驾驶员诱发振荡飞行培训和评定方法研究
2016-07-01杨挺健
杨挺健
(中国飞行试验研究院 科技部, 陕西 西安 710089)
驾驶员诱发振荡飞行培训和评定方法研究
杨挺健
(中国飞行试验研究院 科技部, 陕西 西安 710089)
摘要:总结了驾驶员诱发振荡(PIO)飞行培训和PIO等级评定(PIOR)方法。根据PIO发生的机理,分析了诱发PIO的因素。在某变稳飞机中,设置可能产生PIO的关键系统参数,设计了高增益的飞行培训任务,由3名飞行员完成任务后利用PIOR定量评估飞机的PIO趋势,研究了PIO飞行培训方法和等级评定方法。结果表明,用变稳机进行飞行员PIO飞行培训的方法合理可行,用PIOR可有效评定发生PIO的趋势等级。
关键词:驾驶员诱发振荡; 飞行培训; PIO等级评定
0引言
对于PIO的定义,航空界有很多说法。美军标MIL-STD-1797A中定义PIO为:由于驾驶员试图控制飞机而引起的持久的或不可控制的振荡。 PIO是一种典型的驾驶员-飞机耦合振荡现象,如果进一步发展或处理不当,会带来严重的飞行安全问题。
在发现PIO现象的初级阶段,人们认为飞机的振荡主要是由飞行员诱发产生的,将发生问题的主因归结于飞行员;随着研究的深入,发现不应将引起振荡及其后果的原因或多或少地经常归罪于飞行员,它是由飞机、飞行员、外界条件等组成复杂系统的因素间的相互影响所致。为此,学者A Harran等提议用“飞机-驾驶员耦合(Aircraft Pilot Coupling,APC)”来取代通常所用的定义“驾驶员诱发振荡(PIO)”。评定PIO的准则较多,典型的有1797规范中的R Smith准则,此外还有带宽准则(又称霍恩准则)、Gibson平均相位速率准则、等效准则等[1]。除此之外,PIOR是定量评定PIO趋势等级的基本方法之一。
本文首先分析了发生PIO趋势的机理和条件,据此有针对性地在变稳飞机中设置可能产生PIO的飞机系统参数和飞行任务,通过试飞研究了PIO飞行培训方法和飞行中利用PIOR评定PIO趋势等级的方法。
1发生PIO的机理分析
1.1闭环耦合
根据过去数十年发生的PIO问题的数据分析可知,发生PIO的主要诱发因素来自于3个方面:飞机系统因素、飞行员因素和外部诱发因素[2]。3个方面因素耦合的基本结构如图1所示。该图表明了飞行员、飞机系统、任务和外部因素的闭环关系,当其形成一个紧耦合闭环(见图2)时会相互影响并可能引发PIO。
