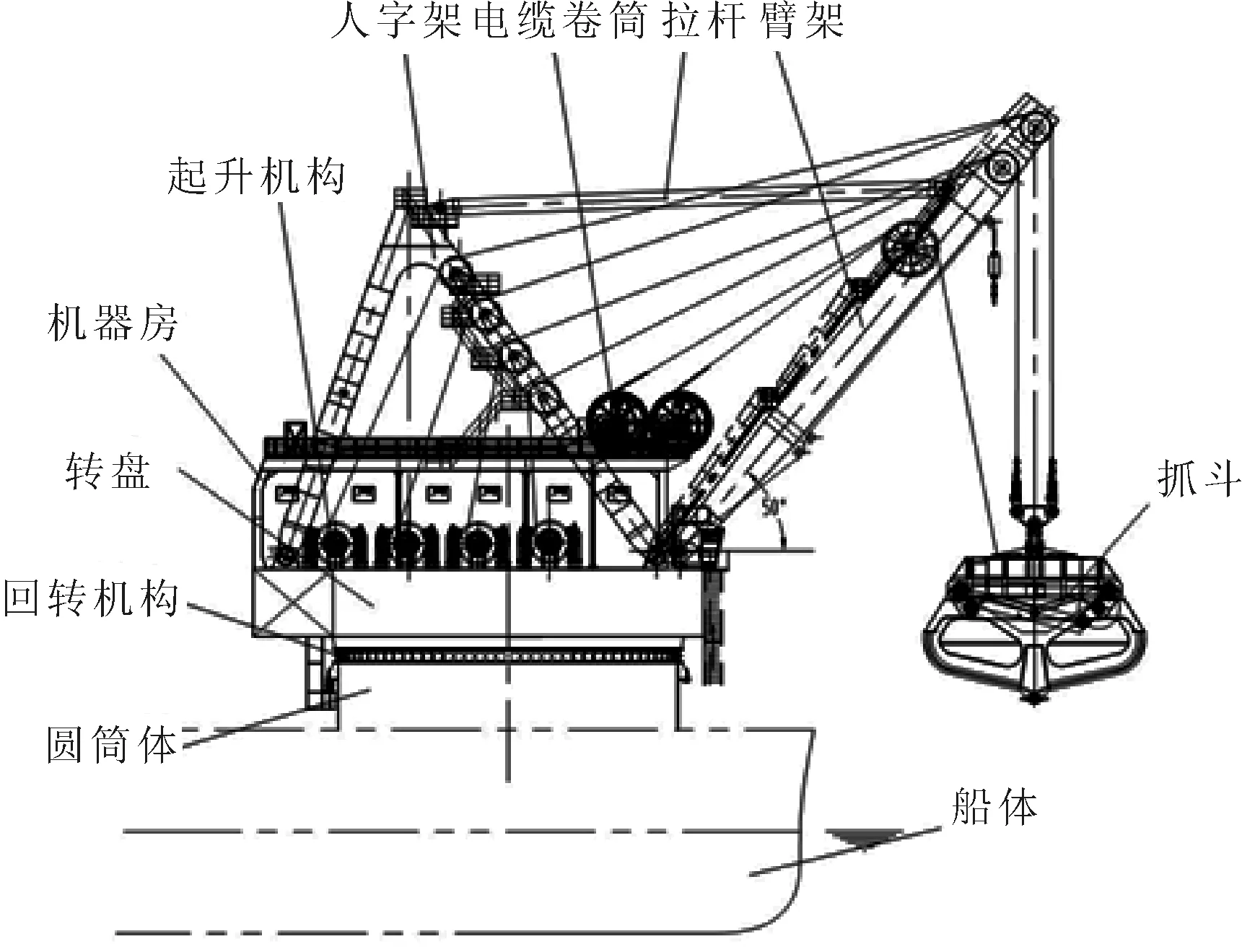
图1 抓斗机示意
抓斗机在设计时要充分考虑环境条件适应性,要能满足南海开阔水域施工的需求,设计参数要符合当地气象环境及地质条件,抓斗机的设计需考虑设备维护方便、快捷及一定的经济性。根据项目设计要求,应能达到以下性能指标。
额定拉力:6 900 kN;
吊臂长度:33 m;
工作半径:31 m;
吊臂作业角度:50°;
抓斗:轻型PLC 200 m3、370 t(自重);
中型PLC 136 m3、400 t(自重);
最大提升高度为10 m(水线以上)。
2抓斗机总体设计
大型抓斗机容量大、需在南海敞开海域进行作业、工况复杂,载荷重、作业频繁、作业环境严酷、对结构冲击非常大、制动器发热高;同时转盘转动惯量大,回转速度快,总体布置空间局促,目前普遍使用的总体方案无法满足设计要求,为此需研究新的功率大、效率高、尺寸小、机构简单且易于实现自动控制的总体方案。
2.1设计参数对气象环境的适应性
根据南海海域历史统计数据及相关资料[1-4],抓斗机工作状态最大风速确定为20 m/s;浪高1.85 m(有义波高)、浪周期7 s。以上可满足南海70%以上的工作窗口期,整机性能配置具有较高的经济性。
综合考虑南海可作业区域水深兼顾沿海普通疏浚作业及设计的经济合理性,本抓斗机工作水深确定如下。
定位桩挖深~30 m(水线下垂直深度);
最大挖深~80 m (水线下垂直深度)。
2.2主要技术参数
抓斗机主要技术参数的确定与额定起重载荷、工作循环过程及产量要求密切相关。根据施工要求,抓斗机需满足以下工作循环过程。
抓斗下放→抓斗到位后的制动→液压抓斗闭合→抓斗提升→抓斗制动→回转至驳船位置→液压抓斗打开卸泥→回转至挖泥位置→抓斗下放,见图2。

图2 抓斗机工作循环示意
抓斗机额定拉力为6 900 kN,额定起升速度为50 m/min,下降速度为66 m/min,回转速度为0.6 m/min。综合考虑载荷的组合情况、起升、回转系统的动力分配方案,经计算抓斗机总装机功率定为9 000 kW。由于搭载抓斗机的船为自航船,且航行与疏浚作业不同时工作,在抓斗机动力方案设计上充分考虑了本船工况及控制特点,提出船、机共用发电机组的设计思路,整机动力由疏浚发电机组提供(航行时,此发电机组给推进系统供电)通过中心集电器滑环传输供电。
2.3总体布置
本机起升重量、高度、回转直径都是目前世界上现有抓斗机中最大的,整机的布置综合考虑主体结构铰点位置、各功能机构排布、机器房布置、钢丝绳走向及配重设置等各方面因素,整机转盘结构分顶层、上层和下层三层排布,见图3。
