利用轨迹融合法获取直升机起降临界决断点
2016-07-01于琦
于 琦
(中国飞行试验研究院 飞机所, 陕西 西安 710089)
利用轨迹融合法获取直升机起降临界决断点
于琦
(中国飞行试验研究院 飞机所, 陕西 西安 710089)
摘要:为了有效规避传统直升机起降临界决断点试飞方法固有的风险,将试飞分解为近地面的全发起降轨迹确认试验和在回避区以外较高的安全高度上不同发动机失效点的单发失效加速性试验,然后对以上试验获取的水平距离-高度轨迹进行融合叠加,获得了直升机的起降临界决断点结果。使用某型直升机进行了试飞验证,结果表明该方法具有较好的工程应用效果。
关键词:直升机; 飞行试验; 适航性
0引言
起降临界决断点(CDP)验证试飞是民用直升机进行A类适航符合性验证的重要科目。通常在申请的机场环境下,双发直升机采用一发慢车或关车模拟单发失效(OEI),分别在可重复的起飞和着陆机动中完成中断起飞/继续起飞或继续着陆/中断着陆机动,以验证CDP的位置[1]。该科目试飞存在一定的风险,其主要原因是直升机发动机的可用功率有限,导致直升机的加速响应较慢,且距离地面特别近,容易出现直升机触地,这就要求试飞员对直升机的飞行状态判断准确,处置动作及时到位。
直升机的CDP位置是用离地高度(Hr)和校准空速(Vc)表达的。其位置是由在发动机失效点(EFP)前一刻的直升机可用能量(EPT)及在EFP后加速至起飞安全速度(Vtoss)过程中的能量损耗(ELS)之比决定的。由此设想:设定不同能量状态的EFP将试验动作进行分割,分别在真实场高进行全发(AEO)起飞和着陆试验,在安全高度进行多个EFP上的OEI加速性试验,依次获得EPT和ELS;然后将以上两个阶段的直升机飞行轨迹在必要的换算后进行融合处理,以适航标准中规定的最低安全限制条件作为临界结果,进而反推出直升机CDP的位置。
为验证本文方法的可行性,以某大型直升机为试验机,分别针对开阔机场条件和平台机场条件设计了试验动作,使用双发限制功率模拟OEI开展了CDP试飞,以验证该方法的可行性。
1试验方法设计
直升机CDP试飞中的飞行轨迹应处于直升机回避区之外,获得回避区边界是本试验状态点选取的前提条件。回避区的试飞方法参见文献[2],本文不做赘述。常规的CDP试飞方法由连贯的AEO起降动作和某一点后的符合操纵要求的持续OEI加速动作组成,直至在最低安全离地高度(Hsf)以上获得Vtoss为止[3]。
本试验选定若干能量由高到低的EFP点将常规的CDP试飞动作分割为两部分:一组进行正常起降飞行轨迹的确认;另一组在安全高度完成单发加速性试验。前者给出了AEO起降过程中由水平位移(L)和Hr表达的轨迹,并建立起降过程中Vc与Hr之间的关系,用以支持后一组加速性试飞OEI起始位置的选取。后者试飞的目的是获取不同能量状态的OEI加速飞行中的加速距离(Lac)与高度损失(ΔHr)之间的关系。
将Lac-ΔHr轨迹换算至起降场高度的标准值,依据文献[1]中有关直升机加速过程中最小安全高度和应急功率使用时间限制作为边界条件,将L-Hr与Lac-ΔHr进行叠加融合,可反推获得CDP的位置。

