一种独轮车机器人的动力学建模及俯仰平衡控制
2016-06-23刘成举何淑通
庄 未 刘成举 江 汉 何淑通
桂林电子科技大学,桂林,541004
一种独轮车机器人的动力学建模及俯仰平衡控制
庄未刘成举江汉何淑通
桂林电子科技大学,桂林,541004
摘要:针对一台3驱动独轮车机器人系统,分析了其动力学特性并给出了一种可以实现其前后俯仰平衡运动的控制方法。根据行走轮与地面接触的非完整约束特性,引入Chaplygin方程建立系统的动力学模型,结果发现独轮车机器人是一个具有6个独立广义速度、3个欠驱动自由度的欠驱动系统。考虑车体俯仰平衡运动的力学子系统,采用部分反馈线性化方法,将其中的欠驱动车体俯仰角线性化,并选择车体俯仰角和行走轮转动角为输出,设计了系统俯仰平衡运动的非线性控制器。最后通过数值仿真控制与物理样机实验验证了所设计控制器的有效性。
关键词:独轮车机器人;动力学模型;俯仰平衡运动;部分反馈线性化
0引言
独轮车机器人是一种依靠“独轮”接地、静态不稳定但动态可稳定的道路行走机构,因其轻便灵活、节能环保而受到人们的广泛关注。
目前,人们对独轮车机器人的研究主要集中在机构设计、动力学建模、平衡控制策略制订三个方面。文献[1]设计了一种用轮子、支架和转盘构成的独轮车机器人机构。该机构采用线性LQR(linearquadraticregulator)方法实现机器人前后方向的平衡,但由于研究中忽略了系统的状态耦合,其控制器的鲁棒性尚待提高。文献[2]对文献[1]的控制方法进行了改进,提出了LQG(linearquadraticGaussian)的控制思路,实现了独轮车机器人全方位的稳定控制。然而,文献[2]的工作是在小偏航角的前提下进行的,此时车体侧向和前向的耦合很小,动态模型可以简单地线性化,这与机器人的实际工况尚有差距。文献[3]设计了一款在车架上安装两个闭环机构的独轮车机器人系统。这种机器人具有很强的平衡能力,但结构复杂且两个闭环机构需要同时驱动,因此控制难度较高。文献[4]提出了一种橄榄球轮形的独轮车机器人。该机器人的驱动轮设计成橄榄球形状,增大了横滚调节范围,降低了侧向平衡控制难度。另外,该机器人可左右摆动车身上体部分来调整机器人重心偏移,以此对机器人进行航向控制。文献[5]利用陀螺原理设计了一种单轮式机器人系统——Gyrover,引起了大量学者的兴趣[6-11]。类似地,文献[12]也提出了一种用双陀螺调节侧向平衡的独轮车机器人机构,并研究了鲁棒增益等控制策略,很好地解决了倾角过大时机器人不可控的问题。利用旋转陀螺产生的进动力可以使机器人达到较好的平衡效果,但这类机器人高速旋转陀螺会消耗大量额外的能量,这是机器人节能设计所不希望的。