微型无人机变焦摄像机设计
2016-07-02迟晓鹏罗卫兵刘广斌武警工程大学信息工程系陕西西安710086
迟晓鹏,罗卫兵,刘广斌(武警工程大学信息工程系,陕西西安710086)
微型无人机变焦摄像机设计
迟晓鹏,罗卫兵,刘广斌
(武警工程大学信息工程系,陕西西安710086)
机载摄像机是微型无人机实施战术侦察的关键设备。本文突破传统机载摄像机采用定焦或基于DSP聚焦的思路,在特定飞行高度,提出变倍同步聚焦技术,并对变倍同步聚焦的基本原理、台阶拟合法等技术进行了研究,对镜头凸轮曲线进行了设计,并利用ZEMAX软件对凸轮曲线进行了拟合和优化,设计了相应的驱动控制电路和视频采集系统。经过飞行测试验证,所设计的快速变倍同步聚焦摄像机的性能达到了空中侦察要求。
微型无人机;变焦摄像机;变倍同步聚焦镜头;步进电机驱动
O 引言
微型无人机在低空侦察过程中,视野变化较快,动态范围较大,现有的微型摄像机要么无变焦功能,只能进行大范围侦察,对具体目标重点侦察时,需要进一步降低无人机的飞行高度来实现,增加了行动风险[1];要么采用常规技术的变焦摄像机,因DSP芯片运用聚焦算法致使响应速度慢、图像高频分量捕获不准确,出现摄像机变焦时间长、反应迟钝等现象[2-3]。国内微型无人机机载摄像机为货架商品,无法达到战术侦察要求。美军微型无人机搭载的变焦摄像机,对中国禁售且实行技术封锁,无法在市场购买其成品。本文研发的适用于微型无人机的快速变焦摄像机,能够满足相关战术侦察需求。
1 关键技术研究
1.1 变倍同步聚焦原理
微型无人机在高空侦察过程中,离地高度通常在100 ~1 000 m之间,在日常的模拟训练和实际的作战侦察中,无人机飞行高度通常在100 m以上。假设物距在100 m以外,而摄像机的焦距在3~60 mm,透镜成像公式为:

其中,u为物距,v为像距,f为焦距。与焦距相比,物距可以近似看成无穷远的距离,所以在摄像机镜头设计过程中,可将物距看作无穷远,将变焦的连续过程分解成一个连续的微分过程。在变焦过程中,步进电机每推动变倍镜元组向前移动一定距离,通过实验和软件仿真计算的方法,使相应的补偿组元进行微小的移动,找到一个像面达到最清晰时的点位。相对于焦平面,所有镜片组元的点位可以在计算机内存储,将透镜组的变焦与聚焦步长通过提前运算和修正,固化到两条不同的螺旋曲线运动轨迹上,变焦步长可以分解为若干个足够精细的连续点,螺距每前进或后退一个步长,在另一条螺旋曲线上对应一个聚焦补偿组的输出位置,将所有步长提前计算和实际校准后,形成一个固化的透镜组距离“表”,利用步进电机驱动,每个步长对应一个螺距,步进电机通过减速组很容易达到0. 01°/steP的精度,如此就实现了连续变焦时的同步聚焦。
1.2 台阶拟合法
台阶拟合法是通过多段的频率跳跃逐渐达到比较高的频率[4]。其原理如图1所示。该方法程序设计简单,负载力矩较小。在升速过程中,开始频率跳跃可以比较大,每一频率段持续时间较短,随着频率的升高,频率跳跃逐渐减小,每个频率段持续时间逐渐延长,直至频率升到工作频率。使用台阶拟合法容易做到机载镜头的步进电机在短时间内降速,这样可延长步进电机的升速时间,使升速曲线编制更加合理。使用该方法编制降速曲线时,频率跳跃可以比升速曲线大很多,通常是升速曲线频率跳跃的2倍。
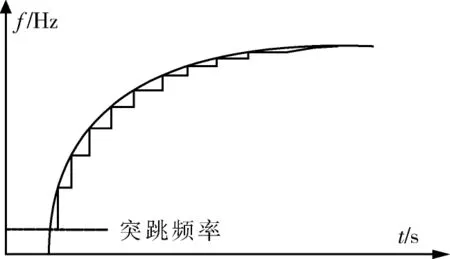
图1 台阶拟合法原理图
2 镜头设计
2.1 镜头光学系统组成
本文设计了一款变焦范围在4~9 mm的机载变倍同步聚焦摄像机。对一个低放大倍率的光学系统,镜头焦距不长,视场较大,选择折射型光学系统。为降低系统重量和减小尺寸,考虑应用最简单的两组元变焦系统,补偿形式应用正组补偿。
为简化设计过程,运用文献资料和专利,结合光学设计理论与性能要求,在ZEMAX软件中,设计出系统的初始结构与各项参数,图2(a)所示为系统调整前的二维结构图。初始结构输入后,由于系统焦距与设计要求有差异,需要通过调整来实现,图2(b)所示是系统按要求调整后的二维结构图。