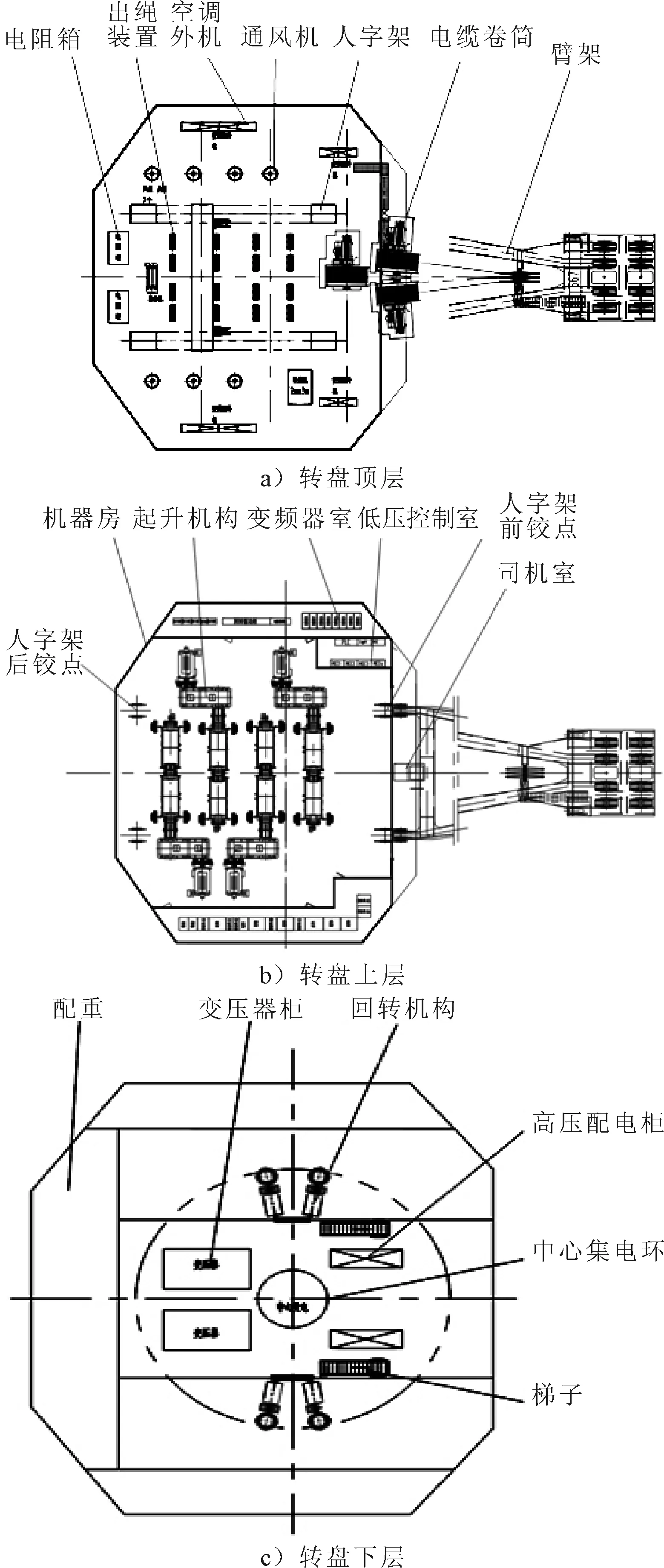
图3 转盘结构
顶层主要安装出绳装置、通风装备,后部安装电气电阻箱柜,前部安装电缆卷筒。上层主要布置起升机构、电气装置及结构件铰点,最前面布置臂架的2个铰点,后布置4套起升机构,低压电气柜布置于转盘的左右两侧。转盘下层中心位置留给中心集电环安装,尾部为配重空间,2个变压器柜及高压配电柜也安装于下层空间。回转机构安装于下层左右两侧的回转半径处,对称布置。整个转盘及机器房布置合理、紧凑[5-7]。
2.4起升机构
本机起升机构(见图4)采用变频控制,整机供电由中心集电环上机,为减小电缆直径及损耗,采用高压电上机(6 kV)。为适应南海工况,保证大挖深要求,起升机构采用卷筒驱动,并采用独创的串联形式,从而达到节约空间的目的,并解决了钢丝绳缠绕偏角过大的问题[8]。
2.5回转机构
抓斗机作业频繁、冲击大,加上海上作业维护困难,本机回转机构采用齿圈驱动形式,齿圈直径约20 m,为普通疏浚抓斗机的2倍。

图4 起升机构
经过反复计算论证及与相关专业配套厂商的多次沟通,提出新型的分段式内齿圈(见图5)设计方案,既解决了无法整体制造的生产瓶颈,又能完全适应抓斗机大冲击载荷的使用工况。更重要的是,每段齿条均可互换,相比传统型式具有维护方便、节约成本的优势。
图5 齿圈分段
2.6缠绕系统
由于作业频繁,抓斗机使用的钢丝绳磨损非常严重,平均3个月就要进行1次更换。本机起重量大,钢丝绳绳数多,缠绕系统复杂,选择绳径60 mm,该绳径为抓斗船上使用的最粗的纲丝绳直径,若超过该尺寸更换钢丝绳异常困难。
根据抓斗机起升总载荷及钢丝绳的安全系数,起升机构采用16个吊点,是普通方量抓斗机(2开闭绳,2支持绳)的4倍。由于吊点较多,抓斗吊点使用多重平衡梁结构,缓解抓斗各钢丝绳间载荷的不平衡受力情况,通过几组平衡梁的均匀,能使每根钢丝绳上的受力均匀,减小冲击,延长钢丝绳的使用寿命及减小载荷对机构及结构的冲击,见图6。

图6 起升钢丝绳缠绕系统
2.7结构布置
考虑到抓斗船的工况(主要用途是南海取料),本抓斗机不布置变幅机构,靠移船来执行相应动作功能,优点是能提高南海作业时的可靠性、安全性;本机结构布置简单、自重轻、整机稳定性高、并对回转部分结构进行了优化。固定式臂架根据工作幅度及受力情况,角度定为50°,以此确定人字架的高度及滑轮布置形式。
