雷达导引头技术状态认定仿真测试方法研究
2016-06-23崔连虎
徐 海,崔连虎
(91336部队,河北 秦皇岛 066326)
雷达导引头技术状态认定仿真测试方法研究
徐海,崔连虎
(91336部队,河北 秦皇岛 066326)
摘要:针对雷达侦察干扰装备试验的装备保障需求,分析了雷达导引头作为参试设备所需要进行确认的指标内容,介绍了采用半实物仿真试验系统对反舰雷达导引头进行指标测试的途径和方法步骤,充分利用仿真试验态势可控、精度高、效费比高的优点,解决了试验前对参试雷达导引头技术状态认定的难题。
关键词:雷达导引头;反舰导弹;仿真测试;半实物仿真
1引言
在开展雷达侦察干扰装备试验的过程中,采用实装雷达导引头作为参试装备是试验单位普遍采用的做法,这样可以为雷达侦察设备构建更为真实的末制导雷达威胁信号、验证干扰装备的干扰效果。作为参试装备,导引头自身必须要保持良好的技术状态,各项指标需要满足试验任务的需要。因此,在试验任务开展前,确定参试导引头的技术状态显得尤为重要。按照相关规定,需要对其进行技术状态认定。
对导引头进行技术状态认定,可采用的方式主要有实验室测试和外场测试。由于外场测试动用人员和装备多、实施难度大、效费比低,并不适合完成导引头技术状态认定任务,因此采取实验室测试是完成导引头技术状态认定任务应采取的主要途径。
半实物仿真除具有组织实施简单、效费比高的优势外,还具有精度高、参数设置灵活可控、保密性好等特点,可高效地完成导引头技术状态认定工作。本文介绍了单平面非相参雷达导引头技术状态认定仿真测试的测试项目以及测试流程,提出了合理可行的测试方法。
2仿真测试系统组成及工作原理
用于开展雷达导引头技术状态认定测试的半实物仿真测试系统主要由微波暗室、指挥控制系统、目标模拟系统、试验转台、仿真计算机、接口设备、数据库以及通信网络组成,如图1所示。
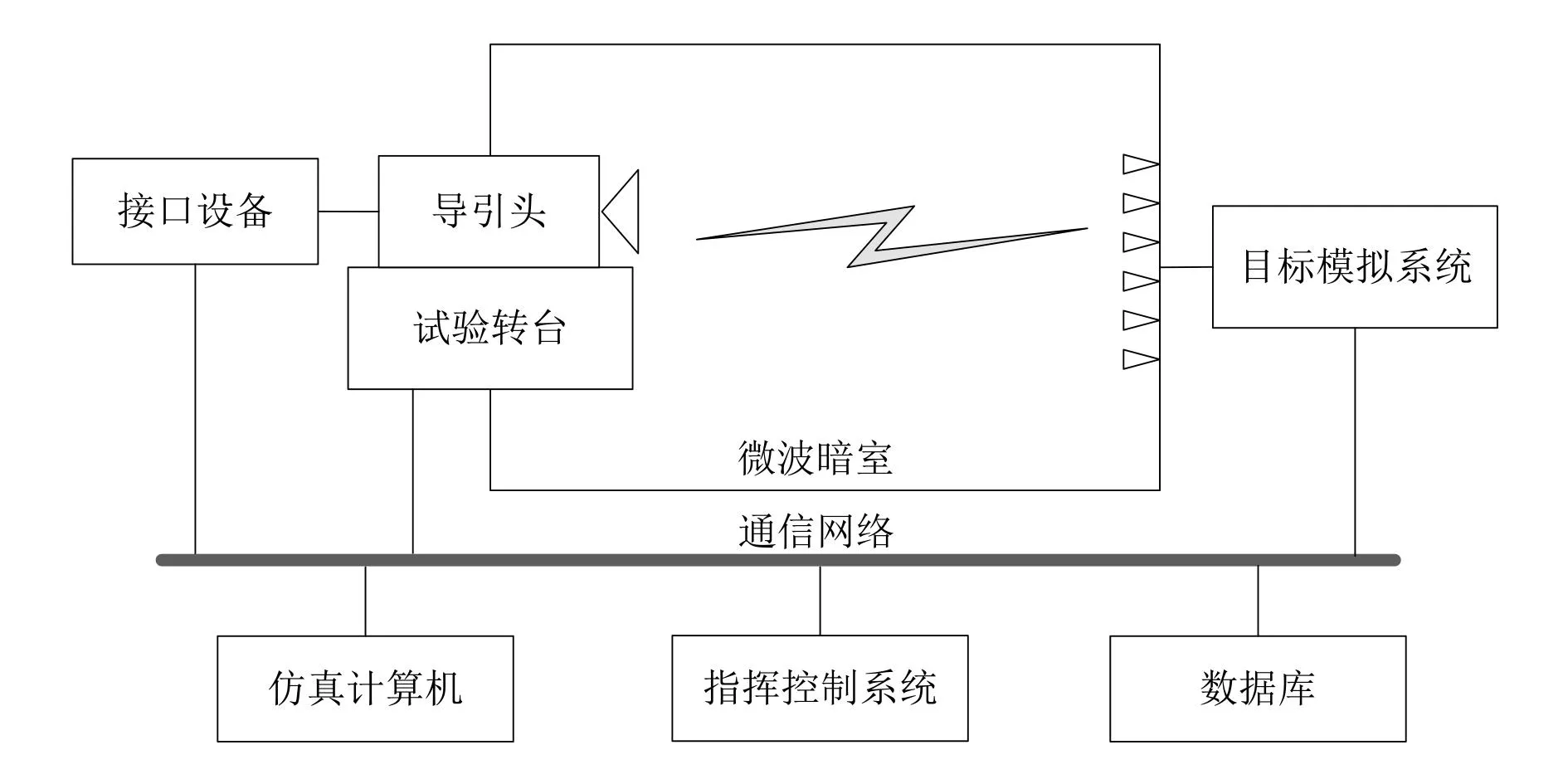
图1 半实物仿真测试系统组成图
完成导引头技术状态认定任务,主要是利用半实物仿真试验系统的开环测试功能,其工作原理如下。
被测试的导引头安装架设在试验转台上,用以模拟导弹的姿态,实现和目标的相对角位置关系。指挥控制系统根据测试项目制定测试态势想定并对试验过程进行控制。仿真计算机实现对各类信息的解算、通过接口设备对导引头进行控制,并控制仿真系统按照一定帧周期运行。目标模拟系统按照态势想定生成一定距离和方位的目标回波信号并通过微波暗室向导引头辐射。导引头接收到目标模拟器生成的目标回波后对其进行捕捉跟踪。导引头输出的各类指令和信息通过接口设备进行采集,并由数据库进行记录和存储,供事后进行分析处理。
3测试流程
开展导引头技术状态认定工作,需要建立完善的组织实施流程,以确保任务有序高效地进行,通常需要按照如下步骤进行。
3.1编制试验计划及试验方案
依据测试的内容和时间需求,制定详细的测试计划,划分测试岗位并确定岗位职责分工,编写仿真测试方案。
3.2目标模拟系统角位置精度标校
通常在开展导引头技术状态检测前一周左右进行,利用射频校准装置,在导引头捷变频率范围内,对目标模拟系统目标角位置模拟精度进行校准,精度应控制在2mrad以内。
3.3目标模拟系统通道功率标校