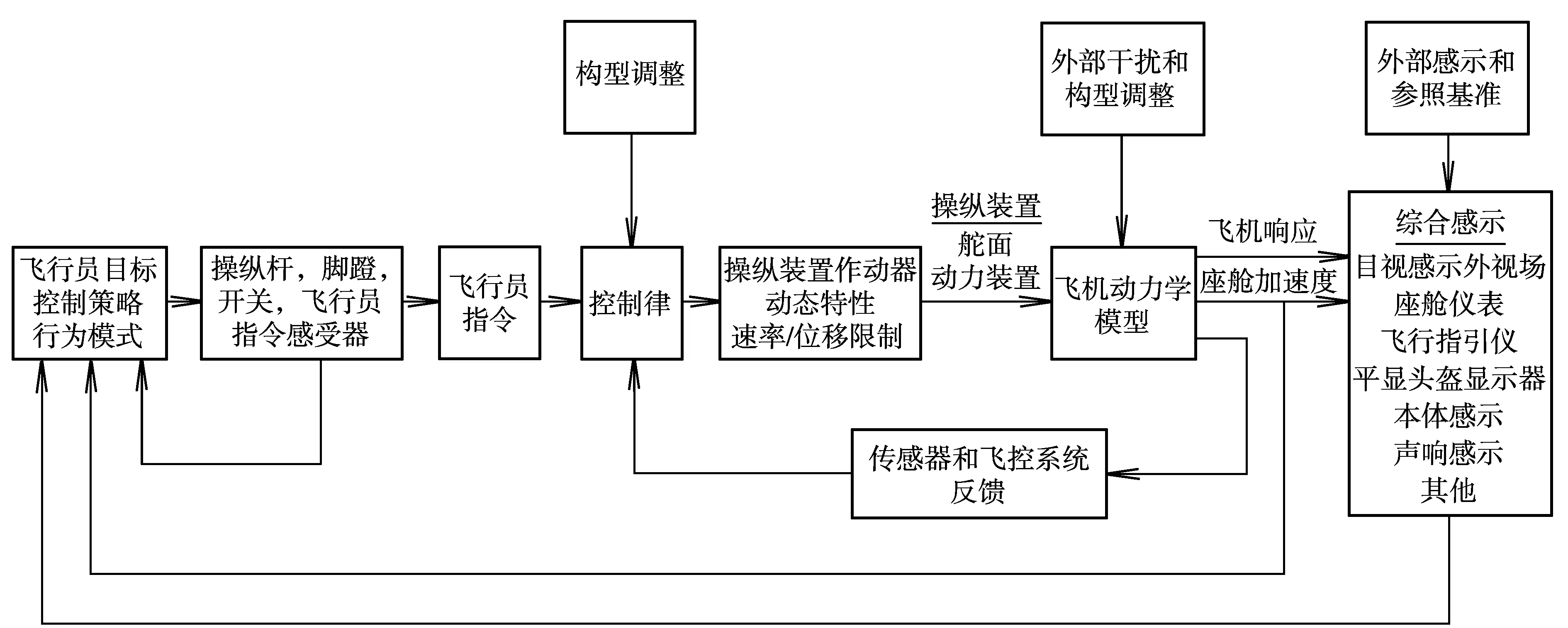
图1 人-机闭环系统Fig.1 Pilot and aircraft closed loop system

图2 人-机闭环系统简化图Fig.2 The simplified diagram of pilot and aircraft closed loop system
在执行飞行任务中,许多飞行任务是可以通过开环输入和熟练的离散指令来完成的,但类似编队飞行这样的任务需要飞行员持续地、全神贯注地高增益闭环操纵才能完成。
在图2所示的闭环系统中,结合具体的飞行操纵和人的特性,根据McRuer等的研究结果,对单自由度补偿任务的飞行员准线性模型可用下式表示[3]:
(1)
式中:Kp为飞行员模型增益,是实现最优操纵需要调整的参数之一,一般为1~100;TL为飞行员对操纵过程的预测需要的超前补偿时间常数,一般为0.0~1.0 s,其值反映了飞行员精神负荷的大小;TI为中枢信息的传递和加工过程时滞时间,一般为0.0~1.0 s(可变),其值反映了飞行员体力负荷的大小;τp为飞行员体内的净传递时间延迟,其值与神经传导和刺激有关,一般为0.06~0.50 s。
考虑到闭环系统的任务特点,图2中飞机系统的数学模型一般采用短周期数学模型[3]:
(2)

飞机特性不佳是发生PIO的主要因素,有专家曾对30多种类型的飞机发生PIO的原因进行分析后得出,造成飞机特性不佳的主要因素有:舵面速率饱和、系统时间延迟、驾驶杆力特性不佳(操纵灵敏度高)、非线性特征(瞬态转换特性)、飞机稳定性差等[4]。
1.2外部诱发因素
PIO发生过程中一个重要的刺激因素是诱发机制,最典型的是快速改变飞机状态,突风被认为是诱发因素之一。风切变、着陆拉平和纠偏着陆成为飞行员试图在特定的目标区域着陆时发生PIO的诱发因素。外部诱发因素不是PIO的起因,对于一架有可接受飞行品质的飞机来说,外部诱发因素只不过是迫使飞行员进入PIO的特有操纵行为[5]。
需要特别强调的是:正如前面提到的一样,构成PIO现象的要素包括:飞机、飞行员和外部诱发因素,因此尽管采用相同的飞机和任务进行训练,但由于飞行员在操纵习惯和增益上的差异,可能会导致他们获得的感受是各异的,有时甚至大相径庭。比如,同样的设置和任务,有些飞行员诱发了严重的PIO,而另外一些飞行员却甚至观察不到任何的PIO趋势,这主要是由于个体差异造成的,因为产生PIO在操纵输入方面有着许多典型的特征,例如:飞行员是否在高增益的无意识操纵、操纵的频率和幅值的范围、感受任务并施加增益的高低等多种因素。
