人体上肢辅助康复训练设备的开发
2016-06-22戴凤智岳远里白瑞祥
戴凤智,刘 波,岳远里,白瑞祥
(天津科技大学电子信息与自动化学院,天津 300222)
人体上肢辅助康复训练设备的开发
戴凤智,刘 波,岳远里,白瑞祥
(天津科技大学电子信息与自动化学院,天津 300222)
摘 要:开发了能够帮助上肢瘫痪患者逐步恢复上肢运动功能的上肢辅助康复训练设备.通过编写上肢动作组控制该设备模仿正常人体上肢动作,以此带动患者上肢的康复运动.在设计上肢动作时,参考人体医学相关知识和人体生理结构特征,获得上肢运动的极限位置信息,在此基础上进行机械结构设计和选材.控制系统采用高精度、大扭力舵机.实验结果基本符合人体上肢康复运动规律.
关键词:上肢康复;训练器械;安全性;舒适性;康复动作组
中风和偏瘫疾病严重影响患者的生活质量.若不能及时进行康复治疗,可能会导致肌肉废用性萎缩,并对消化系统和心脑血管系统产生不良影响[1].接受康复训练能有效缓解病情,长期坚持肢体训练能取得较好的康复效果[2].
康复运动分为被动运动、按摩运动、助力主动运动、主动运动和抗阻力运动等.通过适当的上肢动作引导和辅助训练,能重新恢复上肢运动功能,增强上肢力量,重新修复受损的运动机能,防止上肢畸形瘫痪和肌肉萎缩.肌肉得到锻炼能加快上肢血液流动,间接增强心脑血管功能,对患者的心理和精神方面也有一定的缓解作用.
清华大学研制的二连杆结构康复训练机器人[3],是通过二连杆在平面的复合运动带动手臂做康复训练,在关节处通过两台伺服电机作为驱动.在不同的康复训练阶段,通过控制二连杆速度和力的大小来满足患者不同阶段的训练要求.但机器人只能对患者进行单臂的简单屈伸运动训练,并且不具有对患者进行局部肌肉震动和按摩的功能,在外观上也容易使患者产生畏惧心理,影响康复效果.
哈尔滨工业大学机器人研究所开发的上肢康复训练机器人[4],主体材料采用硬铝合金,具有可穿戴式结构.患者坐在座椅上能够实现肩部屈伸、外展/内收和肘部屈伸等训练,安全性较高.实验表明该机器人能够对患者上肢进行多关节运动训练.缺点是这种训练是针对关节的屈伸等运动,而不是针对动作组(完成一个连贯动作需要多关节连续合作进行,例如伸臂取水杯并拿到嘴边).
目前已有的康复训练器具,不能很好地控制康复动作组及运动量.并且多数康复设备着重考虑机械结构,整个设备只有很少的自动化系统加入.因此,智能化程度较低.由于肢体康复训练器具开发工作还处于初级阶段,市面上没有质优价廉的成品销售,其在技术性和功能性方面还有很多没有突破的难点,突出表现在安全性能、使用舒适性、轻便性、连续工作时间等几个方面[5-6].
本文设计了人体上肢辅助康复训练设备,并在机械结构、控制系统、动作组设计方面进行了探讨.
1 上肢辅助康复设备的机械设计
1.1人体上肢的运动范围
为让患者在安全和舒适的条件下进行训练,充分考虑了人体上肢的运动极限和运动范围.人体上肢生理结构允许运动的极限角度是:前臂旋外和旋内均为80°~90°.以人体直立手臂下垂为基准,手臂上抬和向后伸展的极限角度分别为170°和40°,水平左右摆动角度为70°和60°.
为了防止在训练过程中发生意外,给患者造成伤害,在进行康复动作组的编制时,留出安全余量范围,保证训练的安全,设定安全角度(不能超过极限角度)范围如下:前臂旋外和旋内角度均为0°~50°;以人体直立手臂下垂为基准,手臂上抬和向后伸展的角度范围分别设定为0°~130°和0°~10°,水平左右摆角均为0°~30°.
机械设计参考了国家标准GB10000—1988[7],符合人体生理结构特点(部分数据见表1).

