开关磁阻风力发电系统最大功率追踪方法研究
2016-07-02窦宇宇杨明扬赵仁明王青中国矿业大学信电学院江苏徐州221008
窦宇宇,杨明扬,赵仁明,王青(中国矿业大学信电学院,江苏徐州221008)
开关磁阻风力发电系统最大功率追踪方法研究
窦宇宇,杨明扬,赵仁明,王青
(中国矿业大学信电学院,江苏徐州221008)
摘要:以1台三相12/8结构的开关磁阻发电机(SRG)为研究对象,设计了基于dsPIC30f数字信号处理器的控制系统。针对爬山搜索最大功率追踪进行了系统的软件、硬件设计,并在实验样机平台上进行了最大功率追踪实验。实验结果表明设计的控制系统能够有效追踪到给定风速下最大功率点。
关键词:风力发电;开关磁阻发电机;最大功率追踪;功率扰动法;数字信号处理器
SRG作为一种新型的机电能量转换设备,其制造简单、容错能力强、运行可靠性高、成本低、低速运行效率高,经过合理的设计可以省去齿轮箱,实现直接驱动,从而可以降低发电成本,提高发电效率。因此开关磁阻发电机很适合于风力发电的场合。目前,国内外对SRG在风力发电方面的应用开展了一系列的研究[1-6]。
文献[1]研究了SRG的控制变量如开通角、关断角、母线电压、转速等对其输出功率的影响,并提出了实现SRG最大输出功率的控制原则。文献[2]在开关磁阻发电机与整流器中间加入了恒阻抗控制电路,使最大功率的追踪算法更简便。文献[3]采用模糊逻辑控制理论对电压波动进行抑制,减小了输出直流电压的波动,同时提出了一种新型的最大功率控制方案,该方案可以实现搜索最大功率点时的快速性和稳定性。文献[4]提出了基于模糊自整定PI控制的自适应步长功率扰动控制方法,解决了定步长功率扰动控制步长选择困难的问题。文献[5]针对风速突变导致开关磁阻发电系统的输出电压难以快速动态稳定控制的问题,提出了一种PWM斩波控制与角度位置控制相结合的复合控制方法,优化了对输出电压的控制,有效抑制了因风速突变对输出电压的影响。文献[6]研究了基于风速跟踪的开关磁阻风力发电系统最大功率点跟踪二维模糊控制算法,使风力发电机模糊控制器具有良好的鲁棒性,改善了系统跟踪最大功率的快速性和稳定性。
本文以1台三相12/8结构SRG为研究对象,设计了开关磁阻风力发电机控制系统。针对风力发电中应用的爬山搜索法进行了系统的软件、硬件设计,并在样机上进行了最大功率追踪的实验与仿真。仿真与实验结果表明本文设计的控制系统能够有效地追踪到给定风速下的最大功率点。
1 开关磁阻风力发电系统组成
开关磁阻风力发电系统主要由6部分组成:风力机、励磁电源、SRG、功率变换器、控制器及检测装置,如图1所示。

图1 开关磁阻发电系统组成Fig.1 Construction of SRG wind power generator
在该系统中,风力机捕获风能拖动SRG运行在发电状态。功率变换器作为能量转换的通道,在励磁阶段外加的直流电源通过功率变换器为相绕组供电;在发电阶段相绕组通过功率变换器回馈能量;控制器是整个系统的中枢部分,捕获系统运行中的电压、电流信号以及转子位置信号,然后综合处理,控制功率变换器中主开关器件的开通与关断。
SRG相绕组电感与转子位置角的变化规律如图2所示。

图2 相电感变化规律及电流波形图Fig.2 Pattern of phase inductance and phase current waveforms
SRG的相电压、相电流表达式为
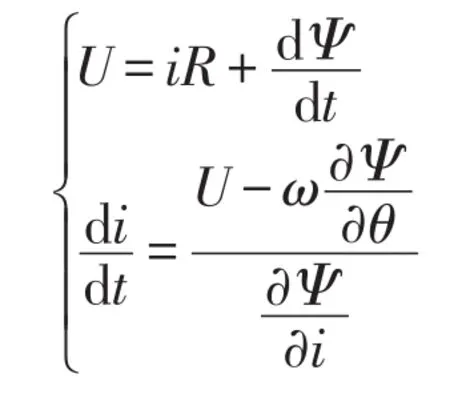
式中:U为母线电压;Ψ为相绕组磁链。U和Ψ满足以下关系:

典型的相电流波形如图2所示,可分为2个阶段:励磁阶段(θ1~θ2)和续流发电阶段(θ2~θ3)。以A相绕组为例,说明其工作过程。如图1所示,在励磁阶段,主开关器件V1,V4导通,直流电压加在A相绕组两端进行励磁,相电流增加,此阶段SRG的励磁功率Pe为

在续流发电阶段,主开关器件V1,V4关断,储存在绕组中磁场能以电流的形式经续流二极管VD1,VD4回馈给电源,此阶段SRG的发电功率Pg为

在1个电周期内,SRG的平均功率Pout为

式中:θ1为开通角;θ2为关断角;k与SRG的相数M和转子极数Nr有关。
电流变化率di / dt满足以下关系:

2 最大功率追踪方案
2.1最大功率追踪原理
根据贝兹理论可知,风力机从风能中捕获的功率为[3]

式中:cp为风能利用系数;A为风力机扫过的面积;ρ为空气密度;ν为风速。
在一定的风速下,风能利用系数cp越大,风力机捕获的能量越多,则风能转换效率越高。而cp与叶尖速λ有关,λ作为风力机的运行参数,用叶片的叶尖圆周速度与风速之比来衡量:λ=ωR/v。
系统转速从风力机的空载转速减小到最大功率点所对应的转速时,功率变化量ΔP与转速变化量Δω的比值K=ΔP/Δω是先增大后减小,在最大功率点处K为0,因此可以利用此特点来改变爬山搜索的转速扰动量。转速扰动量Δn可取为

式中:Δnt+1为t+1时刻的转速扰动量;Δn0为转速扰动量的初始值。
当K<0,施加的转速扰动量Δn<0;当K>0,施加的转速扰动量Δn>0。
系统在追踪最大功率的起始阶段,随着K的增加,系统的转速扰动量增大,这符合系统为实现最大功率追踪的快速性要求,但转速扰动量不能无限增加,应设置在一个合理的范围内。当系统转速接近最大功率所对应的转速时,由于K减小,转速扰动量也减小,这样避免了较大的转速扰动量使系统在最大功率点附近振荡的问题,提高了系统追踪最大功率的稳定性。
爬山搜索最大功率追踪控制系统将转速作为控制量。如图3所示,在恒定风速下,当系统运行在最大功率点的右侧(即K<0),此时给系统施加负的转速扰动量(Δn<0),随着转速的减小,发电功率增加。当系统运行在最大功率点的左侧(即K>0),给系统施加正的转速扰动量(Δn>0),随着转速增加,其发电功率也增加。最大功率追踪程序启动后,系统首先给定一个初始转速扰动量,然后根据发电功率的变化情况给出下一时刻的转速扰动量,直到系统追踪到最大功率点,将此时的转速扰动量置为0。
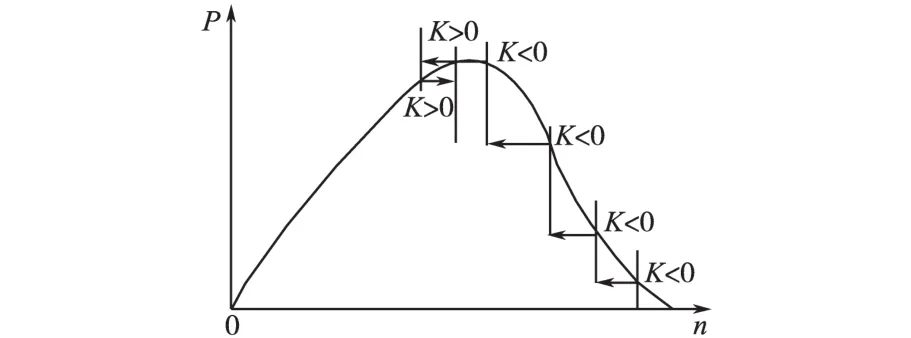
图3 速度扰动示意图Fig.3 Diagram of velocity disturbance
当风速变化时,爬山搜索法追踪最大功率的过程为:若在风速变化前,系统正在搜索最大功率,则当风速发生变化后,系统的转速扰动量不为0,可以继续追踪最大功率。若风速变化前,系统已完成最大功率追踪,以转速n稳定运行于最大功率点处,转速扰动量为0。当风速发生变化后,由于转速控制器的作用,系统的转速依旧保持为n,而风速的变化使系统的发电功率发生了变化,通过比较风速变化前后发电功率的大小,可以判断出风速的变化情况。
2.2最大功率追踪方案
基于爬山搜索最大功率追踪方法的开关磁阻风力发电系统如图4所示。首先使用电压LEM和电流LEM分别将母线电压Udc和SRG的相电流变换成一定范围的电压信号,然后控制器通过模数转换模块采样母线电压和SRG相电流。对于SRG相电流,在主开关器件关断前,此时相电流为励磁电流Ie;主开关器件关断后,这时的相电流为发电电流Ig;然后根据发电功率方程可以计算出SRG的发电功率。当SRG运行时,控制器通过采样转速传感器的输出值,可以得到此时SRG的转速。若当前SRG转速与转速给定的差值在一定的范围内,可认为系统已稳定运行在此转速下,计算出此时的发电功率,然后与上次转速稳定下的发电功率相比较,若发电功率增加,则设置转速扰动量Δn>0。若发电功率减小,则设置转速扰动量Δn<0,并输出转速给定值,通过转速闭环调节SRG的开通角、关断角来控制SRG的相电流,最终改变SRG的发电功率。
需要说明的是,本文侧重于Logistic回归模型的预测,因此将选取2010年前的地震数据共196组作为训练集,而将2010后的三次地震(2010年新西兰Darfield地震、2011年新西兰Christchurch地震以及2011年日本Tohoku地震)数据共57组作为测试集。根据前述Logistic回归方法利用训练集训练Logistic模型,然后将此模型应用于测试集,评估其预测效果。