图1 轨迹融合法的直升机CDP试验流程Fig.1 Helicopter CDPs test process with the superposition of paths
2直升机全发起降轨迹确定
根据已有的直升机回避区边界选择安全起降通道,使用试验机分别实施开阔机场和直升机平台条件下的AEO起飞和着陆动作,通过建立相对稳定的Vc-Hr关系,获得可重复的直升机起降轨迹[3]。
2.1开阔机场起降轨迹
在开阔机场,直升机AEO起飞采用可以兼顾起飞效能(有效载重)和减少对机场依赖程度的地效内增速起飞方式。首先保持直升机垂直离地高度2.5 m,在地效进行悬停;然后一直保持在地效内的高度进行增速前飞,将速度由0一直增加至35 m/s左右,同时飞行高度从离地高度2.5 m增加到8 m;最后待达到Vtoss约35 m/s后,直升机保持前飞速度,增距并带杆转入爬升,直至飞越障碍高度,完成起飞。
通过测试数据可获得起飞轨迹的Vc-Hr关系,如图2所示。着陆轨迹中Vc-Hr测试结果如图3所示。
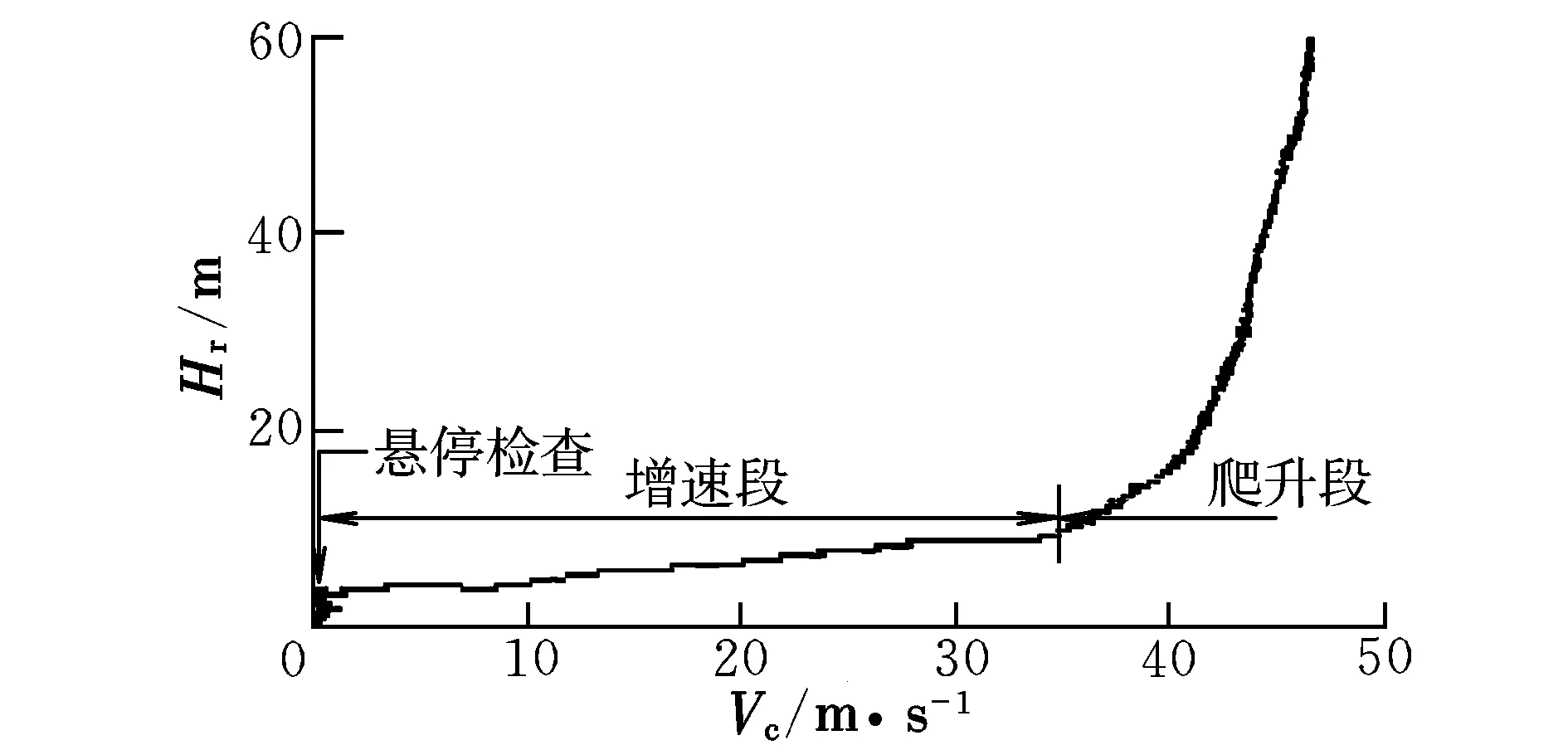
图2 开阔机场AEO正常起飞Vc-Hr曲线Fig.2 Curve of Vc-Hr path of AEO runway takeoff

图3 开阔机场AEO着陆Vc-Hr曲线Fig.3 Curve of Vc-Hr path of AEO runway landing
直升机在开阔机场的AEO着陆采用的是连续消速和降低高度的飞行方法。着陆前段呈现较明显的高度降低,下降轨迹角大约30°~35°;随着逐渐接近地面,下降率逐步减小,下降轨迹角慢慢减小至5°~10°,同时飞行速度减小较快,主要表现在水平速度的快速消减上。
2.2平台起降轨迹
本试验采取在开阔机场表面限定某区域模拟直升机平台起降的方式进行试验。
选择2015-09—2017-09在我院牙周科就诊因牙髓及根尖周病变引起的Ⅰ型牙周-牙髓联合病变的患者28名,共38个患牙;其中男15例,女13例,年龄28~64岁。纳入标准:①患牙有冷热刺激痛、自发性疼痛、夜间痛、咬合痛等症状;②牙龈红肿出血、溢脓,经根管治疗及牙周非手术治疗后,患牙仍存在至少1个位点的探诊深度(PD)≥5 mm,牙齿松动度(TM)≥ Ⅱ 度,有 Ⅱ 度及以上根分叉病变; ③ X线片示硬骨板消失,牙槽骨高度下降,或呈典型的“烧瓶状”病变,即根尖周稀疏区与牙槽嵴吸收相连; ④ 知情同意。本研究经南通市口腔医院伦理委员会审批(批准文号:2017第2号)。
直升机在平台机场通常采用垂直起降的方式进行起飞和着陆。起飞时首先垂直爬升至安全高度,然后再推杆转入前飞。根据国外多型直升机平台起飞操纵的推荐方法,试验中采用了推荐的后退爬升的起飞方式,同时带有一定的侧向位移,保证了正驾驶始终保持对平台的良好目视状态,便于应急返场[4]。平台机场着陆中,首先在无地效高度消速至零,采用陡下降或垂直下降的定点着陆方式进行着陆。此过程对最终的悬停点位置要求较高,为了数据处理方便,特制订相对平滑的飞行轨迹作为理想轨迹控制。
直升机在平台机场起飞和着陆过程的Vc-Hr关系分别见图4和图5。