在目标模拟系统角位置精度标校之后进行,利用与被测试导引头同频段的窄带天线作为接收端,配合功率计或频谱仪进行功率标校,如图2所示。

图2 目标模拟器功率标校方法示意图
(1)
式中,P1为接收天线口面处功率;P2为频谱仪或功率计读出功率;G为接收天线增益;A为射频电缆衰减。
通过调整射频源功率基准以及配装输出端衰减器,使得接收天线口面处的功率P1与射频源设置的功率值P0接近一致,并使射频源工作在线性区,具有最大的动态范围。
3.4仿真测试系统联调
仿真测试系统各个节点在指挥控制系统的控制下,完成全系统的联调测试,确认全系统工作状态正常,具备开展仿真测试的条件。
3.5被测导引头进场及安装架设
仿真测试系统准备就绪后,可安排导引头进场进行安装架设。导引头安装完毕并检查导引头各线缆连接后,用控制台控制导引头开机,利用频谱仪在目标模拟系统的信号输入端测量导引头输出的射频信号功率,依据测得值配置衰减器,使得目标模拟系统输入的信号功率在系统的工作范围之内,以便获得最佳信号质量。此后,利用目标模拟系统发出典型目标,用控制台控制导引头开机,如果导引头能够正常捕捉跟踪目标,则系统对接成功,可进一步开展试验。
3.6开展仿真测试
试验时,首先进行灵敏度、方位搜索范围、距离搜索范围等不需要仿真测试系统全回路参与的项目,后进行跟踪精度、分辨力等需要全回路参与的项目,按照试验方案中的试验方法逐一开展。
3.7数据处理及结果报告编写
对照试验记录,筛选出有效测试数据,综合利用各种工具软件进行数据处理后,得出测试结论,编写数据处理报告及测试结果报告。
4测试内容及方法
相比导引头鉴定试验,当导引头作为参试品,需要对其技术状态进行确认时,并非是对导引头战技指标的全面测试,重点也不是检验其性能是否符合研制任务书规定的指标要求。其目的是测试与试验应用密切相关的指标是否能够满足试验需求,重点是摸清导引头的实际性能,为试验结果评定提供依据。测试的内容主要包括灵敏度、方位搜索/跟踪范围、距离搜索/跟踪范围、方位/距离跟踪精度、角度/距离分辨力等。
为便于测试方法的描述,假设被测试导引头航战灵敏度指标为S,天线增益为A,天线俯仰角为-θ,方位搜索范围指标为±φ1,方位跟踪范围指标为±φ2,距离搜索范围指标为Ds1~Ds2,距离跟踪范围指标为Dr1~Dr2。
4.1灵敏度测试
选取典型距离和方位,构设不同功率的目标回波,控制导引头开机搜索,找到导引头能够捕获跟踪的最小目标回波功率。
控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;目标模拟系统设置一批方位:0°,距离:15 km的目标,功率值首先设置为:P0=S-A;控制导引头开机搜索,记录导引头对目标的捕捉跟踪状态;如果导引头未能捕获跟踪目标,则设置目标功率值在上一次的基础上+1dBm;如果导引头能够捕获跟踪目标,则设置目标功率值在上一次的基础上-1dBm;控制导引头重新搜索,记录导引头对目标的捕捉跟踪状态;直至找到使导引头能够稳定跟踪的最小目标功率值Ps,则导引头灵敏度实测值为S=Ps+A。
4.2方位搜索范围测试
在导引头方位搜索范围的左(右)极限指标值附近,设置典型目标,控制导引头开机搜索,逐步改变目标方位,导引头刚好能够捕获跟踪目标的最大方位即为导引头搜索范围的左(右)极限。