文献[13]设计了一种行走机构为万向滚动球的独轮机构。该机构的侧向平衡、俯仰平衡与航向控制均可通过控制“球轮”实现。文献[14]基于倒立摆原理设计了一款名为Unibot的独轮车机器人。Unibot车身上部的惯性轮可以为机器人提供侧向调整激励,其车身下部的独轮则可以为机器人俯仰平衡提供驱动,遗憾的是该机器人没有设计航向控制机构。文献[15]报道了一款能够骑独轮车的机器人“村田婉童”,“村田婉童”的结构原理与Unibot类似,其设计者在控制上忽略前后与侧向动力学耦合影响,因此其平衡能力有待进一步提高。文献[16]提出一种可调质量块的独轮车机器人系统。其研究者认为,左右移动质量块来改变机器人质心的位置,由此可以产生足够的重力矩抵消倾倒力矩对机器人的影响。对于实际效果,该文献仅给出了数值仿真控制验证,缺乏物理样机实验的支撑。文献[17]设计了一种通过向两侧喷气实现侧向平衡的独轮车机器人系统。显然,这种机器人首先需要解决气源、噪声等问题,另外,这种设计还需要对喷气这一复杂的动态过程进行建模,这也会增大控制的难度。文献[18-21]研究一种惯性摆轮独轮车机器人系统,该系统采用双闭环PID控制、线性二次型最优控制、迭代学习控制和滑模控制等控制方法对独轮车机器人进行平衡控制研究。文献[22]提出了一种转动惯量可调的摆轮式独轮车机器人系统,其特点是机器人垂直转子和水平转子上均有三个位置可调的质量块,可以改变转子的转动惯量。文献[18-21]和文献[22]设计的独轮车机器人均达到了一定的平衡效果。
综上所述,目前独轮车机器人的机构设计形式较为多样,先后出现了单轮式Gyrover机器人、橄榄球轮式机器人、球轮式机器人和垂直摆轮式机器人等。其中,垂直摆轮式独轮车机器人的两个转动轮转轴相互正交,弱化了侧向倾角与俯仰角的力学耦合,在一定程度上降低了控制难度。另外,建立准确简洁的力学模型和设计高效可靠的运动控制器是众多独轮车机器人研究人员共同关注的焦点。
本文以一台具有行走轮、腰轮和摆轮3个驱动输入的垂直摆轮式独轮车机器人为研究对象,利用Chaplygin方程建立了机器人在水平地面上行走的数学模型,从而揭示了行走轮、腰轮和摆轮调整平衡和控制航向的力学机理,然后采用部分反馈线性化技术设计了俯仰平衡控制器,最后在数值仿真和样机实验两个方面实现了机器人的俯仰平衡运动控制。
1动力学建模
1.1运动学分析
如图1所示,本文研究的垂直摆轮式独轮车机器人系统由车架1、行走独轮2、腰轮3和摆轮4构成。
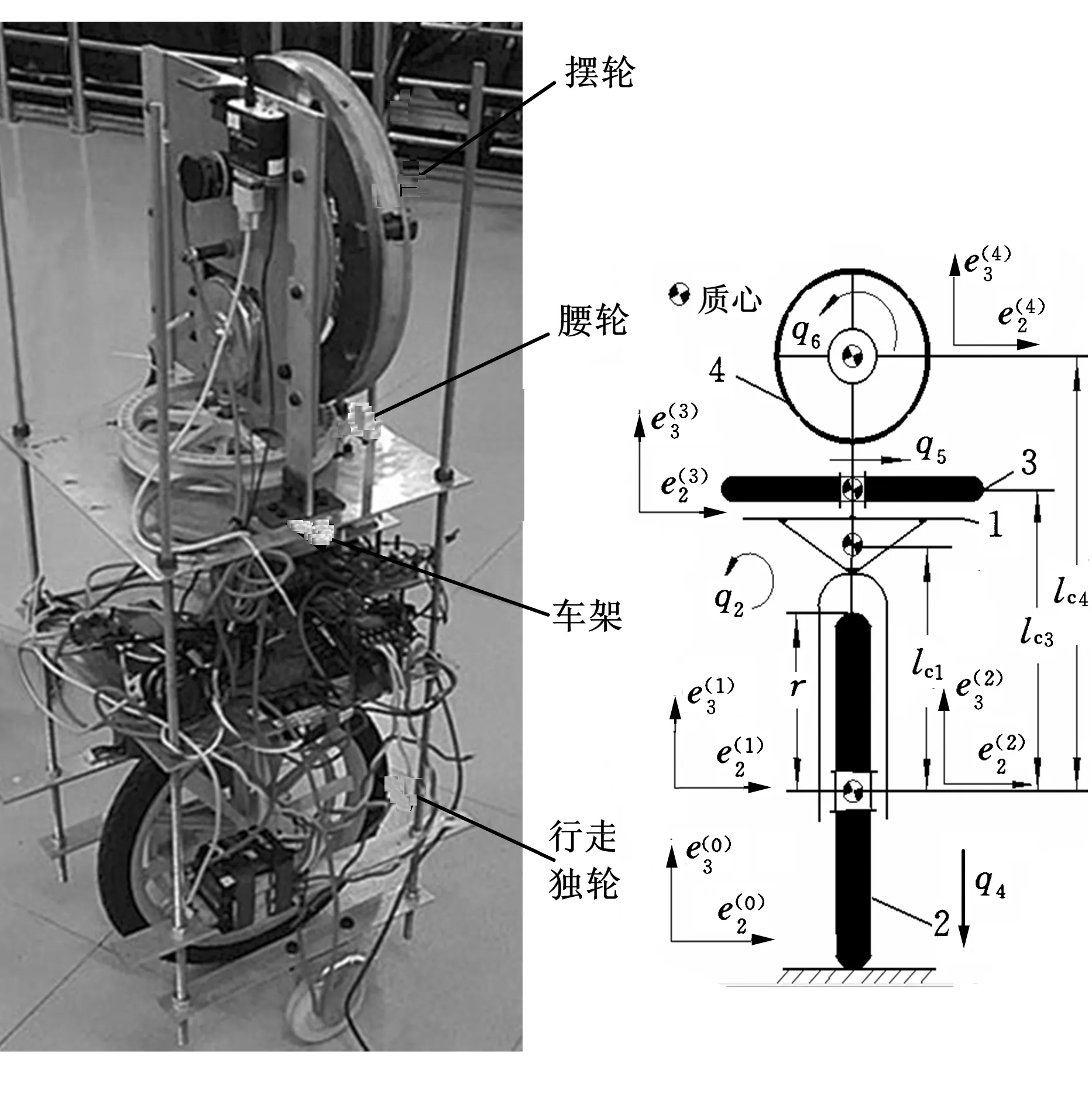
(a)物理样机(b)结构简图图1 驱动独轮车机器人系统

