混合动力客车用大功率无刷直流电机电动及再生制动研究
2016-07-02朱洪雨张东来王子才吕晓明哈尔滨工业大学航天学院黑龙江哈尔滨50080深圳航天科技创新研究院广东深圳58055哈尔滨工业大学深圳研究生院广东深圳58055深圳市航天新源科技有限公司广东深圳58057
朱洪雨,张东来,王子才,吕晓明(.哈尔滨工业大学航天学院,黑龙江哈尔滨50080;2.深圳航天科技创新研究院,广东深圳58055;.哈尔滨工业大学深圳研究生院,广东深圳58055;.深圳市航天新源科技有限公司,广东深圳58057)
混合动力客车用大功率无刷直流电机电动及再生制动研究
朱洪雨1,2,张东来3,王子才1,吕晓明4
(1.哈尔滨工业大学航天学院,黑龙江哈尔滨150080;
2.深圳航天科技创新研究院,广东深圳518055;
3.哈尔滨工业大学深圳研究生院,广东深圳518055;
4.深圳市航天新源科技有限公司,广东深圳518057)
摘要:按照混合动力客车的要求,设计了以DSPIC30F3011作为中央处理器的大功率无刷直流电机驱动系统。该系统设计为转矩控制方式,为混合动力客车提供启动、助力和制动转矩,并且在制动时将能量回馈给超级电容。介绍了该大功率无刷直流电机控制系统的构成特点和设计方法,给出了系统框图,并进行了电动和再生制动原理分析,实验结果表明,该驱动系统可以实现对电动转矩控制并且能够回馈能量至超级电容,可以很好地满足混合动力汽车的驱动要求。
关键词:混合动力客车;无刷直流电动机;能量回馈
汽车数量的进一步增加,给交通的发展带来一系列问题。混合动力电动汽车是目前解决低排放、大幅度地降低污染最有效最现实的一种环保交通工具。混合动力电动汽车同时拥有电机驱动和内燃机驱动,对电机驱动系统不仅要求具有较高的重量比功率,而且既能作电动机运行,还能作发电机运行。
永磁无刷直流电动机的优点是效率高,启动转矩大,过载能力强,高速操作性能好,无电刷,结构简单牢固,免维护或少维护,体积小质量轻,但会产生转矩脉动,电流损耗大,工作噪声大。所以研究高效的大功率无刷直流电机驱动及再生制动对混合动力是很有意义的。
1 驱动系统构成
混合动力车用无刷直流电机驱动系统由超级电容,三相IGBT逆变器,控制电路组成。电动时由超级电容为直流无刷电机提供能量,当刹车时通过该驱动系统回收动能至超级电容。所以此系统需要同时满足电动和再生制动两种工况的需求。该驱动系统的组成原理见图1。
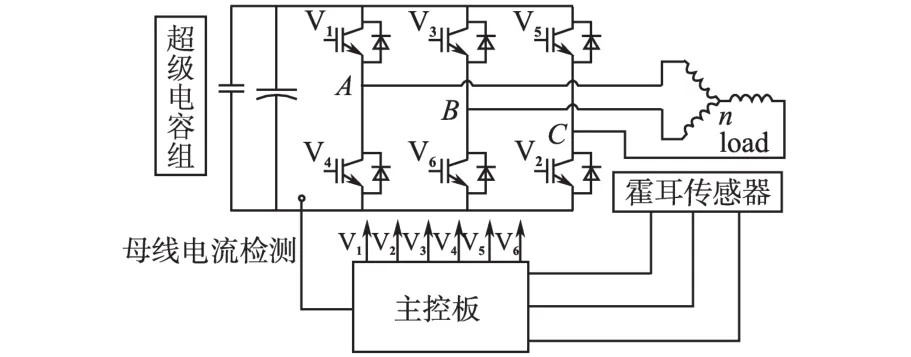
图1 电机驱动系统图Fig.1 The system diagram of motor drive
电机采用的是大功率永磁汽车直流无刷电机,电机额定功率100 kW,额定电压360 V,额定电流277 A,电机极对数2。
2 电动运行及再生制动基本原理
混合动力客车中有3种实际工况,分别是:电动工况,助力工况,再生制动工况。前两者需要电动机工作在电动的状态。再生制动工况将刹车时候动能转换为电能存储在超级电容之内,实现能量的回馈。
2.1电动运行基本原理及实现过程
如图1,电动时采取二二导通方式,二二导通方式是每次使2个开关管同时导通。
忽略导通管管通压降,可以由简化模型推导出电机转矩为

式中:ω为转子机械角速度。
对V1进行PWM控制,就可控制电流的平均值,从而控制平均电磁转矩。电机内置有霍耳位置传感器。可根据霍耳传感器信息进行换相。换相时刻如图2上半部分所示。
对母线电流进行闭环从而控制电机输出转矩,利用PI控制算法,以占空比作为PI控制器输出,实现对母线电流的闭环,系统控制框图见图3。