控制试验转台位置为:偏航:-φ1,俯仰:θ,滚动:0°;雷达射频环境模拟器设置一批方位:0°,距离:15km,功率:>S-A(dBm)的目标(确保导引头能够稳定跟踪);控制导引头开机搜索,记录导引头对目标的捕捉跟踪状态以及输出的目标方位信息;如果导引头未能捕获跟踪目标,则控制试验转台偏航在上一次的基础上+1°;如果导引头能够捕获跟踪目标,则控制试验转台偏航在上一次的基础上-1°;控制导引头重新搜索,记录导引头对目标的捕捉跟踪状态以及输出的目标方位信息;直至找到导引头能够捕捉跟踪的目标最大方位角即为导引头搜索范围的左极限。用同样的方法测试得到导引头搜索范围的右极限。
4.3方位跟踪范围测试
在导引头处于跟踪状态时,逐渐增大弹目视线角,直至导引头输出方位信息不再随弹目视线角变化而发生变化或跟踪丢失。试验时,结合对静止目标方位跟踪精度试验进行。
4.4对静止目标方位跟踪精度测试
选取典型距离,构设不同方位的单一典型目标,测试导引头对静止目标的方位跟踪精度。
控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;目标模拟系统设置一批方位:0°,距离:15 km,功率:>S-A(dBm)的目标;控制导引头开机搜索;观察导引头输出数据稳定后,控制试验转台偏航+1°;重复上一步骤,直至导引头输出方位值达到最大值(方位值不再随试验转台偏航值增大而增大);此时导引头输出的方位值即为方位跟踪范围的右极限,试验过程中记录的试验转台偏航值即为目标方位真值,导引头输出的方位信息为测量值,通过二者之差计算跟踪精度。用同样的方法测试得到方位跟踪的左极限以及左侧的跟踪精度。
4.5对运动目标方位跟踪精度测试
选取典型距离,构设横向运动的单一典型目标,测试导引头对运动目标的方位跟踪精度。试验时,可将目标静止,通过试验转台的运动来相对模拟目标的运动。
控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;目标模拟系统设置一批方位:0°,距离:15km,功率:>S-A(dBm)的目标;控制导引头开机搜索;待导引头稳定跟踪目标后,控制试验转台以角速度ω按照0°→φ2+2(°)→-φ2-2(°)→0°的顺序运动。试验过程中记录的试验转台偏航值即为目标方位真值,同时刻导引头输出的方位信息为测量值,通过计算二者之间误差的均值和方差得到跟踪精度。
4.6距离搜索范围测试
在导引头距离搜索范围的下限和上限附近,以一定的距离步进设置典型目标,逐个距离控制导引头开机搜索,直至找到导引头能够捕获跟踪目标距离的上、下限。
控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;目标模拟系统设置一批方位:0°,功率:>S-A(dBm)的目标,距离首先设置为:DS1-1(km);控制导引头开机搜索;如果导引头未能捕获跟踪目标,则控制目标模拟系统将目标距离在上一次的基础上+1km;如果导引头能够捕获跟踪目标,则控制目标模拟系统将目标距离在上一次的基础上-1km,重新控制导引头开机搜索;重复上一步骤,并逐步减小目标距离改变的步进值,直至找到导引头能够捕捉跟踪的目标最小距离值(下限)。用同样的方法测试得到导引头距离搜索范围的上限。