2飞行任务设计
2.1用于识别PIO趋势的飞行任务
为降低飞机产生PIO趋势的可能性,在飞机设计阶段、地面模拟飞行验证阶段,都应主动研究飞机和飞行员的耦合状态,通过增大飞行员的增益和工作负荷,尤其是产生一种极端紧急的感觉,来增加发现潜在的PIO趋势的可能性。具有飞行员高增益(Kp)或任务紧迫性的典型跟踪任务中更可能产生PIO趋势,表1基本涵盖了需要飞行员高增益的飞行任务[6]。
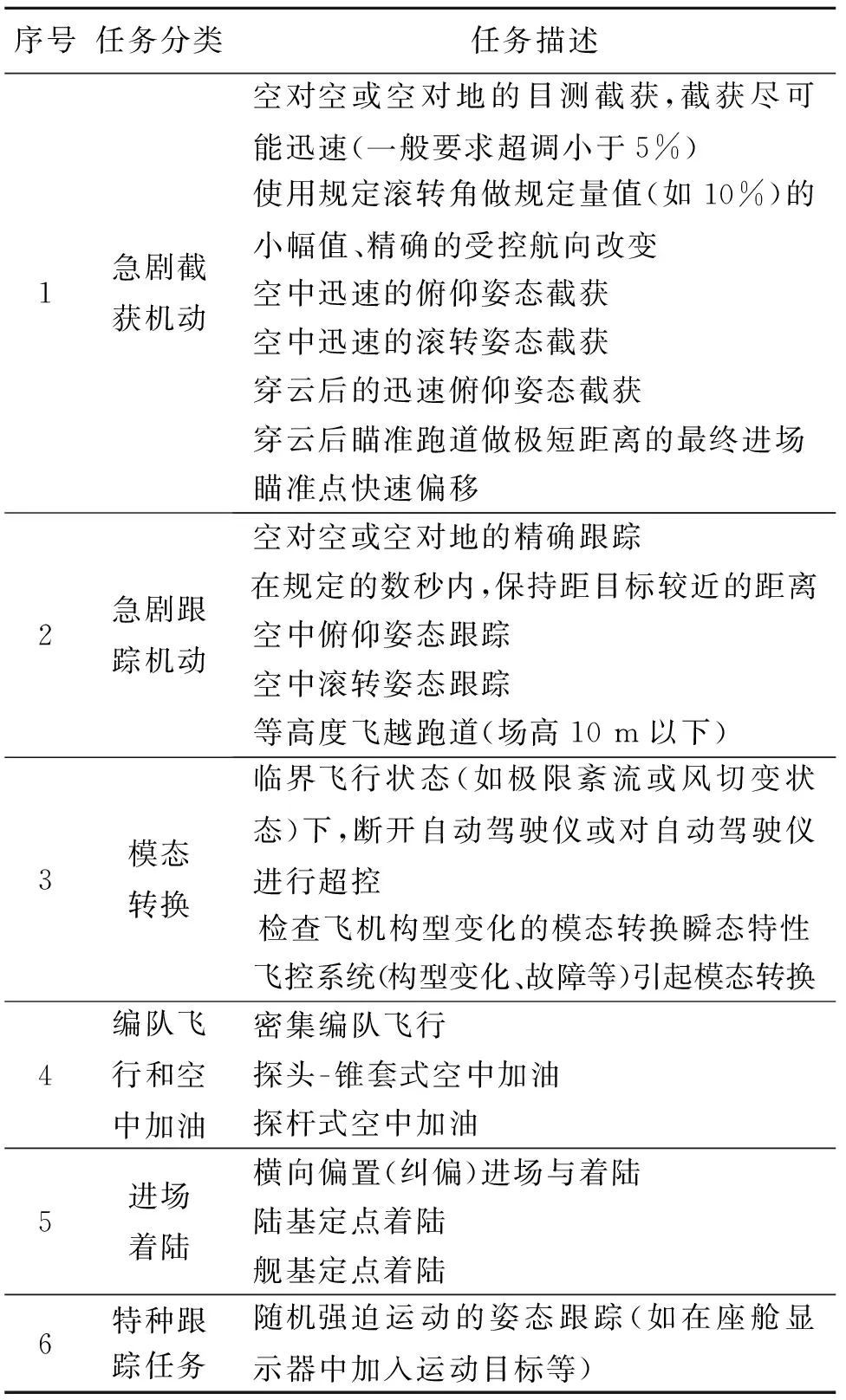
表1 飞行员高增益飞行任务
2.2PIO飞行培训任务设计
PIO飞行培训在某变稳飞机上进行,教员可设置偏离原飞机系统特征的参数;培训任务由3名有良好飞行经验的飞行员完成;为保证飞行安全,所有的飞行任务都是在并座的带飞教员指导下进行的,飞行前飞行员和教员协同了出现PIO趋势后的应急处置方法,紧急情况下由教员操作。
设计了6组高增益的闭环飞行任务,目的是让飞行员在空中尽可能诱发出PIO,并体验和分析PIO现象,掌握发生PIO后的处置方法。
(1)设置系统时间延迟的俯仰角截获
变稳系统参数设置:在俯仰和滚转通道同时设置偏离原系统200 ms的时间延迟。
飞行任务要求:在气压高度为4 500 m、起始表速为460 km/h时配平飞机,交替截获10°和5°俯仰角。先做一次普通截获,然后再做急剧的截获,目的是为了逐步提高飞行员的增益。
(2)设置系统时间延迟的滚转角截获
变稳系统参数设置:在俯仰和滚转通道同时设置偏离原系统200 ms的时间延迟。
飞行任务要求:在气压高度为4 500 m、起始表速为460 km/h时配平飞机,首先在一侧建立30o滚转角,然后向另一侧压杆截获同值滚转角。与俯仰姿态截获一样,先做一次平稳的截获,再做一次急剧的截获。
(3)纵向杆力轻、横向杆力重的目标点截获
变稳系统参数设置:纵向杆力比原系统小7 N,横向杆力比原系统大5 N。
飞行任务要求:在气压高度为4 500 m、起始表速为460 km/h时配平飞机,在空中或地面目视选取目标(云、小镇、跑道、湖泊等),调整姿态转向目标点,先做一次平稳的截获,再做一次急剧的截获。
(4)纵向杆力重、横向杆力轻的目标点截获