图4 AEO平台起飞Vc-Hr关系Fig.4 Vc-Hr path of AEO helipad takeoff

图5 AEO平台着陆Vc-Hr关系Fig.5 Vc-Hr path of AEO helipad landing
3直升机单发失效加速试飞
3.1爬升过程的单发失效加速性试飞
试验直升机在某安全高度进行模拟起飞爬升,由大到小设定不同的速度点作为发动机失效点的速度(VEFP),分别为80 km/h,65 km/h,40 km/h和0 km/h(悬停)。在该速度点调整发动机功率模拟OEI状态,在规定的时间延迟后推杆进行增速,并保持功率稳定。在达到预定速度(本试验中根据模拟单发爬升试验结果,设定Vtoss=110 km/h[5])后带杆,直至消除下降率进入稳定的平飞或爬升飞行状态,或者达到2 min应急功率持续时间再恢复AEO功率状态。使用测试系统测量加速过程中的飞行轨迹,获取增速至Vtoss的最大高度损失。所获得的加速试验结果如图6所示。

图6 直升机模拟OEI加速试验的起飞过程Fig.6 Curves of various VEFP OEI acceleration tests in takeoff
可以看出:随着失效点速度的增加,加速轨迹越来越趋于平缓;达到Vtoss后,其爬升轨迹角基本一致。
与处理爬升性能的方法类似,以上获得的结果需依据动力相似的原则对密度高度进行换算,从而得出对应于地面高度大气条件、标准飞行重量(Ws)及设计最优的旋翼转速(nR,opt)条件下的OEI加速过程中的下降率Vz,c。忽略加速过程中不同机身迎角下阻力系数对加速时间的影响,可分别给出标准OEI状态可用功率(POEI,s)、垂向速度(Vz,c)、高度损失(Hlos,c)、水平速度(Vs)和水平加速距离(Lac)[6-7]:
(1)
(2)
(3)
(4)
(5)
式中:W0为地面起降轨迹确认试验飞行重量;WH为OEI加速试验重量;nR,i为OEI加速试验中实际旋翼转速;PE为近地面高度单发应急功率;POEI,s为近地面单发可用功率;POEI,i为加速试验中用到的单发功率;θ为机身俯仰角;t为加速时间。经换算后,直升机OEI加速数据处理结果如表1所示。
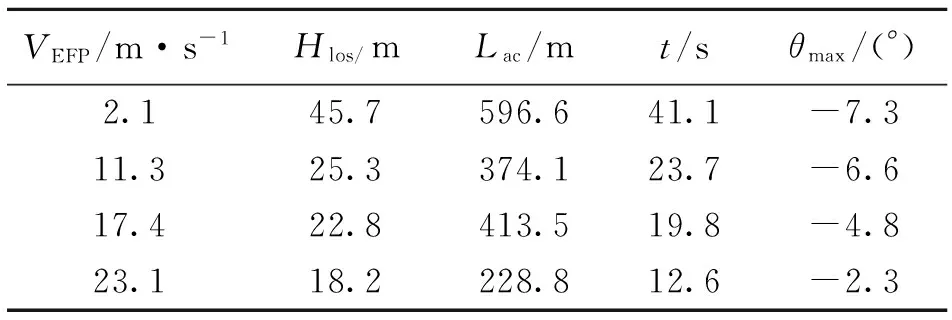
表1 起飞状态模拟发动机在不同速度下
3.2下降过程中的单发失效加速性试飞
直升机在安全高度模拟着陆前的下降消速试飞中,要求在分别达到设定的不同VEFP后,首先将油门杆调整至OEI功率状态进行增速,并保持功率不变;然后在达到拉平速度(Vr)后,带杆直至消除下降率,建立稳定的爬升飞行状态,或达到2 min持续时间;最后再恢复AEO飞行状态[8]。飞行过程中测量加速过程中的飞行轨迹,获取直升机达到Vtoss的最大高度损失Hlos。
实际飞行中,分别针对开阔机场和高架平台机场的着陆轨迹完成了两个EFP速度点的组合试验,分别为:VEFP1=10.6 m/s和VEFP2=14.5 m/s。试验结果如图7所示。经换算后的数据结果如表2所示。

图7 直升机模拟OEI加速试验的降落过程Fig.7 Curves of various VEFP OEI acceleration tests in landing path