图4 爬山搜索法运行示意图Fig.4 Operation diagram of power disturbance
3 控制器系统硬件及软件设计
3.1控制器系统硬件设计
控制器系统硬件结构框图如图5所示。该系统采用转速、电流双闭环。微控制器综合处理SRG的转子位置信号、电压电流信号、电流保护信号,输出三相通断信号、互锁信号,并经过光耦隔离输送给驱动电路,产生MOSFET的触发信号。其工作过程为:控制器上电后,光电传感器输出的三相转子位置信号经过CD40106整形和6N137光耦隔离后送到微控制器的捕获引脚ICX,经微控制器处理产生三相通断信号并计算出SRG的转速;同时微控制器采样系统电流信号、母线电压信号计算出发电功率,然后由最大功率追踪程序输出转速给定信号,进行转速、电流双闭环调节,得到角度位置控制信号。三相通断信号、角度位置控制信号和互锁信号经过逻辑处理产生MOSFET的驱动信号。驱动芯片选用IR2110,其内部具有自举浮动电源,能同时驱动两路信号,因此对于三相开关磁阻发电机来说,只需要3块IR2110和1个电源就可以满足驱动要求。

图5 控制系统硬件结构框图Fig.5 Diagram of control system
3.2控制器系统软件设计
开关磁阻风力发电系统以dsPIC30f6010A为控制核心。该微控制器采用精简指令集、哈佛总线结构和流水线取指令方式,除具有普通MCU的控制特点外,其内部还集成有DSP引擎,因此运算速度快,运算能力强。此外其拥有许多电机控制专用模块,包括输入捕捉模块、输出比较模块、PWM模块、AD采样模块和异步串行通信接口等,这极大地方便了对电机的控制。由其构成的控制系统具有低功耗、体积小、高速度、功能强和抗干扰能力强等的优点。
该系统软件的主要功能是完成对SRG的启停控制、位置信号的捕获和电压电流信号的采样,通过转速闭环调节SRG的开通角、关断角来控制SRG的相电流,最终改变SRG的发电功率。在控制系统的软件设计中,捕获模块IC1,IC2,IC3分别捕捉3路转子位置信号P,Q,R。在SRG的初始定位中,已将转子位置信号的上升沿定位在电感最大位置,因此当发生捕获中断时可以判断出此时的转子位置角,然后经过相应角度的延时,在定时器中断中即可完成变角度控制。定时器1、定时器4、定时器5分别对应于A相绕组、B相绕组、C相绕组的角度延时。此外在捕获IC1中断中,利用采样得到的励磁电流、发电电流和母线电压计算出发电功率。在捕获中断IC2中,利用定时器3测量出转子位置方波信号的周期,从而可以计算出此时SRG的转速,然后执行爬山搜索最大功率追踪的程序。定时器2的周期设置为100 μs,在其中断程序中完成电压电流信号、启停信号的采样以及角度位置(APC)控制,这样可以满足对电压电流信号、启停信号的实时更新和对电机的实时控制。系统的主程序流程图和恒风速下MPPT程序流程图如图6所示。