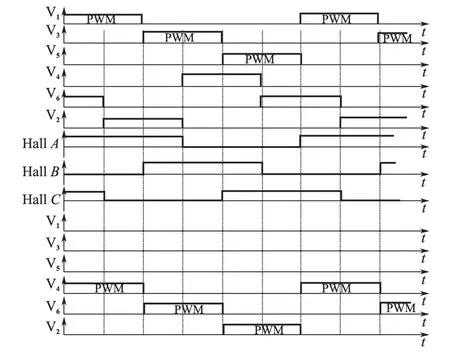
图2 电动和制动状态按霍耳换相顺序Fig.2 Hoare commutation order of motor-driving and braking

图3 电动运行及能量回馈电流闭环控制Fig.3 Diagram of closed-loop controlled system using motor-driving and energy-feedback technology
可以通过上位机给定主控电路转矩信息对电流进行闭环,进而达到转矩闭环控制的目的。
2.2再生制动基本原理及实现过程
在发电状态时,将上半桥的IGBT全关闭,这样,因续流二极管的存在,其等效电路转变为1个半控整流电路,如图4所示。
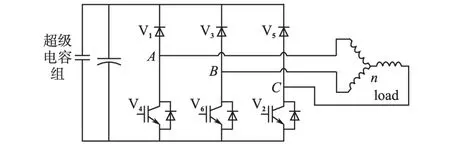
图4 等效发电运行原理图Fig.4 Schematic diagram of equivalent electricity generating circuit
分析电路可见,在再生制动运行过程中,电路相当于Boost拓扑。以A相为例进行说明:上桥臂V1,V3,V5一直处于关断状态,在1个开关周期内,在V4导通时,电机A相反电势为正,B相为负。电流通过V4,V6反并联二极管进行续流,存储能量。在V4关断时,电流流过V1反并联二极管,超级电容组V2反并联二极管。这样计算出输出电压为
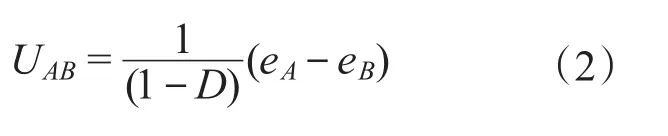
式中:UAB为超级电容充电电压;D为下桥臂占空比;eA,eB为A,B两相反电势。
制动运行开关管换相如图2所示。从式(2)可知,控制D的大小,即可使超级电容两端的电压UAB≥UD,以PI闭环控制的方式自动调整PWM占空比D,满足UAB电压不超过超级电容允许的最高充电电压,并满足发电电流不超过超级电容允许的最大充电电流。控制回馈电流相当于控制电机的制动转矩,并实现恒流对超级电容进行充电。控制结构框图如图3所示。给定电流为负值,代表制动转矩,和电动状态相对应。这样便可以通过给定电流代数值来进行电动和制动。
3 电机启动过程分析
电机在尚未转动过程中速度为0,根据反电势E=CeΦen。所以初始反电势也为0,这时需要电机输入最小电流产生最大转矩。试验证明,电机刚刚起步时刻采到霍耳位置后按照图2进行换相可以保证电机可靠启动,产生最大力矩。另外,电机在刚刚启动的过程中,由于转速较低,反电动势还没有建立,所以加在电机某两相的电压不可太大。
本文利用了一种自升频的软启动算法,所有启动过程通过主控板软件实现。电机启动以后,电机转速较低,根据
式中:E为反电势;CeΦe为常数;D为占空比;UDC为母线电压;Z为电机两相阻抗。
本文在每个换相时刻使占空比上升一个台阶,速度越快,反电势E越大,换相时间越短,占空比单位时间增量越大,这样可以保证电机电流稳步上升。实现了自升频启动的过程,等待电机电流到了某一标定值,将切换到PI算法,对母线电流进行闭环,实现可靠启动。
4 实验结果与分析
在电动运行时,对母线电流进行观测。负载恒定下电流达到稳态时母线电流波形如图5所示。
从图5中可以看出,在对母线电流闭环的电动运行过程中,母线电流基本稳定。软启动达到了很好的效果,电流是逐渐升高的,超调不大,反映了良好的动态特性。在对不同母线电流闭环的情况下实际母线电流值如表1所示。
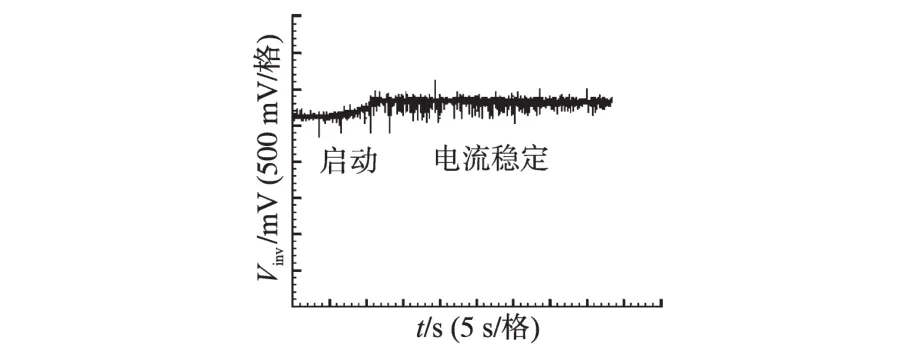