变稳系统参数设置:俯仰操纵力比原系统大7 N,滚转操纵力比原系统小5 N。
飞行任务要求:在气压高度为4 500 m、起始表速为460 km/h时配平飞机,在空中或地面目视选取目标(云、小镇、跑道、湖泊等),调整姿态转向目标点,先做一次平稳的截获,再做一次急剧的截获。
(5)副翼速率限制的滚转角截获
变稳系统参数设置:限制飞机的最大滚转速率为20 (°)/s。
飞行任务要求:在气压高度为4 500 m、起始表速为460 km/h时配平飞机,向一侧压杆截获30°滚转角。先做一次平稳的截获,再做一次急剧的截获。
(6)纠偏着陆飞行
图3为纠偏着陆飞行示意图。变稳系统参数设置:设置偏离原系统200 ms的时间延迟。
飞行任务要求:在进入三边前(图3中A点)飞机的构型设置为襟翼20°,起落架放下。三边及三转弯速度为270 km/h,四转弯处在跑道任意一侧设置偏差,距跑道中线的偏置距离约为120 m,五边速度为240 km/h时(图3中B点)开始修正,要求飞行员尽可能地使飞机降落在跑道上要求的标识区域(50 m长、10 m宽)中心。
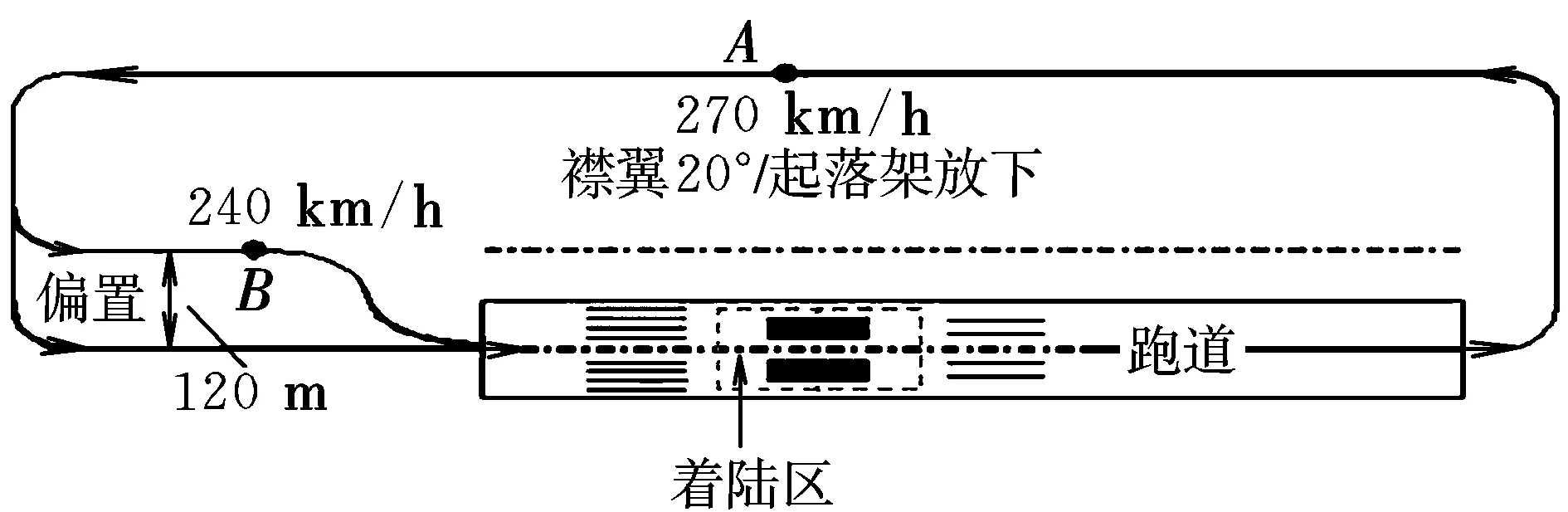
图3 纠偏着陆飞行示意图Fig.3 Schematic diagram for offset-correction landing
为了飞行安全和对比体验,飞行采用循序渐进的方式进行,第一次着陆是在正常飞机状态下进行的正常着陆,目的是熟悉着陆条件和要求;第二次是在正常飞机状态下的纠偏着陆,目的是掌握纠偏着陆的修正方法;最后进行设置时间延迟的纠偏着陆,以体验可能发生的PIO趋势。
3等级评定方法及结果分析
3.1等级评定方法程序
PIOR是用来评估PIO趋势的一种评定方法,利用飞行员问答式判断法,根据清晰逻辑结构的评分程序[7](见图4),最终给出1~6分的PIO等级
分值。
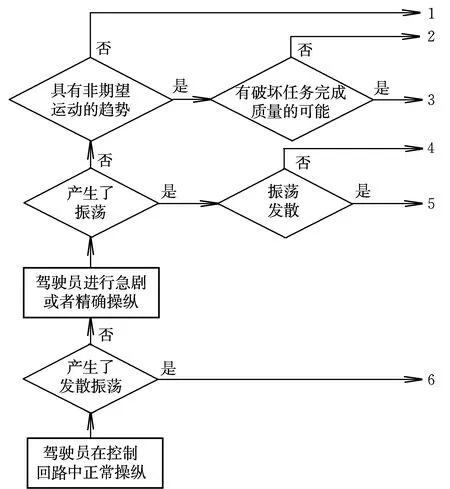
图4 PIOR评定流程Fig.4 PIOR assessment process
3.2飞行结果分析
完成飞行任务后按图4进行PIOR等级评定,评定结果如表2所示。
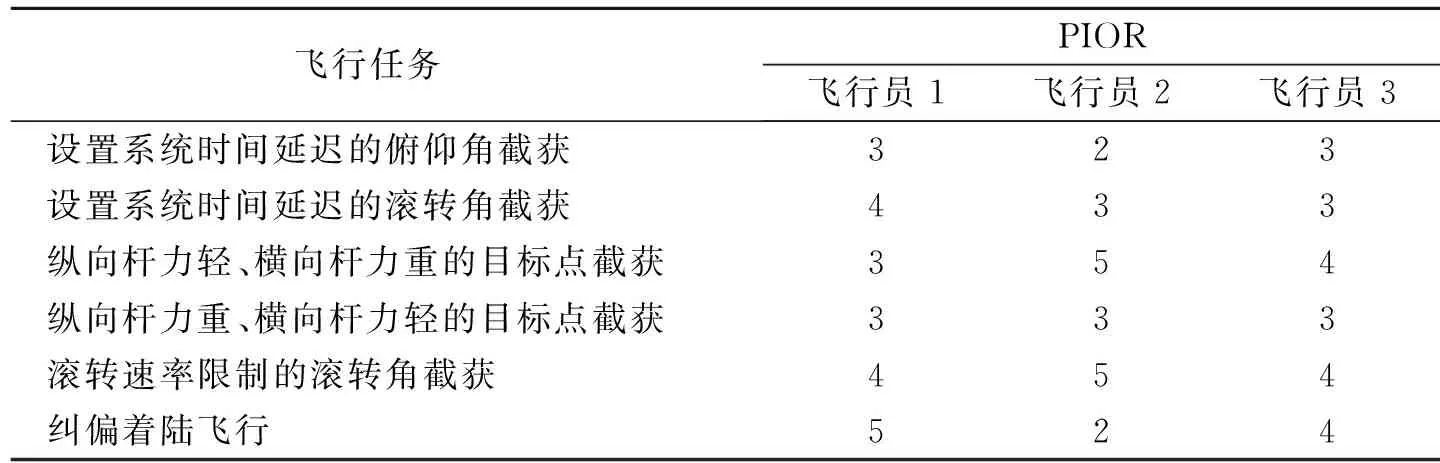
表2 飞行员评定结果
(1)设置系统时间延迟的俯仰角截获