独轮车机器人力学系统的位形需要用9个广义坐标来确定,分别为车架的3个欧拉角ψ、θ、φ(转动序列为e3-e1-e2,定义为q1、q2、q3),行走轮相对车架的转角q4,腰盘相对车架的转角q5,摆盘相对车架的转角q6,坐标系{1}原点在坐标系{0}中的位置x、y、z(定义为q7、q8、q9)。
根据欧拉角旋转序列(e3-e1-e2)的定义,车架的角速度矢量为
(1)

根据相对运动原理行走轮角速度矢量为
(2)

在纯滚动的条件下,行走轮与地面的接触为非完整约束。设车轮接地点的矢径rA为
(3)
式中,r为行走轮的半径。
则接地点的速度vA满足关系式:
(4)
式中,vB2C为行走轮几何中心的线速度。
根据式(4)可以得到:
(5)
另一方面,行走轮几何中心的线速度又可以表示为
(6)
综合式(5)和式(6),得到系统的非完整约束方程:
(7)
(8)
以及系统的完整约束方程:
q9=rc2q2
(9)
由式(7)和式(8)可知,约束是一阶线性齐次稳定的,且约束系数不含q7和q8。
综上可知,系统具有2个非完整约束方程和1个完整约束方程,因此其自由度数是6。
从车架的角速度出发,腰轮、摆轮的角速度矢量可以由以下式子计算:
(10)
(11)
式中,ωB3和ωB4分别为腰轮和摆轮的角速度矢量。

(12)
(13)
(14)
式中,vB3C和vB4C分别为腰轮和摆轮的线速度矢量。
1.2动力学模型
设刚体Bi(i=1,2,3,4)的质量惯性矩阵为
(15)
其中,mi为刚体Bi的质量,I为3×3的单位阵,Ji为刚体Bi的惯性张量矩阵,且
(16)
式中,Jcixx、Jciyy、Jcizz分别为刚体Bi绕其质心坐标系x、y、z轴的转动惯量。
则系统的总动能
(17)

(18)
式中,g为重力加速度。
由式(17)和式(18)可知,动能T和力函数U也均不包含q7和q8,因此q7和q8为循环坐标。

(19)
σ=1,2,…,6

最终可以得到系统的动力学模型:

(20)
G(q)=(0,G2,G3,0,0,0)T
τ=(0,0,0,τ4,τ5,τ6)T
q=(q1,q2,q3,q4,q5,q6)T

由式(20)知,独轮车机器人为一个6自由度的欠驱动系统,其中车架的3个欧拉角没有直接驱动。
2控制方案
2.1控制器设计
本文探讨的是独轮车机器人的俯仰平衡运动控制问题,即如何在锁定车体的航向角和侧向倾角的情况下控制系统的前后俯仰平衡。
分析式(20)给出的系统动力学模型,假设:
(21)
则通过控制行走轮可以实现机器人的前后俯仰平衡。具体做法如下:

(22)
其中,Di j和Ci j分别为矩阵D和C的元素,且
(23)
(24)
利用部分反馈线性化方法设计控制器。因为D34≠0,因此由式(22)第一个方程可以解出
(25)
将式(25)代入式(22)中第二个方程,得到
(26)
引入虚拟控制量υ,取控制力矩
(27)
则式(22)可以改写为
(28)
若选取虚拟控制量
(29)



(30)
y=Ce
(31)
e=[e1e2e3e4]T

2.2稳定性证明
式(30)在平衡点(e=0)的Jacobin矩阵为
(32)
此时式(32)的特征方程为
s4+(kd-k2w2)s3+(kp-k1w2)s2+
k2w1s+k1w1=0
(33)
根据Routh判据,式(30)稳定的条件是
(34)
由以上分析可知,选择适当的参数k*可以使式(34)成立,从而使系统(式(28)~式(31))状态及输出能够稳定。
类似地,在独轮车机器人的侧向平衡控制中(锁定车体的航向角和俯仰角),分析式(20)给出的系统动力学模型,假设:
i=1,3,4,5
(35)

3数值仿真控制实验
设初始时刻,车架俯仰角为5°,系统的质量、转动惯量、长度等参数设置如表1所示。

表1 独轮车机器人系统仿真参数
根据控制器稳定的条件(式(34)),选取控制器参数:kp=550,kd=10,k1=6,k2=2。将有关的参数代入式(33),求解得到复根:
显然,这些复根全部具有负实部,因此系统稳定。
对式(30)、式(31)进行数值仿真,时间步长设为0.01s,仿真时间为10s。结果如图2~图4所示。
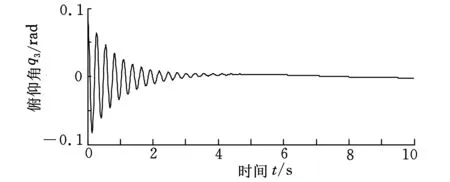
图2 车架俯仰角(仿真结果)

图3 行走轮角速度(仿真结果)
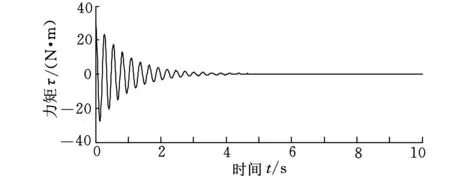
图4 行走轮电机的驱动力矩(仿真结果)
从图2可以看出,车架俯仰角由初始值快速地振荡衰减,大约经过5s收敛到零位置附近。从图3可以看出,行走轮的速度也缓慢减小,同样在5s后也能基本收敛为0。从图4可以看出,电机的调整力矩最大值达到28N·m,但随时间变化呈指数衰减,大约在5s也收敛为0。由此不难得出结论,控制方案((式(27)和(式(29))实现了独轮车机器人的俯仰平衡运动。
4物理样机实验
4.1实验样机系统简介
独轮车机器人样机如图1a所示。样机控制硬件平台以数字信号处理器(DSP)为核心,包括惯性测量单元、光电编码器、电流传感器以及ZigBee通信模块。图5为样机控制系统硬件结构框图。

图5 独轮车机器人控制系统硬件结构框图
4.2实验与结果分析
实验前,在样机两侧安装辅助轮以确保机器人俯仰运动自由但又不会侧向倾倒。选取控制器参数kp=450,kd=15,k1=4,k2=1.5,实验结果如图6~图9所示。

图6 俯仰平衡行走运动实验视频连拍

图7 车架俯仰角(实验结果)

图8 行走轮角速度(实验结果)

图9 行走轮电机的驱动力矩(实验结果)