图5 25 A电流闭环母线电流波形Fig.5 Waveform of bus current with 25 A reference bus current closed-loop
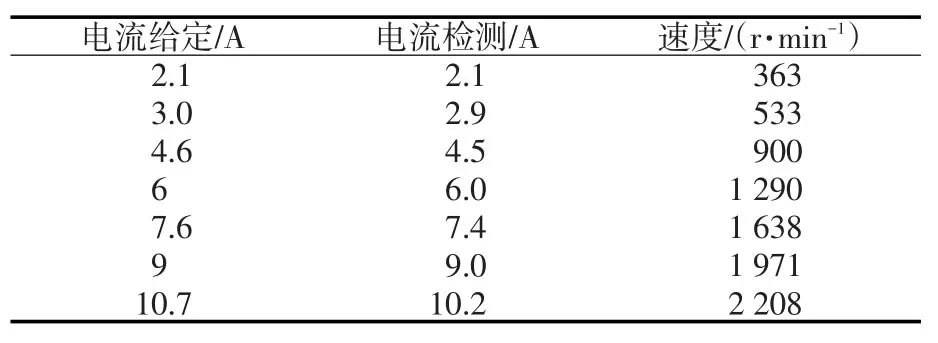
表1 不同母线电流闭环母线电流值Tab.1 Table of closed-loop bus current with different reference
从表1中可以看出,电流闭环达到了很好的稳态精度。电流基本可以跟随给定。可以实现转矩控制。
在制动运行时,对母线电流进行闭环。实现恒转矩制动。利用超级电容作为供电源,当电机运行一段时间超级电容电压会由于输出功率而下降,在达到一定速度以后进行再生制动,这样回馈的能量会为超级电容充电。使超级电容电压升高,电机电动到某一速度值之后自动进行能量回馈,然后对超级电容电压测量。
在Boost占空比限制为90%的情况下,对于不同的回馈电流控制的性能比较如表2所示。

表2 不同回馈电流能量回馈实验数据Tab.2 Experimental data when different feedback current
从表2中可以看出,母线电流越大,反馈给超级电容的能量越多,停车时间越短。
电动时间越长,电机电动结束时刻转速越高,则电动结束时刻超级电容两端电压越低,在电动结束时刻不同超级电容两端电压下能量回馈的实验结果如表3所示。
从表3中可以看出,转速越高,反电势越高,在固定Boost占空比限制下回馈的能量越多。

表3 不同转速下能量回馈效率比较Tab.3 Efficiency comparison with different rotating speed
电机能量回馈主要是通过1个Boost电路把电机反电势泵升超过超级电容电压,实现对超级电容充电。所以放开占空比限制有利于将低速下相对应的低反电势能量回馈给超级电容。在不同Boost占空比下对能量回馈效率所得实验结果如表4所示。
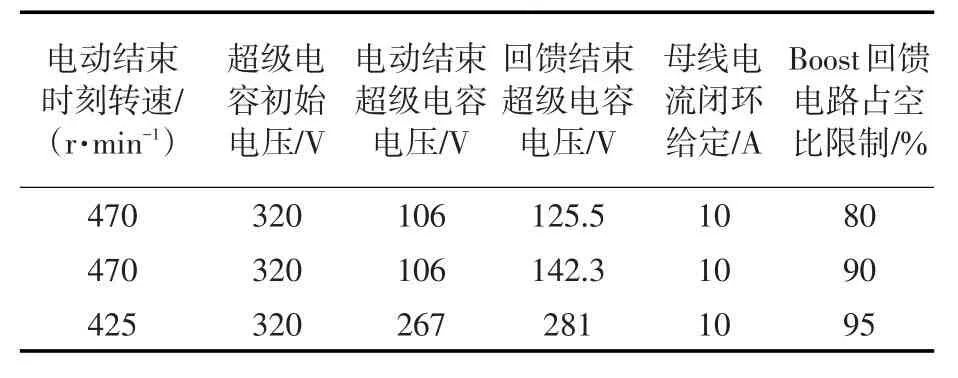
表4 不同Boost占空比下能量回馈实验数据Tab.4 Experimental data comparison when different Boost duty cycle
从表4可以看出,Boost占空比越高,越有利于将低转速下能量回馈给超级电容,效率越高。
在95%Boost占空比的情况下回馈电流10 A的波形如图6所示。
综上,在电动状态下,通过控制母线电流可以达到控制电机电动转矩的目的,在回馈状态下,制动转矩,飞轮转速,Boost占空比限制对电机能量回馈效率有重要影响。

图6 制动电流10 A时母线电流波形Fig.6 Wave form of bus current while brake current equals to 10 A
5 结论
本文设计的混合动力客车用大功率永磁无刷直流汽车电机具有电动和能量回馈(再生制动)复合控制功能,可以可靠地实现电动运行和再生制动运行,适应混合电动客车驱动系统的使用要求。
参考文献
[1]陈清泉,孙逢春.混合电动车辆基础[M].北京:北京理工大学出版社,2001.
[2]Luo Fang Lin,Yeo Hock Guan. Advanced PM Brushless DC Motor Control System for Electric Vehicles[C]// Industry Applications Conference. 2000,2:1336-1343.
[3]黄斐梨,王耀明,姜新建,等.电动汽车永磁无刷直流电机驱动系统低速能量回馈制动的研究[J].电工技术学报,1995(3):28-31.