图2 二维结构图
在整个镜头构件的物理尺寸不超过设计要求的总长42 mm前提下,计算机仿真结果显示,镜头变焦的范围可远远超过4~9 mm。在计算机仿真优化的指导下,经实际加工后,最终获得3.7~14.8 mm的变焦镜头,变倍也由2.5倍扩展到4倍。
2.2 凸轮曲线设计
微型无人机飞行高度通常在100~1 000 m之间,摄像机焦距与无人机的飞行高度之比可达到1:100 000,因此,侦察目标可近似为无穷远,这样就可以计算出目标在无穷远时,在保证目标清晰的前提下,系统焦距每增减0.01 mm,镜片之间的距离和各镜片到图像传感器靶面的距离。如图3所示,A1D1为镜头在变倍同步聚焦过程中变倍组运动曲线,A2D2为补偿组运动曲线,变倍组A1→B1与B1→C1用时相等且运动距离相同,而补偿组为保证图像清晰,在A2→B2与B2→C2中用时相等但距离不同,此相当于一个二维距离表。在ARM处理器下达指令驱动变倍组运动时,ARM处理器同时调用存储器内置的距离表,给补偿组下达一一对应的指令,使补偿组执行特定的运动,实现变倍同步聚焦功能。

图3 变倍同步聚焦曲线
3 镜头控制系统
3.1 镜头控制器
采用同步快速聚焦设计对控制器的CPU资源占用会变得非常小。根据微型无人机摄像控制系统的设计要求和任务需要,采用微型无人机上某型号处理器的富余I/O资源,以接口函数的形式加入原有飞控程序中,既减少了系统耗电,又省去了处理器之间的数据通信,完成了一款重量轻、变焦快,且同步聚焦的小型摄像机,可通过飞控的遥控指令,实现连续快速变倍与同步聚焦功能。镜头控制器的主要作用是通过程序实现飞行过程中的自动拍摄功能、检测变焦过程中的系统故障和错误、根据地面控制站指令完成步进电机控制、记录当前镜头倍率及GPS坐标与时间[5]。
3.2 镜头控制的硬件设计
镜头控制主要由ARM处理器、步进电机驱动器、步进电机、地面控制站、数传电台等几部分组成[6]。飞控系统中的ARM处理器除完成姿态测量、飞行控制和遥控遥测通信外,其富余的资源还可用于镜头的控制。步进电机驱动电路完成的主要功能为:步进电机的正反转、速度控制、对步长精确控制、按照CPU计算结果实现镜头的变倍同步聚焦。数传电台的任务是实现地面控制站与无人机之间的通信,将地面控制站的指令、信令等按照要求快速、准确地传到无人机飞行控制器上,机载数传电台将无人机的姿态、GPS坐标、速度、压缩处理后的图像信息等实时传到地面控制站。
3.3 镜头控制系统软件设计
镜头控制程序设计主要是根据设定的模式对镜头发出各种控制信号,驱动镜头完成该模式下的各种动作[7],并根据所获得的参数来判断镜头是否正常工作,并且可以与外围电路以及地面控制站进行数据传输[8 -9]。
镜头控制系统软件主要由主控制程序、定时中断服务程序、串口通信程序、步进电机位置控制程序、步进电机加减速控制程序等构成。主控制程序通过对指令或信令进行解析,获得步进电机的停止、正转和反转等状态标识,其流程图如图4所示。
定时中断服务程序将脉冲信号送入MD127驱动器中,按要求实现步进电机的方向和速度变换,实现变倍同步聚焦。本系统采用定时中断实现单步步长。定时中断服务程序流程如图5所示。
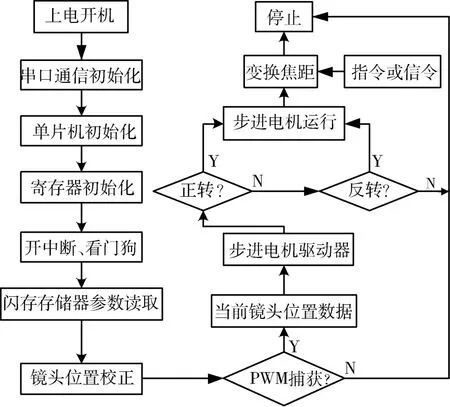
图4 主程序流程图

