工业机器人位置准确度检测及校准简述
2016-06-24缪理清
缪理清
(上海飞机制造有限公司,上海 200436)
工业机器人位置准确度检测及校准简述
缪理清
(上海飞机制造有限公司,上海 200436)
摘 要:本文主要基于ISO规范,对产品生产线中所用的KUKA机器人位置准确度检测和校准问题,从理论分析到实际操作进行详细说明。工业机器人技术的不断提高对单位所负责的国家重大专项任务产生了有力的推进作用。
关键词:机器人 位置准确度 检测 校准
随着产品的零部件用量和复杂程度的增加,作为零部件生产线中铺贴工序的某型铺贴机器人设备也逐步体现出重要性。本设备所处工序对产品精度和内部质量非常重要,需要根据设备维护要求对机器人执行器末端的位置准确度进行定期检测和校准。本文将重点阐述对本设备机器人位置准确度的检测及校准。
1 设备基本信息
本设备是典型的卧式机器人作业设备。6轴电动机器人型号:KUKA Quantec KR210 R3100 Ultra;位置精度指标:0.7mm;重复位置精度指标:0.1mm。为了实现上述精度和输出力矩,控制系统改为基于西门子840D sl。
2 检测方法及原理简述
位置准确度采用极坐标测量法:在机器人的末端执行器(或靠近腕部)安装反射器(靶球)作为目标,用具有跟踪系统作用的激光跟踪仪瞄准反射器,从而得到距离数值和两个轴的方向角数值,由此计算出机器人的位置,形成空间中的距离-方向角测量结构。
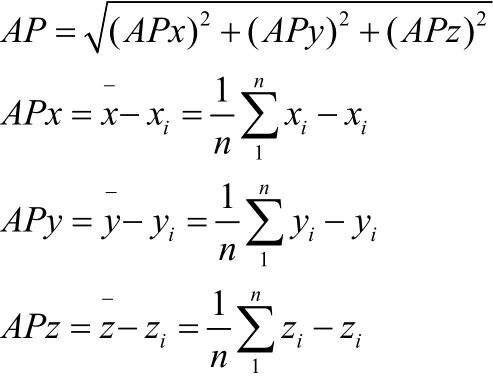
位置准确度的计算方法:在设定的X轴点位(1~21.5m,步进0.1m),使机器人末端靶球沿着立方体的斜平面外缘(ACC’A’)进行运动。通过计算,计算出该点位的斜平面中心点P的x、y、z位置,具体计算公式如下。
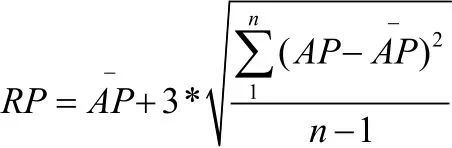
位置重复准确度则表示对于同一个位置定位指令,从同一个方向上重复多次后实际到达位置的一致程度,计算公式:
上述两项精度需要按照机器人运动额定速度的10%、50%、100%执行三次,并循环n=30次。
采用此方法的优点:具有高分辨率,工作空间大,无接触测量。因此,它适用于本设备机器人目标跟踪的动静态位姿测量。
采用的标准:ISO9283中选择第7.2.1和7.2.2条的内容。
3 检测结果
可以得到如表1所示的一个检测精度表。
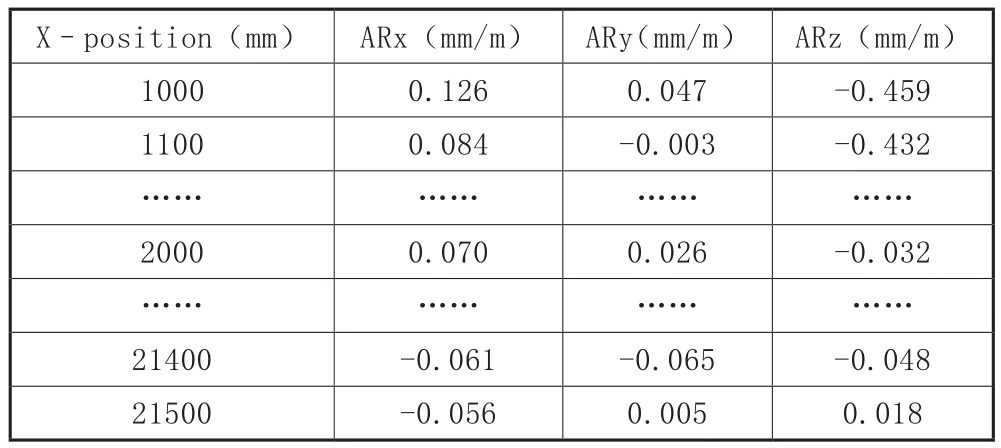
表1 检测精度表
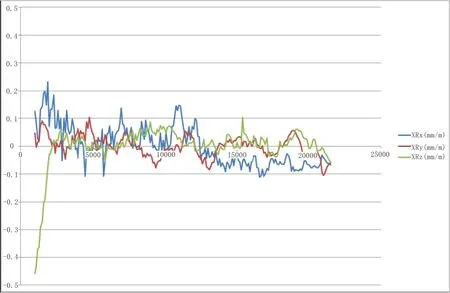
根据前述公式,可以计算出位置准确度和位置重复准确度分别为0.545mm和0.036mm,精度符合指标。
4 补偿校准简述
上述测得的精度数据符合要求,如不符合要求,则需要进行校准后再次检测,直至符合要求为止。
一般来说,校准的过程包括建模、测量、参数识别和补偿四个环节。在此,简单化的认为机器人的位置精度误差是由于关节轴倾斜和关节偏移等几何误差造成(造成的原因主要源自于关节驱动系统的相关零部件)。因此,可以利用校准后的结果,直接在关节空间修正。
对于某可达位置,重新计算其关节值,来达到提高机器人位置精度的目的。
需要说明的是,此类校准(不仅包括位置准确度等指标)属于关节级校准,仅需要有关节位置传感器(圆光栅)的线性模型。考虑到关节位置传感器的增益一般都设定准确,属于第一级的线性补偿。
在实际使用过程中,可能会出现关节位置精度超差、方向相似等现象,导致机器人整体位置精度出现更大超差的情况。因此,需要在关节和连杆之间构成的空间运动学关系的基础上,对机器人末端执行机构的有效工作空间加设测量点,并进行反向补偿。
5 总结
本文对工业机器人位置准确度检测进行了初步阐述,并对精度校准的分级和可行性方法进行了初步讨论,将有效推进机器人在新工艺生产线上的使用和推广。
General Description of Positioning Accuracy for A Kind of Industrial Robot
MIAO Liqing
(Shanghai Aircraft Manufacturing Co.ltd(SAMC),Shanghai 200436)
Abstract:Widely use of automatic robot in industry is the hotspot and important method to promote industrialization 4.0.This paper is mainly focusing on the pos itioning-accuracy measurement and calibration work of KUKA robot which is used in the production line,based on the ISO s tandard,from theoretical analysis to actual operation. It can be forecasted that the improvement of robot technique will strongly promote the process of national project in our company.
Key words:robot,positioning accuracy,measurement,calibration
