船舶电站功率自动控制系统的设计
2016-06-25康小伟
康小伟
摘 要:电站自动化最主要的目的是保证船舶供电的连续性、可靠性和供电品质。在阐述船舶电站一次系统及其控制功能的基础上,利用先进的控制技术PLC+PPU设计了一套船舶电站功率自动控制系统方案,并就船舶电站主要功能的实现进行了论述。实践证明,该设计方案能够提高船舶电站供电系统的可靠性和稳定性,值得广泛推广。
关键词:船舶电站;功率自动控制系统;供电品质;PLC+PPU
中图分类号:U665 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.12.108
船舶电力系统是孤立于陆地的独立电网,它是产生、输送、分配、使用电能的装置和用电网络的总称,由用电设备、装配电装置、发电装置和电缆等组成。船舶电站是船舶所需的全部电能的来源,处于船舶电力系统的核心地位。因此,船舶电站运行的可靠性、经济性和自动化程度对保证船舶安全、经济航行有着重要的意义。但随着船舶的大型化、多功能化和自动化程度的不断提高,越来越多的船用设备需要电能来驱动和控制,这就使船舶电站日趋复杂、庞大,对船舶电站提出的要求越来越高。自动化是船舶电站发展的突出标志之一,因此,对船舶电站的自动化系统加以研究和应用成为了十分必要和迫切的工作。为实现船舶发电机电力的自动分配,并以多种方式监视、保护、控制和调节发电机及供配电网络,确保船舶电站连续优质供电,本文以某81 m电力推进内河运输船为例,重点就基于PLC+PPU的船舶电站功率自动控制系统的设计展开探讨。
1 船舶电站的一次系统及其控制功能
电力推进内河运输船是以柴油发动机为主推进动力的适用船舶。81 m电力推进内河运输船属于大型运输船,货船上的主要负载有推进装置、冷藏装置和货运装置等。为了使船舶电站满足负载功率的要求,设计了3台240 kW、690 V同容量的发电机。电站母线用1台隔离开关分成2段,每段母线上均有电源接入和馈电接出。其中,一段母线接入1号、2号发电机,并网接出1#冷藏集装箱变压器、1#主变压器和1号电推变频器;二段母线接入3号发电机,接出2#主变压器和2号电推变频器。根据该电站的电气主接线,需要设计4块主配电板,分别为1号主发电机控制屏兼AC690 V负载屏、2号主发电机控制屏兼AC690 V负载屏、同步屏AC690 V负载屏、3号主发电机控制屏兼AC690 V负载屏。
由于电力推进内河运输船航行方式的变化和承载货物大小的不同,船行的负载总是在变化,发电机组的运行状况也在不断变化,单台发电机供应全船电力需求,或2台、3台发电机组并网运行供应全船电力需求。因此,发电机有并网、负载转移,机组解列等多种运行状态需要控制。