图6 功率扰动法的流程图Fig.6 Program flow of power disturbance
4 仿真与结果
4.1仿真结果与分析
在Matlab/Simulink环境中建立开关磁阻风力发电系统的仿真模型,选择8 m/s和10 m/s 2个风速,进行最大功率追踪仿真。
4.1.1恒风速下最大功率追踪仿真

图7 8 m/s风速时最大功率跟踪仿真波形Fig.7 MPPT simulation waveforms when wind velocity is 8 m/s
SRG的初始转速为1 300 r/min,在2 s时启动最大功率追踪程序,此时随着转速的下降,其发电功率增加,因此转速扰动方向正确,继续施加同方向的转速扰动量,直到仿真进行到9 s左右时,这时发电功率的变化不大且转速扰动量的变化范围小于10 r/min时,将转速扰动量设置为0,系统最终稳定运行在731 r/min,发电功率为132 W。
在风速为10 m/s,直流母线电压为24 V下的最大功率追踪波形如图8所示。SRG的初始转速为1 487 r/min,在2 s时启动最大功率追踪程序,经过8 s,系统稳定运行在824 r/min,发电功率为195 W。

图8 10 m/s风速时最大功率跟踪仿真波形Fig.8 MPPT simulation waveforms when wind velocity is 10 m/s
4.1.2变风速下最大功率追踪仿真
变风速下最大功率跟踪仿真波形如图9所示。
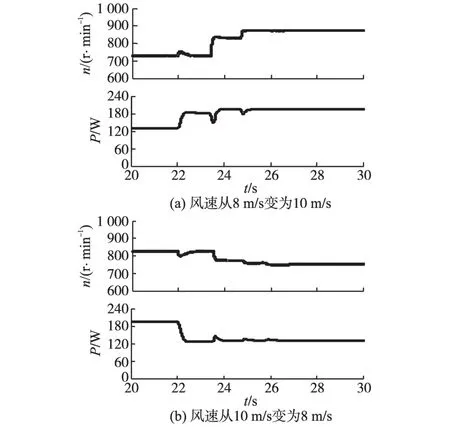
图9 变风速下最大功率跟踪仿真波形Fig.9 MPPT simulation waveforms under changeable wind velocity
首先给定风速为8 m/s,系统进行此风速下的最大功率追踪,在20 s时已追踪到最大功率,然后,在22 s时改变风速为10 m/s,这时,在转速调节器的作用下,系统转速先回到风速变化以前的转速,但是,此时的发电功率发生了变化,利用该特点可以判断出风速变化,然后重置转速扰动量,追踪新风速下的最大功率。风速从10 m/s变化到8 m/s时的情况类似。
4.2实验结果与分析
4.2.1实验装置
如图10所示,左边电机为3 kW的开关磁阻电动机,用来作为原动机,模拟风力机的运行;右边为额定功率为500 W的开关磁阻发电机,2台电机和测试仪通过联轴器连接在一起。
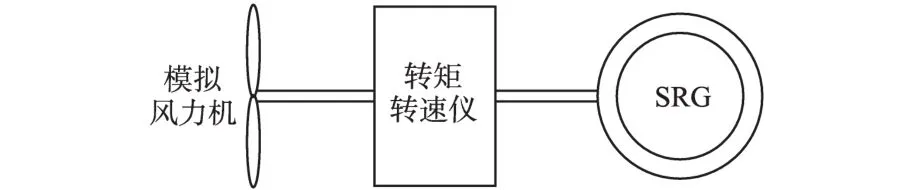
图10 开关磁阻风力发电系统结构框图Fig.10 Structure diagram of wind power generating system using switched reluctance generator
4.2.2恒风速下最大功率追踪实验
图11、图12分别给出了风速在8 m/s和10 m/s,直流母线电压为24 V,SRG系统整个MPPT过程的电压、速度、功率以及稳态时直流母线电压和相电流实验波形。