结构设计中充分考虑南海作业的特殊性,臂架采用箱形结构,并采用高强度合金钢,减小疲劳点;转盘采用双层结构,二道工字主梁,方便机构及电气布置,采用合理的圆桶体支撑结构。同时结构设计根据CCS规范要求,进行加载,充分考虑海上作业波浪、船倾引起的附加载荷,采用有限元进行分析,优化局部设计,控制应力集中点的发生,使应力值在合理的范围之内[8-9]。抓斗机在带载及放置状态下的最大结构应力云图见图7、8。
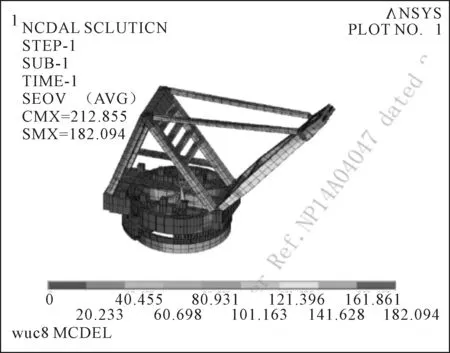
图7 抓斗机带载工况最大结构应力图
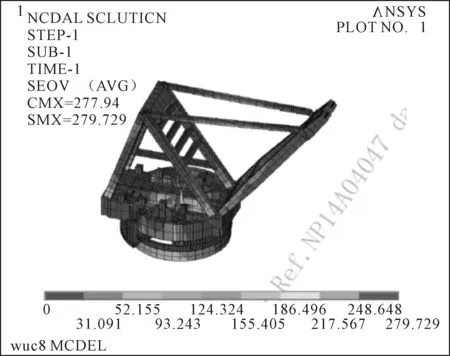
图8 抓斗机放置工况最大结构应力图
2.8电控系统
1) 采用新型变频控制方案,起升机构采用变频控制4个起升电机同步工作;回转机构采用变频控制4个回转电机同步工作来完成抓斗机的作业过程。驱动器采用直接转矩控制DTC技术。逆变器的开关状态由电机的核心变量磁通和转矩直接控制。测量的电机电流和直流电压作为自适应电机模型的输入。电机转矩比较器将转矩实际值与转矩给定调节器的给定值作比较,磁通比较器将磁通实际值与磁通给定调节器的给定值作比较。依靠来自这2个比较器的输出,优化脉冲选择器决定逆变器的最佳开关状态。
2) 制动器采用动态控制,控制PLC获取驱动器制动一刹那时驱动器的输出力矩,并且在下次打开制动器时,将此力矩提前送给驱动器,并检测驱动器已输出此力矩后再打开制动器。制动器在制动时保证速度为0,实现零速制动,再次打开制动器前,PLC将前一次获取的驱动器输出力矩,也就是此时重物的重量,再以预力矩的方式送给驱动器,并且检测此时驱动器确实已经输出了同样大小的力矩后,再打开制动器。在技术指标上,主要采用驱动器波形图的方式,特别是在制动器打开和闭合的瞬间,对机械机构和制动器本身的冲击降为0,并且在制动器打开的瞬间,卷筒0冲击,平稳提升或下放重物,并且同时在控制逻辑中还保证了提升重物的防坠功能,最大程度地保证了提升重物的安全。实现制动系统机械和电气的有机结合,减小制动冲击及运动平稳性,减小制动盘的磨损及发热。
3) 抓斗机的起升机构通过变频器控制电机,通过PLC控制实现平稳启动和停止,由于采用多卷筒多出绳起升机构的设计,为保证起升的同步性,电气系统采用速度跟随的控制方式,通过逻辑控制器进行逻辑对比以驱动电机同步控制,保证了控制的准确和可靠。
2.9液压主动抓斗
目前国内外大部分抓斗机使用的抓斗为机械重力抓斗,斗容在30 m3左右,最大50 m3。但是大斗容机械抓斗缠绕布置困难,钢丝绳数众多会造成闭合力维持和同步控制难以同时保证的情况,无法适应本机200 m3的设计要求[11-12]。