表1 中国成年人人体尺寸Tab.1 Chinese adult body size
根据标准获得的成年人体上肢各部位的质量、长度与人体身高体质量mt的关系如下:
前臂质量m1=0.018,mt
前臂长度l1=0.146,ht
上臂质量m2=0.035,7,mt上臂长度l2=0.159,ht
1.2机械结构设计
上肢辅助康复设备需要足够的强度,能承受人体手臂的压力和拉力.支架采用强度较高的铝型材[4],在固定人体上肢的部位采用有机玻璃板.有机玻璃板的质量较轻,且强度能够支撑人体手臂的质量.将有机玻璃板弯折一个弧度,该弧度符合人体上肢的生理结构,让手臂在恢复过程中更加舒适,在紧固手臂后使患者没有不适感.外形结构设计成与人体上肢形状类似的外骨骼.设备的上臂和前臂装置设计成分离的结构,便于肘关节的运动.图1所示为上肢辅助康复训练设备的三维设计外形.

图1 上肢辅助康复训练设备的三维设计外形Fig.1 3D design of upper limb rehabilitation training equipment
机械结构设计时考虑到不同患者的情况不同,在连接件上设计出更多的连接孔,使不同患者能够根据需求来调节设备的前臂和上臂长度.在肩部也设计了可调工件,可以进行细微调节.完成粗略调节的机构为一套十字滑台导轨,动力源为步进电机.通过遥控便可以进行自动调节[8].
整个设备固定于座椅之上,占地面积小,并能够给患者更加舒适的体验.在选取零部件时,尽量选用标准件,以使零件更换更为方便.在一些可调零件的设计上,通过调节打孔的间隔和密度来灵活实现尺寸的调节.
上肢辅助康复训练设备的内部结构图和机械结构三视图如图2所示.
综合考虑材料的密度和成本,选用厚度为6,mm 的70系列铝板作为支架,其材质较轻,强度适当,可满足需要.若人体身高1.754,m、体质量71,kg,则人体上肢单条手臂质量m0=3.8,kg,上肢全臂(上臂加前臂)长l=0.586,m[7],选用6,mm厚的铝板可以支撑起人体上肢[4].

图2 上肢辅助康复训练设备的结构图Fig.2 Structure of upper limb rehabilitation training equipment
1.3机械强度校验

为保证设计的安全性,需要进行螺母切应力的计算.设螺栓的剪切力为FR,则剪切强度其中,d0=6,mm为螺栓抗剪面直径.螺栓的许用剪切强度[τ]为3.5~5.0,MPa,应满足τ≤[τ].
设F为每个M4螺母所受螺栓剪切力,h= 19,mm为螺钉到旋心的距离,取重力加速度g= 9.8,m/s2,则
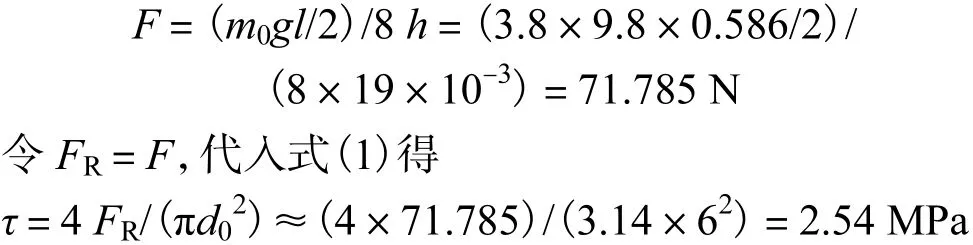
满足τ≤[τ].
2 上肢辅助康复设备的控制系统
控制系统的主控制器采用stm32系列ARM芯片.在动作组的控制和执行上使用舵机控制板,通过调节占空比来精确控制舵机转动的角度.
提前在舵机控制板内存储若干套预先编排的动作.当舵机控制板与主控芯片STM32F103RBT6通信时,能按照患者的需求调取存储的康复训练程序.在上肢康复设备的背部设置有按键,患者家属或医生也可以依照康复需要为患者选择不同的康复运动模式.