综上所述,独轮车机器人样机在控制器的作用下实现了在水平地面上的俯仰平衡行走,并且电机的调整能力(速度、力矩)均有一定的阈度,因此可以进一步优化控制器参数,提高系统的响应性能。
5结语
独轮车机器人的“行走独轮”与地面在理想情况下为纯滚动接触,这种接触形式具有明显的非完整约束特性。本文根据这一特征建立了系统在水平地面上运动的力学模型,有效地揭示了独轮车机器人行走轮、腰轮和摆轮的运动激励与车体俯仰角、航向角和横滚角的动力学耦合关系。研究了单独考虑车体的前后俯仰运动,通过对力学模型进行降维处理成功地提取出了一个能够描述俯仰平衡运动力学行为的子系统。采用部分反馈线性化方法,将子系统中的欠驱动车体俯仰角线性化,并选择车体的俯仰角和行走轮的转动角为输出设计了俯仰运动的平衡控制器。数值仿真控制以及物理样机实验均证明了本文动力学分析和平衡控制器设计的有效性。
参考文献:
[1]SchoonwinkelA.DesignandTestofaComputerStabilizedUnicycle[D].Standford:StanfordUniversity,1987.
[2]VosDW.NonlinearControlofanAutonomousUnicycleRobot:PracticalIssues[D].Cambridge:MIT,1992.
[3]ShengZaiquan,YamafujiK.PosturalStabilityofaHumanRidingaUnicycleandItsEmulationbyaRobot[J].IEEETransactionsonRoboticsandAutomation,1997,13:709-720.
[4]HaY,YutaS.TrajectoryTrackingControlforNavigationofSelf-containedMobileInversePendulum[C]//Proc.ofthe1994IEEE/RSJInt.Conf.onIntelligentRobotsandSystems.Munich,1994:1875-1882.
[5]BrownHB,XuY.ASingle-wheelGyroscopicallyStabilizedRobot[C]//Proceedingsofthe1996IEEEInternationalConferenceonRoboticsandAutomation.Minncapolis,Minnesota,1996:3658-3663.
[6]XuY,AuKW,NandyGC,etal.AnalysisofActuationandDynamicBalancingforaSingleWheelRobot[C]//Proceedingsofthe1998IEEE/RSJInt.Conf.onIntelligentRobotsandSystems.Victoria,1789-1794.
[7]GoraC.NandyIT,XuY.DynamicModelofaGroscopicWheel[C]//Proceedingsofthe1998IEEEInternationalConferenceonRobotics&Automation.Leuven,Belgium,1998:1683-2688.
[8]OuYongsheng,XuYangsheng.BalanceControlofaSingleWheelRobot[C]//Proceedingsofthe2002IEEE/RSJInt.ConferenceonIntelligentRobotsandSystem.Lausane,Switzerland,2002:2043-2048.
[9]SalehT,HannYH,ZhuZ,etal.DesignofaGyroscopicallyStabilizedSingle-wheelRobot[C]//IEEEInternationalConferenceonRobotics,AutomationanMechatronics,RAM2004.Singapore,2004:904-908.
[10]MamunA,ZhuZ,VadakkepatP,etal.TrackingControloftheGyrobots:aGyroscopically-stabilizedSingle-wheeledRobot[C]//The31stAnnualConferenceoftheIEEEIndustrialElectronicsSociety,IECON05.Raleigh,NorthCarolina,USA,2005:1839-1844.
[11]ZhenZ,AbdullahAM,PrahladV,etal.LineTrackingoftheGyrobot—AGyroscopicallyStabilizedSingle-wheeledRobot[C]//Proceedingsofthe2006IEEEInternationalConferenceonRoboticsandBiomimetics.Kunming,2006:293-298.
[12]DaoMQ,LiuKZ.Gain-scheduledStabilizationControlofaUnicycleRobot[J].JSMEInternationalJournal,2005, 48(4):649-656.
[13]LauwersTB,KantorGA,HollisRL.ADynamicallyStableSingleWheeledMobileRobotwithInverseMouse-ballDrive[C]//Proceedingofthe2006IEEEInternationalConferenceonRoboticsandAutomation,Orlando,Florida,2006:2884-2889.
[14]deCallafonRA.UCSDJacobs.SchoolofEngineering[EB/OL]. [2015-03-03].http://maeresearch.ucsd.edu/callafon/research/index.html#PROJECTS.
[15]丛秋波. 村田制造所:“村田顽童”携手“村田婉童”展示高新技术[J]. 电子设计技术,2008(12):124-125.