近年来,电动液压抓斗发展十分迅速,在煤炭、砂石、矿石、木材等各使用工况均已有规格齐全、品种繁多,性能良好的产品。在疏浚工程作业方面,具有操作简单、更换方便、挖掘性能好的优势。
为配合本机200 m3大方量、硬质土的要求,设计研发了200 m3轻型及136 m3中型两型电动液压抓斗。主要技术参数见表1。

表1 两型电动液压抓斗主要技术参数
3结论
1) 南海全年风速小于17 m/s的概率为93.97%,大部分区块全年有义波高在1.85 m以下概率达70%以上。作业区域平均水深40~50 m,最大水深80 m。因此抓斗机开敞水域作业设计条件选取最大风速20 m/s、浪高1.85 m、最大挖深80 m可以满足足够的作业有效时间。
2) 本文200 m3抓斗机为国内首个自行研究的大型抓斗机。采用新型的串联卷筒型式的起升机构方案设计,克服了大扭矩、大跨距、多出绳卷筒的设计难题,减小了机构布置空间占用。采用了新型的缠绕系统交错布置型式,有效解决了本机载荷不均、出绳数多、出绳角难保证等技术难题。采用分段式齿圈回转机构设计,有效解决制造难题,提高可靠性和互换性。
3) 结构上采用优化设计,严格按照《船舶与海上设施起重设备规范》,通过有限元进行加载和结构校核计算,计算结果符合规范要求。采用高强度材料,有效减小结构自重。
4) 自主设计研发了大型电液主动抓斗,抓斗通过液压系统自动调节抓取力大小,大大减小抓斗的容重比,提高抓取效率,克服机械重力抓斗滑轮布置难题及斗容无法做大的技术瓶颈,形成自主知识产权。
5) 提出新型抓斗机变频控制方案,为抓斗机驱动技术提供新的技术方案,实现降低成本,增加效率,减小驱动器设备体积,减少排放等目标。
6) 提出了多卷筒起升控制方案,解决了多卷筒起升同步控制难题,为大型抓斗机起升系统控制提供技术支撑。
7) 创新设计了制动系统机械制动+电气制动组合式控制方案,提高施工安全性,解决大功率起升机构制动冷却的难题。
参考文献
[1] 赵焕庭.南沙群岛自然地理[M].北京:北京科学出版社,1996.
[2] 方钟圣.西北太平洋波浪统计集[M].北京:北京国防工业出自动社,1996.
[3] 谢以萱.南沙群岛及其邻近海区地质地球物理及岛礁研究论文集(一)[C].北京:海洋出版社,1991.
[4] 中国科学院南沙综合科学考察队.南沙群岛及其邻近海区综合调查研究报告(一)[R].北京:科学出版社,1989.