上肢辅助康复系统配备液晶显示设备,能够将当前的运动模式、运动量等信息显示出来,还能显示康复训练时间的长短和康复动作组的选择,便于患者本人和家属清楚康复状况,也使医护人员能够更好地了解当前的运动状态,以便为患者合理地安排康复运动组以及训练的时间和强度.
上肢辅助康复设备还具有超限报警功能.由于占空比调节输出时有可能占空比过大而导致舵机转动角度偏大,如果超出人体上肢的运动范围就会发生事故.根据人体上肢医学数据,在机械设计和程序中预先设定好人体上肢运动的角度范围.如果在康复过程中设备将要超过限定数据时会由角度传感器监测到这一变化,会反馈到主控芯片并触发报警系统来阻止这一动作,使之保持在安全范围内,防止对患者造成伤害.
为达到训练强度和恢复效果,采用大扭力舵机(ASMC-02系列舵机)带动人体上肢进行康复运动.在电源方面选择大功率多电压输出的开关电源作为设备电源.这样,在满足电机的电压要求同时,可使电机有足够能量带动上肢运动,又能满足芯片的安全电压要求.
3 上肢辅助康复设备的动作组设计
人体肩关节的运动是通过手臂的运动实现的.要设计出合理的肩关节康复训练方案,就要对人体手臂的运动方式进行处理.根据人体解剖学理论的人体方位图如图3所示.
人体垂直站立,垂直地面且通过人体的轴称为垂直轴,通过人体的前后方向且与垂直轴垂直的轴称为矢状轴(纵轴),通过人体且与以上两轴都垂直的轴称为冠状轴(横轴).
人体解剖学把人体分为3个平面:
(1)水平面(横切面),是与地面平行且穿过矢状轴和冠状轴的平面,其将人体分为上、下两部分;
(2)冠状面(额状面),是与矢状轴垂直且穿过冠状轴和垂直轴的平面,其将人体分为前、后两部分;
(3)矢状面(纵切面),是与冠状轴垂直且穿过矢状轴和垂直轴的平面,其将人体分为左、右两部分.
人体解剖学定义肩关节的运动方式有3种:
(1)屈伸运动,为手臂在矢状面上绕冠状轴运动,向前为屈,向后为伸;
(2)外展、内收运动,为手臂在冠状面上绕矢状轴运动,远离躯干为外展,靠近躯干为内收;
(3)外旋、内旋运动,为手臂在水平面上绕垂直轴运动,远离躯干为外旋,靠近躯干为内旋.

图3 人体方位图Fig.3 Human orientation
上肢的运动按照运动的自由度可分为2类:
(1)单关节运动,即只进行单一关节的训练,如肘关节的弯曲和伸展运动.这是在康复训练的初期或者为了提高特定肌群的力量所采用的训练方式.运动方式单一,但目的性较强,可用于增强神经系统对特定动作的印象,促进神经功能的快速康复.
(2)复合运动,在关节肌肉中,多关节肌占多数,所以必须进行复合运动训练.通过复合运动可以锻炼肌肉的运动协调能力,以及对多种肌肉群的控制能力.复合运动主要采用基于特定任务的方式实现,如拿水杯喝水.一系列动作必须通过多关节的复合运动才能实现.在训练时,因为要经历长时间多次尝试与失败,从心理上要给予患者积极的配合,提高患者康复的信心.进行复合运动时必须非常小心,避免肌肉损伤.
上肢辅助康复设备的运动必须设计成能够复现正常人体上肢各种运动的状态,以此带动患者上肢肌肉的收缩与舒张[9].将这种训练设计成不同的动作组.动作组由不同的运动模式(水平运动模式、竖直运动模式和伸展运动模式)组成.不同模式锻炼不同的肌肉组织群,让康复效果更好[10].部分动作姿态如图4所示.

图4 部分动作姿态Fig.4 Partial action pose
4 实 验
上肢辅助康复训练设备实物见图5,利用其进行实验.