VEFP/m·s-1γ/(°)Hlos/mLac/mt/s11.537.641.8441.726.720.616.122.1369.217.1
4获取临界决断点结果
首先将OEI加速试验获得的结果进行高度换算后,然后再将设定的VEFP点与近地面的AEO起降L-Hr轨迹进行“叠加”,即可从速度和高度损失两个关键值给出两种典型环境下直升机起飞(TDP)和着陆临界决断点(LDP)的高度和速度位置。
表3给出了所获得的某直升机CDP结果。
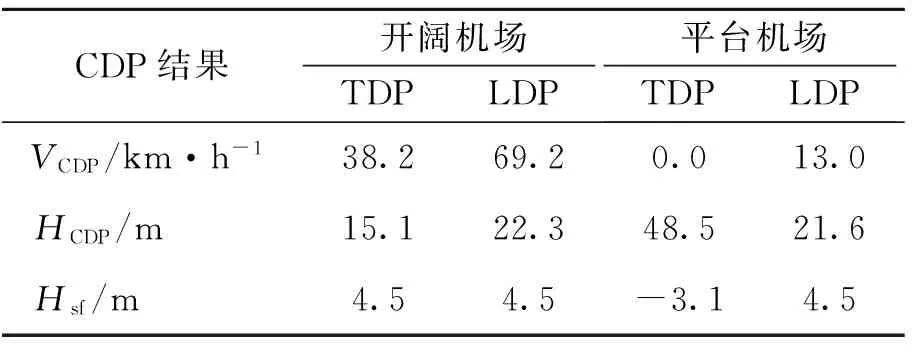
表3 不同起降环境下的CDP结果
对于平台机场,允许直升机进行中断着陆或继续起飞动作过程中飞行轨迹低于平台高度,且在加速过程中直升机任一点与平台的最小安全距离不小于15 ft(4.5 m),因此俯冲加速过程中水平位移、航迹角和偏航角或侧向偏移量都共同决定了CDP位置。
图8给出了该型直升机在直径为30 m的高架平台机场上,在无侧移、偏航角为0°条件下的TDP的数据叠加效果。

图8 平台机场CTO轨迹Fig.8 CTO path on helipad
在直升机下视角范围试验和单发水平加速性能试验中,设定起飞航迹角为120°,即直升机以-60°的航迹角后退爬升。如果采用文献[9]中推荐的在爬升中引入一定的侧移量或偏航角的方法,直升机TDP高度会大幅度下降,可以明显提高直升机对平台场地的适应性。
5结束语
本文在分解直升机CDP试飞风险组合的基础上,探讨了一种通过分解试飞环境、分架次试验进行数据融合获取CDP结果的试验方法,并针对某型直升机进行了方法验证试飞。结果表明,使用该方法可以消除传统试验方法的固有风险,并获得了精度可接受的CDP结果。此外,使用此方法可以充分利用直升机日常正常起降飞行和单发训练的飞行结果,有效降低试验成本并控制风险。
参考文献:
[1]中国民用航空总局.运输类旋翼航空器适航规定:CCAR-29-R1[S].北京:中国民用航空总局,2002.
[2]US NTPS.USNTPS-FTM-No.106:rotary wing performance flight test manual [Z].VS,NTPS.1992.
[3]美国联邦航空局.运输类旋翼航空器适航规定咨询通告:AC29-2C[S].沈阳:中国民航沈阳航空器适航审定中心,2010.
[4]Prouty R W.Helicopter aerodynamics [M].PJS Publications Inc,1982:55.
[5]于琦.民用直升机起降临界决断点试飞技术[D].西安:西北工业大学,2011.
[6]杨松山.直升机飞行品质试验技术[Z].西安:中国飞行试验研究院,2001.
[7]US Army Materiel Command.Helicopter performance testing: engineering design handbook (AMCP 706-204) [M].US Army materiel command,1974.