图11 8 m/s最大功率跟踪实验波形Fig.11 MPPT experimental waveforms when wind velocity is 8 m/s

图12 10 m/s最大功率跟踪实验波形Fig.12 MPPT experimental waveforms when wind velocity is 10 m/s
4.2.3变风速下最大功率追踪实验
图13给出了变风速最大功率跟踪的实验结果。在图13中虚线处风速发生突变。

图13 变风速下最大功率跟踪仿真波形Fig.13 MPPT experimental waveforms under changeable wind velocity
5 结论
该控制系统以1台三相12/8结构SRG为对象进行系统设计,以dsPIC30f系列单片机为控制核心,并在样机上进行了最大功率追踪的实验与仿真。
通过对仿真结果与实验结果的分析,表明本文设计的控制系统能够有效追踪到给定风速下最大功率点,此外该控制系统还具有以下优点。
1)基于爬山搜索最大功率追踪方案无需测量风速,也无需知道风力机的功率特性曲线,因此易于现场应用。
2)控制系统使用变步长爬山搜索法来追踪最大功率,提高了系统追踪过程的快速性与稳定性。
3)爬山搜索法采用了转速反馈,可以有效地解决在风速发生变化时转速不能及时调节所导致系统不稳定的问题。
参考文献
[1]熊立新,高厚磊,徐丙垠.开关磁阻发电机最大输出功率的控制原则[J].电机与控制学报,2009,13(3):250-254.
[2]孙鑫,赵德安,田传帮.开关磁阻风力发电系统最大功率追踪策略研究[J].微特电机,2008,36(10):42-44.
[3]刘香.开关磁阻风力发电功率控制技术研究[D].湘潭:湘潭大学,2011.
[4]林显军.开关磁阻风力发电系统控制方法研究[D].广州:华南理工大学,2012.
[5]曾武,易灵芝,禹云辉,等.开关磁阻风力发电系统输出电压优化控制[J].电力系统及其自动化学报,2013,25(3):61-66.
[6]阮春长,王宏华,阮曰鱼.基于模糊控制的开关磁阻风力发电系统最大功率点跟踪控制[J].电力自动化设备,2012,32(5):129-132.
[7]Chen Hao,Gu J J. Implementation of the Three - phase Switched Reluctance Machine System for Motors and Generator[J]. IEEE/ASME Trans. on Mechatronics,2010,15(3):421-432.
[8]Chen Hao,Zan Xiaoshu,Wang Xing. Excitation for Establishing Voltage of Switched Reluctance Generator at Low Rotor Speed[C]// Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems,2010,6:378-381.
[9]Chen H,Liu C,Xie F,et al. Control System of Switched Reluctance Machines Based on MCF5213[C]// Proceedings of 7th International Power Electronics and Motion Control Conference,2012,6:2552-2556.
[10]Chen H,Liu C,Chen Z. Simulation and Implementation of Wind Turbine Based on Switched Reluctance Motor Drive [C]// Proceedings of the 3rd International Symposium on Power Electronics for Distributed Generation Systems,2012,6:114-118.
修改稿日期:2016-02-29
Study on Control Mode of Maximum Power Point Track for Wind Power Generating System Using Switched Reluctance Generator
DOU Yuyu,YANG Mingyang,ZHAO Renming,WANG Qing
(School of Information and Electrical Engineering,China University of Mining & Technology,Xuzhou 221008,Jiangsu,China)
Abstract:Took a switched reluctance generator with the structure of three-phase 12/8 as study objects and designed a control system based on digital signal controller dsPIC30f. Then software and hardware of system were designed for MPPT,finally the MPPT experiment was conducted on the platform of experimental prototype and the experiment results show that the control system designed can track maximum power effectively.
Key words:wind power;switched reluctance generator(SRG);maximum power point tracking(MPPT);power perturbation method;digtal signal processor(DSP)
中图分类号:TM614
文献标识码:A
基金项目:国家级大学生创新训练项目(201510290021);江苏省研究生培养创新工程项目(KYLX15_1423);中国矿业大学2015年创新创业基金项目大学生创新项目
作者简介:窦宇宇(1991-),男,硕士研究生,Email:yuydou@163.com
收稿日期:2015-09-08