[5] 中国船级社.船舶与海上设施起重设备规范[S].北京:人民交通出版社,2007.
[6] 孙枫.港口起重机设计规范[S].北京:人民交通出版社,2007.
[7] 中国国家标准化管理委员会.GB3811—2008.起重机设计规范[S].北京:中国标准出版社,2008.
[8] 张伟健,蔡志硕,魏富龙,等.抓斗式挖泥船及其抓斗机起升机构:ZL 2014 2 0138126.0[P].2014-08-20.
[9] 卢耀祖.机械结构设计[M].上海:同济大学出版社,2004.
On the General Design of 200 m3Large Grab Machine
ZHANG Wei-jian, MA Xiao-jing
(Shanghai Zhenhua Heavy Industries Co. Ltd., Shanghai 200125, China)
Abstract:According to the dredging requirements in the South China Sea, a 200 m3 capacity large grab machine is developed. The dredging working conditions (including wind, wave and dredging depth) of the South China Sea are analyzed. The general design scheme, main mechanisms, important structures' calculation, electrical control system and main performance parameters of the grab for this machine are determined.
Key words:large grab machine; general design; hydraulic grab
DOI:10.3963/j.issn.1671-7953.2016.03.001
收稿日期:2015-10-29
基金项目:工信部高技术船舶科研计划项目[工信部联装(2012)539号]
第一作者简介:张伟健(1968—),男,学士,高级工程师 E-mail:zhangweijian@zpmc.net
中图分类号:U664.4
文献标志码:A
文章编号:1671-7953(2016)03-0001-05
修回日期:2015-11-30
研究方向:挖泥船用疏浚设备