3-RPS柔顺并联机构的构型设计及仿真
2016-06-22周道鸿
李 培,周道鸿
3-RPS柔顺并联机构的构型设计及仿真
李培,周道鸿
摘要:首先根据3-RPS并联机构的结构特点设计3-RPS型柔顺并联机构;其次运用RecurDyn软件仿真出动平台及三条支链的运动形态,并绘制出支链上各个铰链的速度-时间、位移-时间曲线;最后得出结论:每个铰链的速度和位移均随时间变化,并且变化范围均很小,最后趋于稳定,为柔顺并联机构的运动学研究提供帮助。
关键词:并联机构;柔顺并联机构;RecurDyn
与并联机构相比,柔顺并联机构[1]作为利用自身柔性连接杆件以及各铰链的弹性变形将力、运动或能量进行转换的一种新型免装配机构,其避免了各运动副之间的装配误差及间隙对末端平台运动特性所造成的影响;在空间内具有多自由度的运动特性。国内外的许多学者将柔性机构相关理论与并联机构理论相结合,对空间柔顺并联机构进行了深入的研究。1983年Hunt提出3-RPS型并联机构的构型和相关理论,并得出该机构实现2R1T的运动,并在工业中得到广泛应用;Lee将该机构应用于微动机器人;黄真等[2]于1996年根据螺旋理论探究了该机构的运动学特征,建立了运动学及动力学模型,之后设计出多种3自由度的立方角平台机构,如3-CS机构,3-PRS机构,3-RRS机构,3-TPT机构,3-PSP机构,3-RRRH机构,3-RRRP机构及3-RRC机构等。之后,黄真等人首次研制了一种以柔性铰链代替常规铰链的六自由度柔性并联机构。清华大学的吴鹰飞利用蠕动的运动原理设计了具有三自由度运动的微动平台。江西理工大学的江涛和朱大昌[3]分析了一种三平移柔性并联微动精密定位平台。
目前,柔顺并联机构的研究大致分为以下三个方面:
(1)在并联机构的基础上建立柔顺并联机构[4],但刚性体和柔性体之间存在差异。另外,在建模过程中对模型作了一系列的简化,至今还没有一种理论模型能够精确描述柔性机构的性能,柔性机构的理论建模还有待进一步研究。
(2)采用有限元[5]方法进行理论公式的验证或者修正有其局限性。有限元分析[6]中,柔性铰链是处于一种理想化的状态,其结构尺寸精度和表面粗糙度都是在理想化条件下进行计算分析,所以其分析结果也存在一定的局限性。
(3)通过对柔性机构的精度分析,柔性铰链的加工精度决定了整个机构的最终精度,而现有的加工方法很难消除加工误差。做出实际模型进行试验分析,结合理论建模、有限元技术和实验手段对微动柔性机构开发出一种新的参数化建模方法无论从理论上还是实践应用方面都具有十分重要的意义。
本文根据3-RPS并联机构的机构特点设计3-RPS型柔顺并联机构,运用多体仿真软件RecurDyn仿真出动平台及三条支链的运动形态,并绘制出支链上各个铰的速度-时间、位移-时间曲线。得出每个铰链的速度和位移均随时间变化,并且变化范围均很小,最后趋于稳定,为柔顺并联机构的运动学研究提供帮助。
1机构简介以及自由度分析
3-RPS并联机构[7]具有三个相同的支链连接动平台和定平台,每条支链都是由一个转动副(R)、一个移动副(P)和一个球副(S)串联而成。转动副(R)与定平台连接,球副(S)与定平台连接,三条支链对称分布在定平台上。每条支链R副的轴线在定平台上,P副的运动轨迹与R副的轴线垂直,S副的一条轴线与R副的轴线平行,其余两条轴线与之正交。
3-RPS并联机构每条支链上的三个运动副具有5个自由度(球副S具有三个自由度,移动副和转动副分别具有一个自由度),即提供一个约束力且该力通过球副(S)并与转动副(R)平行。3-RPS并联机构具有三条相同的支链,三条支链提供三个力线矢,并且这三个力线矢共面且不汇交。因此约束力线矢所确定的平面内的两个移动自由度和绕此平面法线方向的一个转动自由度被约束,故整个并联机构具有三个自由度,即绕X、Y轴的转动和一个沿着Z轴的移动,3-RPS并联机构运动简图及模型如图1所示。