2 船舶控制系统的设计方案
2.1 对船舶控制系统的要求
根据船舶负载的功率需求,控制系统需要实时监测和控制发电机在网运行数量,自动处理电能分配。在供电系统出现故障时,控制系统应采取各种措施,尽可能保证对负载的连续供电。
控制系统应具备以下功能:①当运行机组发生Ⅱ类故障时,系统应根据优先级在30 s内自动启动备用机组,并完成并网、负载转移,故障机组解列。②当运行机组发生Ⅰ类故障突然停机时,系统应根据优先级在45 s内自动启动备用机组,并自动完成对电网供电。③负载增大且电站超载时(≥90%Pn,延时30 s),启动备用机组,自动并车,自动调频调载对负载供电。Pn为单机或多机的额定功率。④负载减小且电站轻载时(≤30%Pn,延时5 min),后并车的柴油发电机组自动负载转移、解列。⑤发电机组并联运行时超载(≥90%Pn)报警,延时20 s后自动卸载。⑥自动并车,自动调频调载,分配负荷。⑦具备报警及保护功能(有频率、电压超标、逆功等保护)。⑧监视主推进系统和大负载设备的启动,为其启动和运行释放足够的功率,或根据船舶运行工况,发出功率使用限制信号。
2.2 船舶控制系统的设计
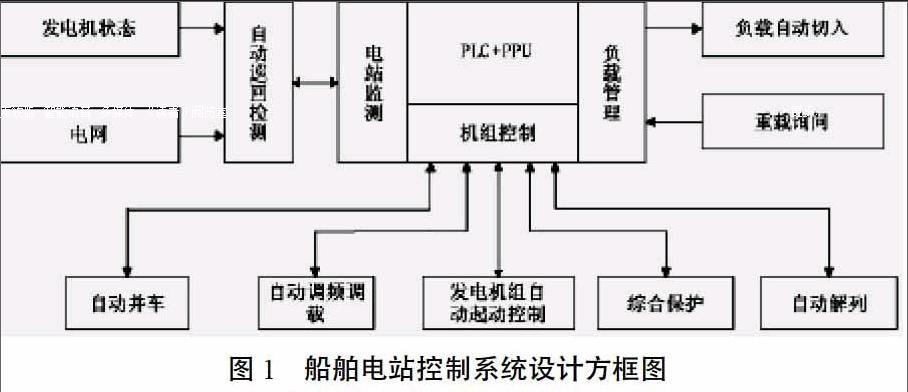
控制方案采用以PLC+PPU为控制核心的控制系统,实现船舶电站的功率管理,实现发电机组的并车、解列和调频调载等功能。图1所示为船舶电站控制系统设计。
以PLC为电站管理中心,根据不同情况下船舶的用电需求,在逻辑运算后,PLC发出控制指令给发电机管理模块(PPU),由PPU实现发电机机组的起停、并车、解列和功率分配等功能。在此,PLC选用西门子公司的S7-300,CPU为317-2DP。根据实际需求,PLC模块包括4个数字量输入模块、2个数字量输出模块、1个模拟量输入模块和1个模拟量输出模块,各个模块之间通过总线连接器连接。
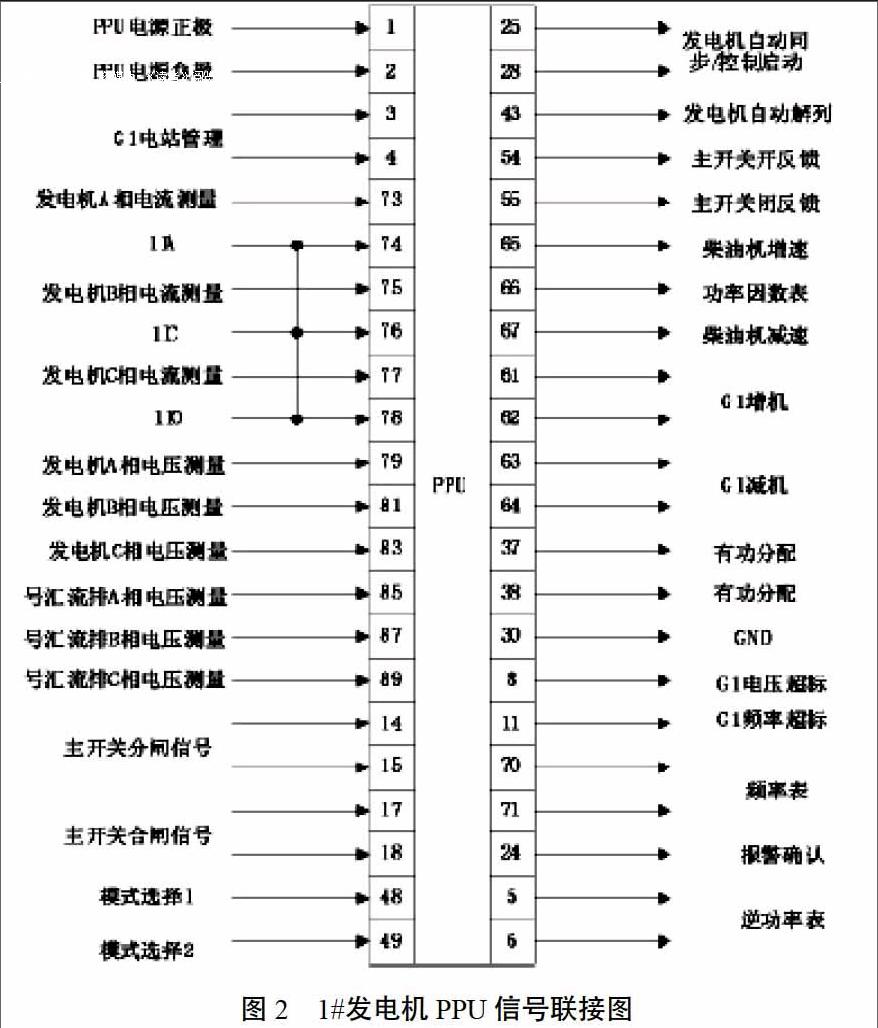
发电机管理模块采用丹麦DEIF公司生产的PPU。每台发电机均由1台PPU控制。其中,1#PPU对1G发电机组进行控制和监测,其信号连接如图2所示;其余两台PPU分别控制2G和3G发电机,信号接线图与图2相同。
3 船舶电站主要功能的实现
3.1 并车运行程序的设计
根据船上的负荷变化,船舶发电机可能是1台投入运行,也可能是2台或3台并列运行。当控制系统检测到电站储备功率不足时,就会产生增机指令;与此同时,可以检测到启动机组运行的启动条件。当启动条件满足要求时,PLC便会发出启动指令。如果检测到电气故障或机械故障,则转向下一台机组。