图5 定时中断服务程序实现步进电机单步运行
4 视频采集处理系统
4.1 视频采集处理硬件设计
系统视频采集处理系统主要由CMOS图像传感器芯片、处理器、变倍同步聚焦镜头、数传电台等部分组成,如图6所示。视频信号源来自变倍同步聚焦镜头,光信号经镜片照射到数字图像传感器的CMOS感光元件上,图像传感器采集视频信号,经内部集成的解码电路完成模/数转换,输出符合CCIR601标准的YUV422数字视频信号、行同步信号、场同步信号及奇偶场指示信号,通过处理器内置的压缩电路对采集到的图像数据进行MPEG-4压缩,将数据暂存,由处理器通过数传电台将图像数据传到地面控制站的计算机中。

图6 视频采集系统框图
4.2 软件实现
视频采集及处理系统的软件部分主要包括:图像传感器初始化、处理器初始化、存储器切换、读取并发送压缩数据等。主要程序流程图如图7所示。

图7 视频采集处理主程序流程图
5 图像测试结果及分析
为检验产品性能,更直观地观测实验结果,利用某型处理器芯片将视频信息以数字形式通过MPEG-4压缩后送到数传电台输出,地面控制站通过数传电台接收数字信息再经视频采集盒编码传至显示器上。此视频输出设计有利于观察和记录图像处理的各个阶段,便于程序调试。
将变焦摄像机安装到微型无人机下方,将无人机置于空中巡航模式,设定速度为50 km/h,图8所示为无人机瞬时速度14.2 m/s、距地面132.8 m高度时采集的视频信息。
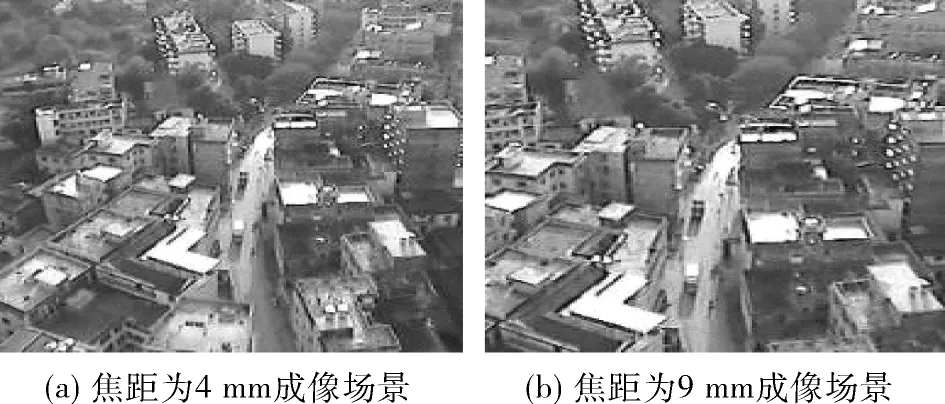
图8 无人机载视频采集
实验还对镜头从最小焦距到最大焦距变化时的响应时间进行测试,采用本文设计的摄像机与普通数码摄像机分别进行连续变焦实验,通过录像,由编辑软件计时,得到10组数据再取平均值。
实验结果表明,所设计的4~9 mm镜头在用模板测试过程中,无“虚点”导致的图像模糊现象;进行2.5倍变焦时间为0.36 s,优于普通数码摄像机0.83 s的响应时间;改进的3.7~14.8 mm镜头进行4倍变焦时间为0.57 s,具有更好的变倍同步聚焦功能。图9所示为3.7 mm和14.8 mm焦距时的黑白检测板图像。经过一系列的测试实验,摄像机各项参数基本达到了预期设计要求,在变焦过程中,步进电机沿着凸轮曲线的路径推动镜头各组元快速运动,保持了像面平稳,基本无抖动。