CongQiubo.MurataManufacture:“MurataBoy”HandinHand“MurataTong”ExhibitionofHigh-tech[J].ElectronicDesignTechnology,2008(12):124-125.
[16]郭磊,廖启征,魏世明,等.独轮车机器人的动力学建模与非线性控制[J].系统仿真学报,2009,21(9):2730-2733.
GuoLei,LiaoQizheng,WeiShiming,etal.DynamicalModelingandNonlinearControlofUnicycleRobot[J].JournalofSystemSimulation,2009,21(9):2730-2733.
[17]LeeJH,ShinHJ,LeeSJ,etal.NovelAirBlowingControlforBalancingaUnicycleRobot[J].IntelligentRobotsandSystems,2010,2529-2530.
[18]朱晓庆,阮晓钢,魏若岩.基于惯性飞轮的独轮自平衡机器人侧向动力学分析[J].应用力学学报,2013,30(3):395-400.
ZhuXiaoqing,RuanXiaogang,WeiRuoyan.LateralDynamicAnalysisofSelf-balanceSingleWheelRobotBasedonFlywheel[J].JournalofAppliedMechanics,2013,30(3):395-400.
[19]阮晓钢,胡敬敏, 王启源,等.一种独轮车机器人的滑模控制[J]. 控制工程, 2011,18(1):128-132.
RuanXiaogang,HuJingmin,WangQiyuan,etal.Sliding-modeControlofaUnicycleRobot[J].ControlEngineering,2011,18(1):128-132.
[20]朱晓庆, 阮晓钢,魏若岩, 等. 独轮机器人侧向通道建模与控制[J].北京工业大学学报,2013,39(10):1474-1480.
ZhuXiaoqing,RuanXiaogang,WeiRuoyan,etal.LateralDynamicModelingandControlofaSingleWheelRobot[J].JournalofBeijingUniversityofTechnology,2013,39(10): 1474-1480.
[21]王启源,阮晓钢.独轮自平衡机器人双闭环非线性PID控制[J].控制与决策,2013,27(4):593-597.
WangQiyuan,RuanXiaogang.DualLoopNonlinearPIDControlofSingle-wheeledRobot[J].ControlandDecisionMaking,2013,27(4):593-597.
[22]白占欣.六自由度独轮机器人本体研制及动力学控制方法研究[D].哈尔滨:哈尔滨工业大学,2011.
(编辑王艳丽)
DynamicsModelandBalancedPitchingControlofaUnicycleRobot
ZhuangWeiLiuChengjuJiangHanHeShutongGuilinUniversityofElectronicTechnology,Guilin,Guangxi,541004
Abstract:Dynamics of a three driven joints’ unicycle robot and controller to achieve the robot’s balanced pitching motion were disscused herein.Firstly,considering the coholonomic constrain between the running wheel and the ground,a dynamics model for the unicycle robot was established by using Chaplygin equation.The model reveals there are 6 generalized velocities and 3 underactuated freedoms in the robot system. Secondly,focusing on the dynamics subsystem of the robot's balanced pitching motion, and a controller for this kind of motion was developed. The controller was based on the partial feedback linearization method, which linearized the underactuated pitching angle,and took the pitching angle and the rotating angle of the running wheel as outputs.The numerical simulation and prototype experiments were performed to testify the validilities of the proposed controller.
Key words:unicycle robot;dynamics model;balanced pitching motion;partial feedback linearization
收稿日期:2015-03-03
基金项目:国家自然科学基金资助项目(51305087);国家级大学生创新创业训练计划资助项目(201510595034);桂林电子科技大学研究生教育创新计划资助项目(YJCXS201511,YJCXS201512)
中图分类号:TP24
DOI:10.3969/j.issn.1004-132X.2016.04.008
作者简介:庄未,女,1977年生。桂林电子科技大学机电工程学院副教授。主要研究方向为机器人动力学及控制技术。刘成举,男,1991年生。桂林电子科技大学机电工程学院硕士研究生。江汉,男,1990年生。桂林电子科技大学机电工程学院硕士研究生。何淑通,男,1990年生。桂林电子科技大学机电工程学院硕士研究生。