4.7距离跟踪范围测试
在导引头处于跟踪状态时,逐渐增大(减小)弹目距离,直至导引头输出距离信息不再随弹目距离变化而发生变化或跟踪丢失。试验时,结合对运动目标距离跟踪精度试验进行。
4.8对静止目标距离跟踪精度测试
选取典型方位,构设不同距离的单一典型目标,测试导引头对静止目标的距离跟踪精度。
控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;目标模拟系统设置一批方位:0°,功率:>S-A(dBm)的目标,距离首先设置为:DS1;控制导引头开机搜索;观察导引头输出数据稳定后,控制目标模拟系统目标距离+1km(也可根据需要取0.5km);重复上一步骤,直至导引头输出距离值达到最大值(距离值不再随目标距离值增大而增大或跟踪丢失);目标模拟系统设置的目标距离值为目标距离真值,导引头输出距离信息为测量值,通过二者之差计算跟踪精度。
4.9对运动目标距离跟踪精度测试
选取典型方位,构设径向运动的单一典型目标,测试导引头对运动目标的距离跟踪精度。
指挥控制系统设置一批方位0°,RCS均值为3000m2的径向匀速直线运动目标,速度:300m/s,初始距离:DT2/2+5(km),运动的方向相对于导弹为由远及近,运动距离为DT2/2+5(km);控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;指挥控制系统控制仿真试验开始,执行上述试验态势;当导引头输出距离不随弹目距离变化而发生变化或跟踪丢失时,控制试验结束,此时导引头输出的距离信息即为距离跟踪下限。试验态势中的弹目距离即为真值,导引头输出距离信息为测量值,根据二者之差计算距离跟踪精度。
改变目标初始距离为:DT2/2-5(km),运动的方向相对于导弹为由近及远,运动距离为DT2/2+10(km),再次进行仿真试验;当导引头输出距离不随弹目距离变化而发生变化或跟踪丢失时,控制试验结束,此时导引头输出的距离信息即为距离跟踪上限。运动目标方位/距离跟踪精度试验态势示意图如图3所示。

图3 运动目标方位/距离跟踪精度试验态势示意图
4.10角度分辨力测试
设置不同方位逐渐分离(或靠拢)的两个典型目标,测试导引头能够分辨两个目标的最小角度。
指挥控制系统在10km处横向设置两批典型目标,目标RCS均值:3000m2(可适当增大目标一RCS,使得导引头首先跟踪目标一);目标一保持方位角为0°,目标二从12°位置以30m/s的速度逐渐横向靠近目标一;控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;指挥控制系统控制仿真试验开始,执行上述试验态势;当目标二和目标一位置重合后,控制试验结束。根据记录的导引头输出目标方位信息,导引头的跟踪位置在单个目标与两个目标质心之间跳变时刻两目标相对导引头的夹角可作为导引头角度分辨力。
4.11距离分辨力测试
设置不同距离逐渐接近的两个典型目标,测试导引头能够分辨两个目标的最小距离。