图13-RPS并联机构运动简图及三维建模
2柔顺并联机构的建立
根据3-RPS并联机构的结构特点,利用Solidworks软件建立3-RPS柔顺并联机构[8]的构型,如图2所示。柔顺并联机构[9]支链,如图2(a)所示,自上而下分别是S副、P副、R副,R副的轴线与P副的轴线垂直,并且与S副的一条轴线平行。因柔顺并联机构每个支链需要一个驱动,故在中间留凹槽装驱动。柔顺并联机构整体结构,如图2(b)所示,是由三条相同的3-RPS支链均布在动平台和定平台上。
3基于RecurDyn的运动仿真
RecurDyn软件[10]采用相对坐标系运动方程理论和完全递归算法,适合求解大规模的多体系统动力学问题,并可以进行实体建模,进行机械动力学分析。在分析机构运动时,精度高、计算速度快,极大的提高了机构设计的可靠度。
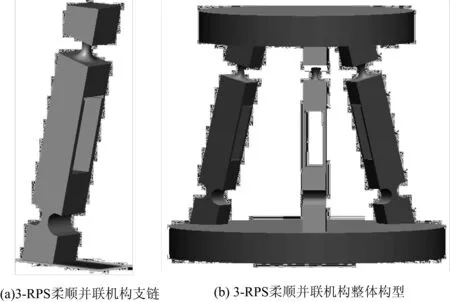
图23-RPS柔顺并联机构支链及整体模型
采用RecurDyn软件对3-RPS柔顺并联机构
进行仿真分析[11],其分析流程图如图3所示。

图3Recurdyn软件仿真流程图
对柔性转动副处理时,分四个步骤[12]进行,即划分网格、PATCH、B.C.(边界约束)和定义材料。柔性移动副的处理和柔性转动副的处理大体相同,但柔顺移动副不需设定边界约束而要增加一个“FDR”来限制P铰的形变量以防止失真。柔性球副的处理更加简单,仅需要划分网格、PATCH和定义材料属性。
在运动副添加时,需要添加五种类型[13],即Fixed(固定副)、Revolution(转动副)、 Tranlate (移动副)、Spherical(球副)、Cmotion(笛卡尔驱动)。每条支链所添加的运动副如表1所示。