在该飞行任务中,3名飞行员中有2名给出了PIOR=3的评分,执行飞行任务过程中飞机出现了振荡,完成截获任务有一定的难度,需付出额外的工作负荷,但经过努力能够完成任务。另外1名飞行员给出了PIOR=2的评分,任务出现了较小的超调,但经过少量的补偿操纵可以完成任务。
(2)设置系统时间延迟的滚转角截获
在该飞行任务过程中,3名飞行员中有1名给出PIOR=4的评分,飞机出现了较大超调和横向振荡,响应的预测性很差,无法完成任务。另外两名给出了PIOR=3的评分,任务出现了超调,需牺牲任务并进行努力操纵才能消除振荡趋势。
(3)纵向杆力轻、横向杆力重的目标点截获
在截获目标点飞行任务中,3名飞行员中有1名给出PIOR=5的评分,一开始做急剧截获时飞机就发生了振荡发散,松杆后振荡逐渐收敛,PIO趋势较为明显;1名给出PIOR=4的评分,虽然难以完成截获任务,并出现了振荡,但振荡并未发散;另外1名给出了PIOR=3的评分,经过飞行员努力操作,完成了目标点截获任务,但是出现了少量振荡。
(4)纵向杆力重、横向杆力轻的目标点截获
在该飞行任务中,3名飞行员全部给出了PIOR=3的评分,其中有2名飞行员反映比纵向杆力轻、横向杆力重的截获目标点飞行任务容易很多,有1名飞行员感觉与前一种设置执行任务难易程度相当。
(5)滚转速率限制的滚转角截获
在该飞行任务中,3名飞行员中有1名给出了PIOR=5的评分,在精确截获过程中,飞机出现了大量的超调、操纵反效和剧烈的且趋于发散的横向振荡,响应的预测性非常差,无法完成任务,通过冻结驾驶杆实现了开环,改出了飞机振荡状态。另外2名给出了PIOR=4的评分,在出现振荡后放弃执行任务并改出机动。
(6)纠偏着陆飞行
在无时间延迟的正常着陆任务中,没有振荡现象,飞行员都能够较为容易地将飞机降落在期望的范围内。在飞机正常状态的纠偏着陆过程中,飞行员仍旧可以轻松地对准跑道中线和控制飞机的下滑轨迹和速度,但由于任务难度增大,所以任务完成的质量略有下降,接地误差较正常着陆略大。
在设置时间延迟的纠偏着陆飞行任务中,飞行员为使飞机对准跑道中线和保持下滑角,需要不断地进行横向和纵向修正,导致发生了不同程度的纵向和横向振荡。1名飞行员给出了PIOR=5的评分,在接地前对正中线时出现了严重的横向振荡,飞机在横向上的响应基本是反效的,滚转响应与飞行员的期望存在明显的相位延迟,并且有抑制不住的发散趋势,飞行员感觉机翼即将接触跑道,在教员的操纵下实现了复飞。另外1名飞行员给出了PIOR=4的评分,在接地前出现了横向振荡,立即拉杆复飞。最后1名飞行员给出了PIOR=2的评分,虽然在接地前出现了少量横向振荡,但是通过操纵修正后消除,并顺利实现了预定目标的着陆。