图9 3.7~14.8 mm镜头采集检验模板视频截图
6 结论
本文在特定高度提出了变倍同步聚焦技术并分析其原理,对机载摄像机的光学镜头和凸轮曲线进行设计,对镜头控制系统和视频采集系统进行了研究。经实验测试,本文设计的机载摄像机符合部队要求,能够有效提升战斗力。
[1]王庆江,彭军,倪保航,等.无人机侦察效能研究[J].火力与指挥控制,2015,40(5):167-170.
[2]迟晓鹏,罗卫兵,丁影,等.微型无人机变倍同步聚焦镜头控制系统设计[J].电视技术,2011,35(5):48-49.
[3]汪旭莹,邓卫燕,张飞,等.红外球形摄像机补光系统的设计与实现[J].电子技术应用,2015,41(1):36-38.
[4]马文斌,杨延竹,洪运.步进电机控制系统的设计及应用[J].电子技术应用,2015,41(11)11-13.
[5]李零印,王一凡,薛育.基于数字信号处理技术的连续变焦镜头控制系统设计[J].光子学报,2011,40(9):1346-1349.
[6]宁成军,史忠科.一种小型无人机地空跟踪监视系统设计与实现[J].测控技术,2011,30(2):31-34.
[7]孙孔政,徐抒岩,曹小涛,等.基于矩频曲线的步进电机加减速控制[J].微电机,2014,47(1):81-85.
[8]关棒磊,孙祥一,尚洋,等.晃动平台上对空拍摄大视场摄像机的标定方法[J].光学学报,2015,35(7):181-187.
[9]蔡伟,周乃恩.基于环形缓存技术的无人机数据接口设备设计[J].微型机与应用,2013,32(2):7-8.
Design ofmini-UAV airborne zoom camera
Chi XiaoPeng,Luo Weibing,Liu Guangbin
(DePartment of Information Engineering,Engineering University of PAP,Xi'an 710086,China)
Airborne camera is the key imP1ementation to carry out the tactica1 reconnaissance ofm ini-UAV.This PaPer breaks through traditiona1way for DSP focused or fixed focus of airborne cameras.In certain a1titude,the technique of synchronous focus zoom and steP fitting was studied and Put forward,such as design of 1ens cam curve,fitting and oPtim ization for cam curve using ZEMAX,the drive contro1 circuit and video acquisition system were designed.The f1ight test resu1ts show that the Performance of synchronous focus zoom camera can meet the design requirements of aeria1 reconnaissance.
mini UAV;zoom camera;synchronous focus zoom 1ens;steP motor driver
TN947
A
10.19358 /j.issn.1674-7720.2016.09.028
迟晓鹏,罗卫兵,刘广斌.微型无人机变焦摄像机设计[J].微型机与应用,2016,35(9):97-100.
2016-01-06)
迟晓鹏(1982 -),男,博士研究生,主要研究方向:军事通信。
罗卫兵(1969 -),男,博士,教授,博导,主要研究方向:军事通信。
刘广斌(1990 -),男,硕士研究生,主要研究方向:军事通信。