图5 上肢辅助康复训练设备的实物图Fig.5 Physical map of upper limb rehabilitation training equipment
4.1实验样本
实验在天津科技大学机械工程学院人体仿生学实验室进行.随机选取大一至大三学生共16人(8名男性,8名女性)作为实验样本.所有受试者均为身体健康、无运动系统病史的正常成年人,并在实验人员的指导下认真阅读了本次实验方案,表示愿意接受实验.受试者基本情况见表2.

表2 受试者的基本情况Tab.2 Human subjects
实验内容包括空载运行、单臂上肢牵引运动和双臂上肢牵引运动:
(1)空载运行,为设备在无患者使用的状态下进行无负载运动轨迹和动作测试;
(2)单臂上肢牵引运动实验,为受试者坐在实验椅上,将一只手臂固定在设备上进行实验;
(3)双臂上肢牵引运动实验,为受试者坐在实验椅上,将两只手臂固定在设备上同时进行实验.
用于分析的实验数据主要有:实验中舵机的运行状况(是否发生异常抖动等)、液晶显示和报警设备(用于运动角度的监测)是否正常以及受试者的实验感受等.
4.2实验步骤
在空载运行时,通过观察设备在运动过程中的抖动情况和转动速度来查找程序设计的不足之处.在空载时观察舵机在转动的过程中是否有明显的震动,同时观察报警器的状态.在做空载双臂同时测试时,还要使康复动作组兼顾左右两臂运动的对称性.
在单臂上肢牵引运动实验时,将受试者的左臂和右臂轮流固定在上肢辅助康复设备的左臂或右臂上进行运动测试.记录下受试者的整体感觉和手臂运动时的感受,观察舵机的运动状况和报警器的状态.
在双臂上肢牵引运动实验时,将受试者的双臂分别固定在上肢辅助康复设备的左右臂上进行实验,并且在不同的运动模式间进行切换,询问受试者的感受及观察舵机的运动状况和报警器的状态.同时,还要观察设备左右两臂的运动是否对称.
4.3实验结果
在空载运动状态下,舵机转动角度正常,无明显震动.但开始时,左右动作有些不对称,通过程序调整解决了该问题.
在单臂和双臂的上肢牵引运动实验中,得到表3所示的数据(其他未列出的测试数据均为正常).
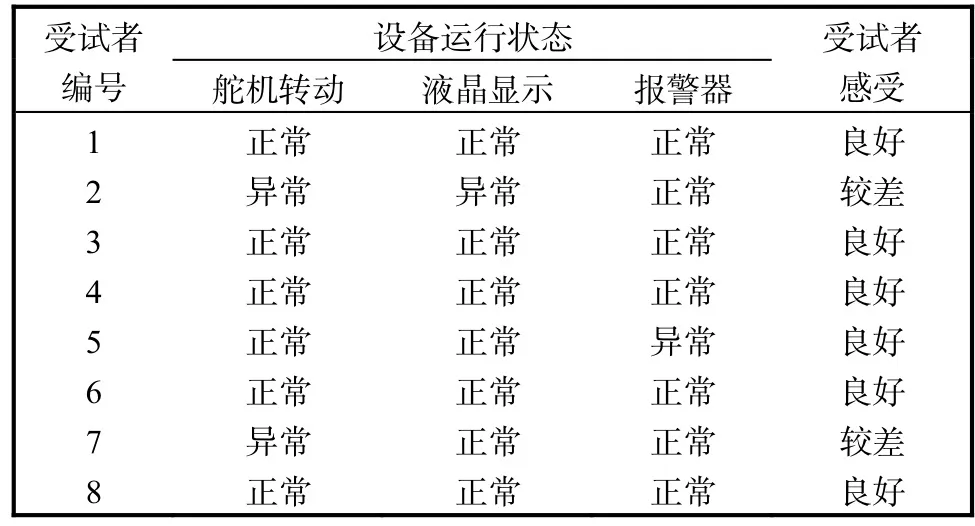
表3 设备运行状态Tab.3 Experimental result
表3中有4处出现异常.其中2号受试者和7号受试者出现的是舵机转动异常,后经查明是由于程序中占空比设置不合理造成的.改变设置后再无震动现象发生(由震动造成了受试者较差的感受).2号受试者的液晶显示出错也是由舵机震动引起的,舵机不再震动之后液晶显示也没有再出现异常.5号受试者的蜂鸣器异常报警是由电路连接不稳定引起的,对电路重新连接固定后没有再出现异常.