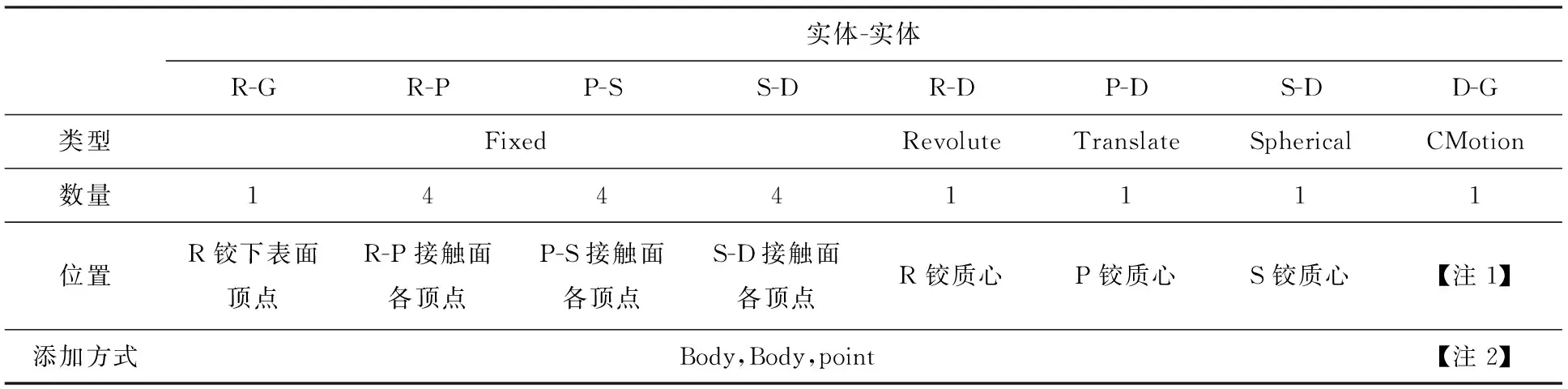
表1 每条支链所需添加的运动副
1、表中R、P、S、D表示:R铰、P铰、S铰、和动平台。2、【注1】表示:CMotion位置为动平台质心和质心正下方20mm处点。3、【注2】表示:CMotion添加方式为Body,Body,point,point。
添加运动副后的模型如图4所示。
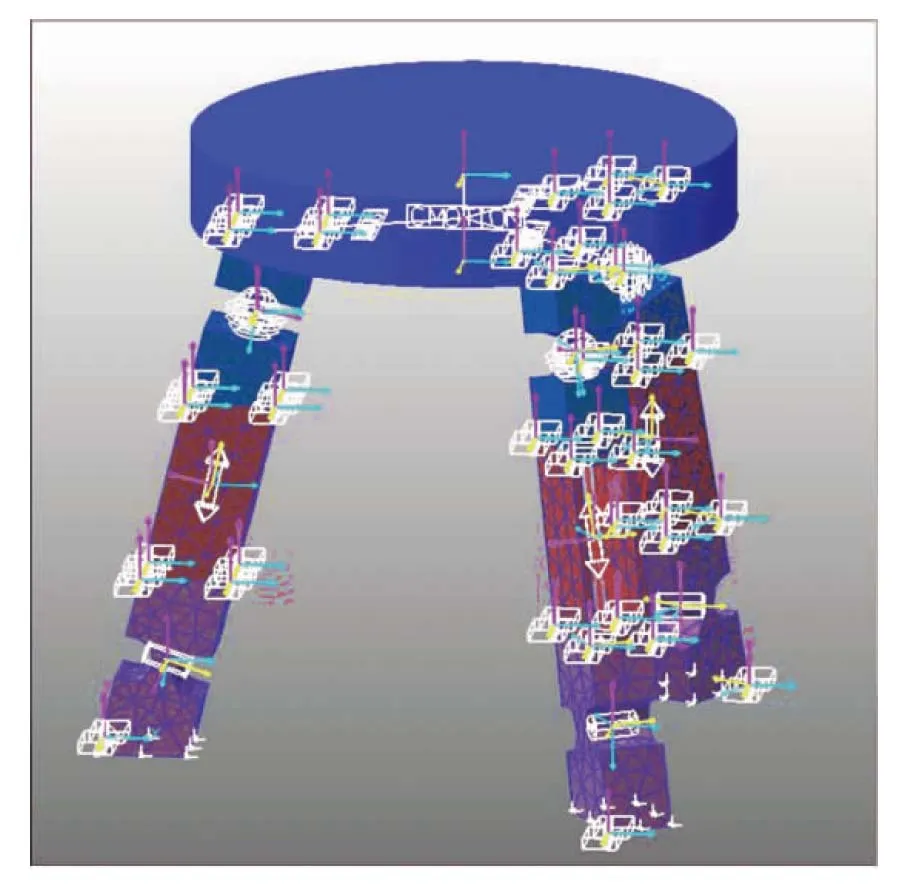
图4完成运动副添加后的3-RPS机构
输出3-RPS全柔顺并联机构的仿真结果,仿真出动平台及三条支链的运动形态,并绘制出支链上各个铰链的速度-时间、位移-时间曲线[14](图5、图6、图7)。
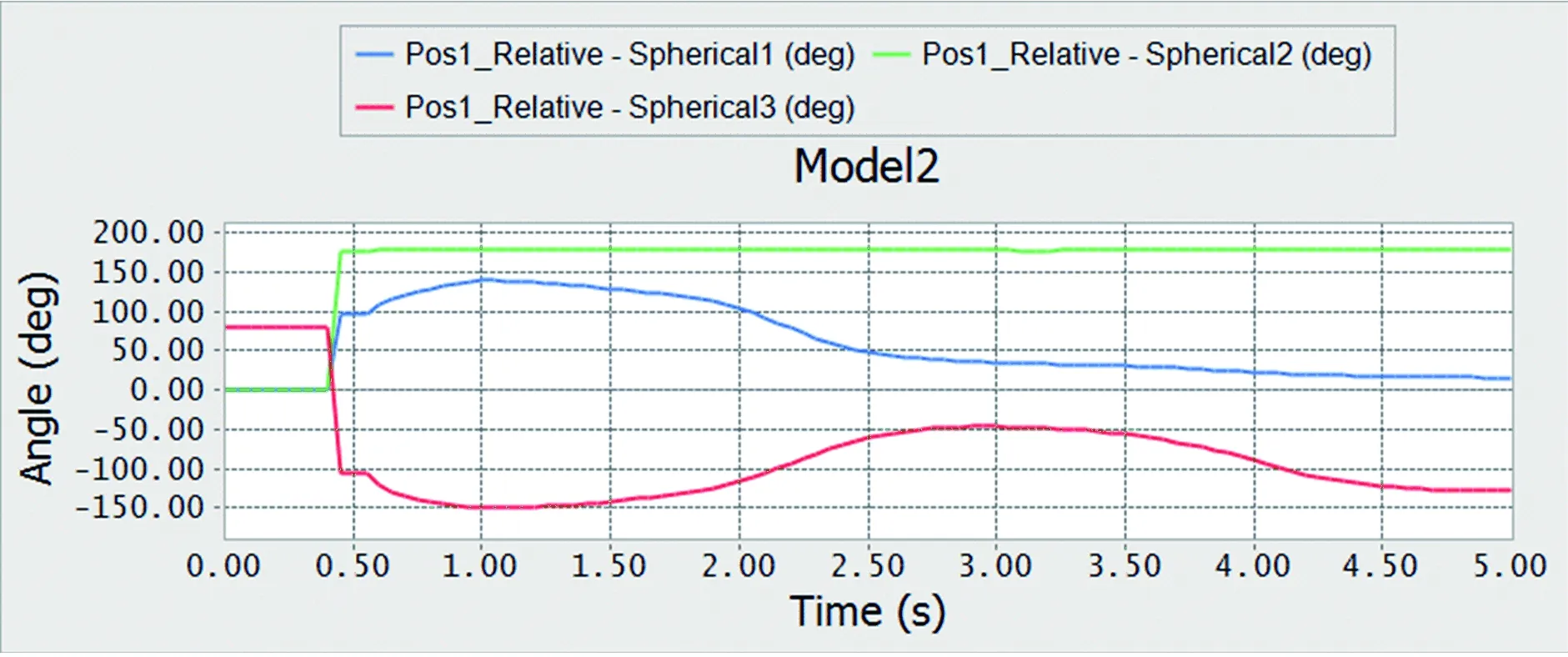
图5在Ex1函数驱动下三条支链上转动副的角度变化图
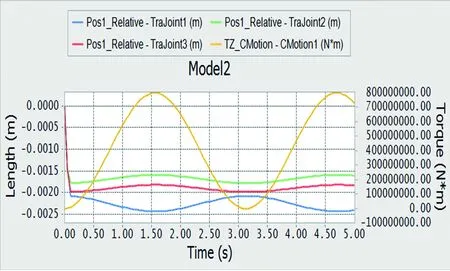
图6在Ex1函数驱动下三条支链上移动副的角度变化图
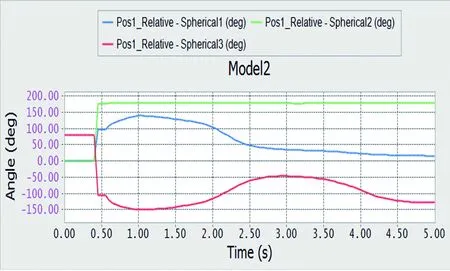
图7在Ex1函数驱动下三条支链上球副的角度变化图
4小结
通过分析得出3-RPS并联机构具有三个自由度,即2转动1平移。在3-RPS并联机构的基础上,利用Solidworks建立3-RPS柔顺并联机构,并在此基础上利用Recurdyn多体软件进行运动仿真,得出3-RPS柔顺并联机构各个铰链的速度-时间、位移-时间曲线。通过分析得出[15]每条支链上的每个铰链均随时间变化,并且变化的范围很小,但最后均趋于稳定。表明柔顺并联机构的稳定很高,并且具有较高的精度,为柔顺并联机构运动学研究提供帮助。
[参考文献]
[1]余跃庆.柔顺机构学[M].北京:高等教育出版社,2007.