[4]俞明,罗玉涛,黄榕清.一种混联式电动汽车驱动系统[J].华南理工大学学报,2001,29(8):90-92.
High-power BLDC Drive and Regenerative Braking for HEV
ZHU Hongyu1,2,ZHANG Donglai3,WANG Zicai1,LÜ Xiaoming4
(1. Aerospce college,Harbin Institute of Technology,Harbin 150080,Heilongjiang,China;
2. Shenzhen Academy of Aerospace Technology,Shenzhen 518055,Guangdong,China;
3. Shenzhen Graduate School,Harbin Institute of Technology,Shenzhen 518055,Guangdong,China;
4. Shenzhen Aerospace New Power Technology Co.,Ltd.,Shenzhen 518057,Guangdong,China)
Abstract:According to the demand of hybrid electric vehicle(HEV),a high- power permanent magnetic brushless DC motor drive system based on DSPIC 30F3011 had been developed. To give the HEV any magnitude torque within rated torque for starting aid and braking,the drive system was implemented with direct torque control. To obtain the optimal energy utilization,the drive system controlled the regenerated energy feeding to the super capacitor. The structure peculiarity and design method of this high-power brushless DC motor control system were introduced. The system structure was presented and the principle concerned was analyzed. The experimental results proved that this drive system realizes the direct control of torque and the feedback of energy to super capacitor,and that the drive system satisfies the drive requirement of the HEV bus.
Key words:hybrid electric vehicle;brushless DC motor;energy regeneration
中图分类号:TM33
文献标识码:A
作者简介:朱洪雨(1985-),男,博士,工程师,Email:zhuhongyu505@163.com
收稿日期:2015-09-15