[8]Cole J L,Evans C W,Greenberg C E.Development and qualification of the S-76C+helicopter with 30-second/2-minute OEI power ratings[J].Journal of the American Helicopter Society,2011,46(2):117-128.
[9]Goldenberge J,Meslin L,Blondino M,et al.Certification of model 230 helicopter category a elevated helipad operations [C]//American Helicopter Society 49th Annual Forum.Saint Louis,MO,USA,1993:1424-1432.
(编辑:崔立峰)
Helicopter CDPs’ acquistion technology by the superposition of paths
YUQi
(Aircraft Flight Test Technology Institute, CFTE, Xi’an 710089, China)
Abstract:It’s an acceptable way to control the hazard associated with the common method used in the helicopter CDPs tests by disassembling the tests into two phases—the path confirming tests of AEO takeoff or landing near the ground, and the OEI acceleration performance tests in the safe height above the limited H-V diagram region. The CDPs can be obtained by superposing the converted paths expressed in Lac-Hr that is provided in the previous tests. An integrated demonstration test used a helicopter in various airdrome is depicted in this paper, and the test results proves the feasibility of the method.
Key words:helicopter; flight test; airworthiness
收稿日期:2016-01-14;
修订日期:2016-03-23; 网络出版时间:2016-03-25 10:49
作者简介:于琦(1974-),男,河北黄骅人,高级工程师,硕士,主要从事直升机飞行试验研究工作。
中图分类号:V217.3
文献标识码:A
文章编号:1002-0853(2016)03-0090-05