分析3名飞行员的PIOR评分情况,可以发现如下一些规律性的现象:
(1)飞机特性不佳是导致诱发PIO的主要因素。3名飞行员对6类飞行任务中的4类任务PIOR的打分较为一致,尤其是在飞机滚转速率限制的飞行任务中,3名飞行员都给出了PIOR=4和PIOR=5较高的分值。
(2)对同一飞机系统状态、相同的飞行任务,不同飞行员的操纵导致PIO趋势的强弱也有差异。尤其是在纠偏着陆飞行任务中PIOR分值差异较大,表明了飞行员是形成PIO闭环中的重要一环。
(3)PIO现象多发生在飞行员需要高操纵增益来完成的任务中,尤其在俯仰角和滚转角截获任务中更加明显,急剧截获都比普通截获诱发出的PIO趋势要高。
4结束语
本文的研究内容是国内首次由飞行员在飞行真实环境下进行的PIO飞行培训,飞行员在“特性不佳”的飞机上充分体验了PIO现象,掌握了发生PIO趋势后的处置方法,并掌握了PIOR评定方法。本研究对飞行员培训和飞行试验具有重要的借鉴意义。
由于本文涉及的变稳飞机加装的测试设备有限,因此对PIO的评定方法仅限于飞行员的PIOR评定。下一步计划在另一型变稳机中加装更多的测试设备,培训后采用其他PIO评定准则进行计算分析,并与飞行员PIOR评定结果进行对比研究。
参考文献:
[1]周自全.飞行试验工程[M].北京:航空工业出版社,2010:464.
[2]冯亚昌,李陆豫.电传飞机人机闭环系统的诱发振荡[J].北京航空航天大学学报,2000,26(1):30-33.
[3]吴蔚,方振平.现代飞机俯仰跟踪时诱发振荡预测分析[J].飞行力学,1998,16(3):45-50.
[4]王永熙.飞行控制系统对驾驶员诱发振荡的影响[J].航空学报,1997,18(1):17-21.
[5]方振平,吴屹东.现代飞机驾驶员诱发振荡机理和预测研究[J].飞行力学,1997,15(3):48-54.
[6]Powers B G.Space shuttle pilot-induced-oscillation research testing[R].NASA-TM-86034,1984.
[7]刘艳,高正红,赵涛,等.民用飞机适航取证中APC/PIO评估方法[J].飞行力学,2010,28(6):6-10.
(编辑:姚妙慧)
Research on the method of PIO flight training and assessment
YANG Ting-jian
(Ministry of Science and Technology, CFTE, Xi’an 710089, China)
Abstract:This paper summarizes the pilot induced oscillation (PIO) flight training and PIO rating (PIOR) method. According to the mechanism of PIO, three factors inducing PIO were analyzed. In variable stability aircraft, key system parameters which could cause PIO were set, high gain flight training tasks were designed. Three pilots completed the tasks,who gave a quantitative evaluation of aircraft PIO tendency using the PIOR. PIO flight training method and assessment method of flight was researched. The results show that it is feasible to perform PIO flight training on variable stability aircraft. PIOR can effectively assess PIO tendency level.
Key words:pilot induced oscillation; flight training; PIO rating assessment
收稿日期:2015-11-27;
修订日期:2016-03-08; 网络出版时间:2016-03-09 15:59
作者简介:杨挺健(1973-),男,甘肃宁县人,高级工程师,硕士,研究方向为飞行控制系统飞行试验。
中图分类号:V212.1
文献标识码:A
文章编号:1002-0853(2016)03-0076-05