投入电网并联运行的发电机组不能与电网立即接通,否则将导致并车失败,严重时,将会导致全船失电,甚至使机组受到电磁和机械的有害冲击。因此,并车时应使合闸冲击电流最小,以便合闸后能迅速同步并联运行。
机组并车完成时,需要对并网运行的机组进行调频调载,以实现负荷的合理分配。当G1、G2提供的功率满足不了船舶负载的需求时,需要对G3实施并车运行。
3.2 解列机组的程序设计
在并网机组运行轻载的情况下,负荷过低或机组故障会造成机组功率下降,因此,需要按优先级顺序解列某台机组。
在船舶电站中,当检测到并网运行的机组负载功率低于额定功率的30%或机组出现故障时,PLC会向相应的机组发出“自动解列”指令。延时180 s后,解列机组。在解列机组时,当退出机组的功率小于额定功率的5%时,该机组主开关便会分闸,紧接着发出停机指令。机组停机电磁阀动作之前先空运300 s,然后使机组停机。
3.3 船舶重载询问程序设计
大型的电力推进内河运输船有一些大功率设备,启动时电流较大。如果直接启动,可能导致在并网运行的备用机还没启动时供电网络就已崩溃,因此必须设计重载询问模块。在大负载投入运行前,控制系统首先判断供电负荷与启动的大功率负荷之和有无超过运行机组的最大负荷。如果没有超过,则允许其启动。否则,应先启动另一台备用发电机,使储备功率达到要求后再启动。如果超过要求,则禁止重载启动信号。重载询问模块的功能是防止重载启动的冲击电流对电网造成影响,保证电站连续、稳定地运行。
4 结束语
总之,随着船舶制造业的不断发展,船舶电站的自动化要求在不断提高。由于电站是船舶的关键部位之一,它的可靠性和灵活性将直接影响船舶航行的质量,起着非常重要的作用。为此,对船舶电站的自动化系统加以研究和应用是非常必要和迫切的工作。本文设计了一种基于PLC+PPU的船舶电站功率自动控制系统。实际运行结果表明,该控制系统的应用使电力推进船舶的供电系统达到可靠性、稳定性和灵活性供电的要求,可供参考和借鉴。但由于本文篇幅有限,并没有一一列举需要注意的问题。因此,在船舶电站功率自动控制系统的实际设计中,认真分析各种不稳定因素的来源,并采取各种有效措施是不容忽视的。
参考文献
[1]吕金华.船舶电站自动控制系统的可靠性设计[J].电力学报,2002(02).
[2]樊琦.船舶电站自动控制系统的设计与研究[D].秦皇岛:燕山大学,2014.
[3]白一鸣.船舶电站自动监控系统的设计与研究[D].大连:大连海事大学,2009.
〔编辑:刘晓芳〕