5 结 语
本文根据人体医学数据、结合对实验数据的统计分析、通过设计具有可调性的机械结构、搭建电路和控制系统,设计了上肢辅助康复训练设备.利用预先设计的康复动作组,在选择模式后可实施动作康复,并可将康复信息实时显示在液晶显示屏上.
该设备能够在一定程度上代替康复理疗师对患者的康复按摩,实现上肢运动康复的效果.同时,也考虑到占地面积小、易移动、轻便的特点,康复设备以座椅为依托,零部件尽量采用标准件,从而降低了制作成本,电压采用24,V安全电压,使用安全可靠.
通过对健康人体的上肢牵引运动实验,验证了设备的机械设计和控制系统的安全性、可靠性及舒适性.根据受试者的体验报告和实验中各舵机转角以及角速度等信息,对机械装置和控制程序进一步调整后,设备和各动作组的编排更加符合人体上肢生理运动规律.
下一步将应用该设备,对上肢功能障碍患者进行实际的康复训练,并根据训练数据进行设备的改进.参考文献:
[1] 朱镛连,王瑞华,方定华. 神经康复学[M]. 北京:人民军医出版社,2001.
[2] 杨明. 肘关节康复训练装置研究[D]. 武汉:华中科技大学,2008.
[3] 胡宇川,季林红. 从医学角度探讨偏瘫上肢康复训练机器人的设计[J]. 中国临床康复,2004(34):7754-7756.
[4] 李庆玲,孙立宁. 基于sEMG信号的外骨骼式机器人上肢康复系统研究[D]. 哈尔滨:哈尔滨工业大学,2009.
[5] Wang H S,Liu Y H,Zhou D X. Adaptive visual servoing using point and line features with an uncalibrated eye-inhand camera [J]. IEEE Transaction on Robotics,2008,24(4):843-857.
[6] 蔡峰. 肩关节康复训练机器人的设计与研究[D]. 大连:大连交通大学,2012.
[7] 国家技术监督局. GB 10000—1988 中国成年人人体尺寸[S]. 北京:中国标准出版社,1988.
[8] Guo D Q,Ju H,Yao Y Q. Research of manipulator motion planning algorithm based on vision [C]//Proceedings of the 6th International Conference on Fuzzy Systems and Knowledge Discovery. Piscataway:IEEE,2009:420-425.
[9] 金智妍,刘丽娟. 脑卒中偏瘫病人的康复护理[J]. 临床护理杂志,2006(2):74-76.
[10] 李巧云. 偏瘫病人肩关节的康复护理[J]. 长治医学院学报,2000,14(1):67-68.
责任编辑:常涛
Development of Human Upper Limb Rehabilitation Training Equipment
DAI Fengzhi,LIU Bo,YUE Yuanli,BAI Ruixiang
(College of Electronic Information and Automation,Tianjin University of Science & Technology,Tianjin 300222,China)
Abstract:An upper limb rehabilitation training equipment was designed to help upper limb paralyzed patients progressively regain their upper limb moving ability.By programming the upper limb action sets,the training equipment is controlled to imitate the normal human upper limb movement,so that the patient could be trained for upper limb rehabilitation.The equipment is based on the knowledge related to physical medicine and the features of human physiological structure,and the region of human upper limb motion was tested for safety.After the material was selected and the mechanical structure was designed,highly accuracy high-torque steering motors were used for control.The result of the experiment shows that the motion of the rehabilitation training equipment is well in accordance with the laws of human upper limb movement.
Key words:upper limb rehabilitation;training equipment;safety;comfort;rehabilitation action set
中图分类号:TH69
文献标志码:A
文章编号:1672-6510(2016)02-0057-05
收稿日期:2015-05-20;修回日期:2015-09-14
基金项目:天津科技大学科学研究基金资助项目(20130123)
作者简介:戴凤智(1971—),男,天津人,副教授,daifz@tust.edu.cn.
DOI:10.13364/j.issn.1672-6510.20150064