指挥控制系统在导引头作用距离范围内设置两批典型目标,目标RCS均值:3000m2,方位均为0°;目标一保持固定距离10km,目标二从11km处(可依据试验结果适当增大)以20节航速逼近目标一;控制试验转台位置为:偏航:0°,俯仰:θ,滚动:0°;装订导引头决策方式,使导引头在开机后首先跟踪目标二;指挥控制系统控制仿真试验开始,执行上述试验态势;当目标二和目标一位置重合后,控制试验结束。根据记录的导引头输出距离信息,导引头从跟踪目标二跳变至跟踪目标一时,两个目标的间距可作为导引头距离分辨力。角度/距离分辨力试验态势示意图如图4所示。

图4 角度/距离分辨力试验态势示意图
5结束语
本文详细阐述了开展雷达导引头技术状态认定的基本流程和方法,可为开展相关工作提供指导。该方法主要针对于单平面非相参雷达导引头,双平面以及相参雷达导引头可参照使用。同时,测试方法对于导引头基本性能的试验鉴定也具有较高的参考价值,下一步可开展对试验流程的自动控制研究,增强测试的自动化程度。
参考文献
[1]李星.反舰导弹复杂攻防对抗仿真系统实现[D].国防科学技术大学,2012.
[2]季鑫源,刘建成.雷达侦察装备注入式半实物仿真试验方法研究[J].舰船电子对抗,2013,36(6):73-77.
[3]李兴民,曲长文,李国君.雷达分辨率仿真试验方法研究[J].现代雷达,2007,29(2):89-92.
[4]张公学,应朝龙.末制导雷达检测接口标准化初探[J].宇航计测技术,2005,25(3):45-48.
[5]郑璞,汤广富,赵宏钟,等.反舰雷达导引头射频暗室抗干扰信号模拟方法[J].导弹与航天运载技术,2009,(4):52-57.
Research on Simulation Test Method for Radar Seeker Status Confirming
Xu Hai,Cui Lianhu
(91336 unit of the PLA,Qinhuangdao 066326,Hebei,China)
Abstract:Aiming at the requirement of equipment support in ECM test,the index to be confirmed while the radar seeker is as the cooperating equipment is analyzed.The method and step of index test for anti-ship radar seeker by using HWIL test system are introduced.Taking the full advantage of state under control,high precision and high effect-cost by using simulation test,the problems of radar seeker status confirming before using in the test are solved.
Keywords:radar seeker;anti-ship missile;simulation test;HWIL
[收稿日期]2016-03-07
[作者简介]徐海(1978—),男,辽宁新民人,大学本科,现从事导弹制导仿真专业。
中图分类号:TN974
文献标识码:B
doi:10.3969/j.issn.1674-3407.2016.01.005