[2]黄真,赵永生,赵铁石.高等空间机构学[M].北京:高教出版社,2006.
[3]江涛,朱大昌.空间三平移柔顺并联超精密定位平台设计与分析[J].煤矿机械,2011,32(10):49-52.
[4]王华,张宪民. 整体式空间3自由度精密定位平台的优化设计与试验[J].机械工程学报,2007,43(3): 66-71.
[5]蒋春松,孙浩,朱一林,等.ANSYS有限元分析与工程应用[M].北京:电子工业出版社,2012.
[6]王雯静,余跃庆. 基于有限元法的柔顺机构动力学分析[J].机械工程学报,2010,46(9):79-86.
[7]朱大昌,严智敏,崔祥府,李培.3-RPS并联机器人位置分析及控制仿真[J].有色金属科学与工程,2012,1(3):95-100.
[8]顾起华.基于全柔顺并联机构的空间微动超精密定位平台的研究[D]. 江西理工大学,2012.
[9]朱大昌,李培,崔祥府,严智敏.2RPU-2SPS全柔顺并联机构构型设计及刚度的研究[J].江西理工大学学报,2012.33(5):44-50.
[10]张磊磊.RecurDyn软件在机械设计中的应用[J].设计与分析,2012(6):120-121.
[11]骆请国,司东亚,龚正波,等.基于RecurDyn的履带车辆动力学仿真[J].车辆与动力技术,2011(4):26-28.
[12]亢石磊.基于RecurDyn的带式输送机虚拟样机动态分析[D].太原:太原理工大学,2014.
[13]候敬巍.基于RecurDyn的4自由度液压机器人的动力学建模研究[J].起重运输机械,2011(3):50-53.
[14]朱大昌,崔祥府,严智敏,李培.3-RPC型并联精密定位机构设计与分析[J].有色金属科学与工程, 2012,12(3):100-105.
[15]胡俊峰,张宪民. 3自由度精密定位平台的运动特性和优化设计[J].光学精密工程,2012,20(12):2686-2695.
责任编辑:王与
The Configuration Design and Simulation of the 3-RPS Parallel Mechanism Compliant
Li Pei, Zhou Daohong
Abstract:Firstly, according to structural features of the 3-RPS parallel mechanism, 3-RPS parallel mechanism compliant is designed. Then the movement patterns of platform and three branches are simulated by RecurDyn, and draw the velocity - time, displacement - time curve of each hinge. Finally the results of simulation show that the speed and time of each hinge changes as time changes, and the scope of change is very small, and finally stabilized, which provides the help on the researches of the kinematics of the compliant parallel mechanism.
Key words:parallel mechanism; compliant parallel mechanism; RecurDyn
中图分类号:TH12
文献标识码:A
文章编号:1673-1794(2016)02-0040-04
作者简介:李培,蚌埠学院机械与车辆工程系教师,硕士;周道鸿,蚌埠学院机械与车辆工程系(安徽 蚌埠 233000)。
基金项目:国家自然科学基金项目:基于柔顺机构的智能微操作机器人动力学与控制研究(51265016)
收稿日期:2016-01-15
