异步电动机SVPWM变频调速控制系统的研究
2016-06-21江苏省徐州技师学院
江苏省徐州技师学院 陈 斌
异步电动机SVPWM变频调速控制系统的研究
江苏省徐州技师学院 陈 斌
【摘要】本文介绍了电压空间矢量脉宽调制(SVPWM)原理,设计了基于SVPWM的变频调速矢量控制系统,在Matlab/simulink环境下建立了系统仿真模型,并进行仿真研究,仿真结果证明,该系统具有良好的稳、动态性能和抗干扰性能,易于实现。
【关键词】异步电机;SVPWM;变频调速;仿真
0 引言
近年来由于交流电动机矢量变换控制技术以及单片微型计算机的发展应用,使得交流调速的性能获得极大的提高,在许多方面已经可以取代直流调速系统,特别是各类通用变频器的出现,使交流调速已逐渐成为电气传动中的主流。转子磁场定向矢量控制是日前高性能异步电机调速系统普遍采用的方法,电压空间矢量脉宽调制(SVPWM)控制技术是其核心技术,SVPWM控制技术是将逆变器与电动机当做一个整体看待,目的是交流电动机获取幅值恒定的圆形旋转磁场,从而产生恒定的电磁转矩,它的优点是运行噪声低、转矩脉动幅度小、直流电压利用率高。
本文在详细分析SVPWM原理的基础上,设计了基于SVPWM控制技术的异步电动机变频调速矢量控制系统,通过Matlab仿真结果显示,该变频调速系统在负载发生变化时抗干扰性能强,并且其动态及稳态性能良好。
1 电压空间矢量脉宽调制(SVPWM)原理





逆变器的不同开关模式对应不同的基本电压空间矢量,交替使用不同的电压空间矢量就可以合成所需的圆形旋转磁链。三相电压型逆变器(如图1)的开关元件组合为空间的27个电压矢量,如果对三相电压进行变换,根据空间矢量理论,输出电压矢量定义为:

可以得到如图2所示空间开关矢量图[2]。根据矢量关系的线性组合,可取得更多电压空间矢量,以此来获取近似交流电动机所需的圆形磁场。在实际调速控制系统中,为使电压波形对称,减小转矩脉动,将电压矢量的作用时间都一分为二,在满足最小开关损耗原则的前提下,利用电压空间矢量生成SVPWM波,获得接近理想的圆形旋转磁场。
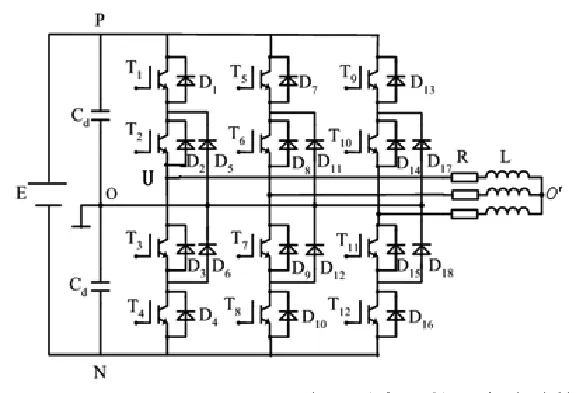
图1 三电平逆变器的主电路结构图

图2 六角形空间电压相量图
2 SVPWM变频调速矢量控制系统设计
转子磁场定向矢量控制是日前高性能异步电机拖动系统普遍采用的方法,SVPWM控制技术是其核心技术,它是将逆变器与电动机当做一个整体看待,目的是交流电动机获取幅值恒定的圆形旋转磁场,从而产生恒定的电磁转矩,它的优点是运行噪声低、转矩脉动幅度小、直流电压利用率高[3]。
图3所示交流异步电机矢量变频调速控制系统结构图,其采用的控制方法是空间电压矢量调制。其总的控制思想是:与从测速发电机测得的电动机的实际转速进行对比,再通过比例积分调节器PI得到电流。电流与通过旋转坐标变换得到的电流分量相比较,通过PI调节器得到Vsqref。定子电流的励磁分量给定值与相比较,再通过比例积分调节器PI得到Vsqref。Vsdref,Vsqref经过Park逆变换得到Vsaref,Vsbref。将得到的Vsaref,Vsbref信号作为SVPWM的输入信号,逆变器受SVPWM准确控制,从而获得优良的调速控制性能。
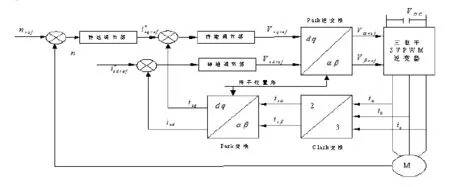
图3 交流异步电机矢量变频调速控制系统结构图(SVPWM)
3 系统仿真实现
图4是在Matlab/simulink环境下建立的基于SVPWM的异步电机变频调速矢量控制系统的仿真模型。
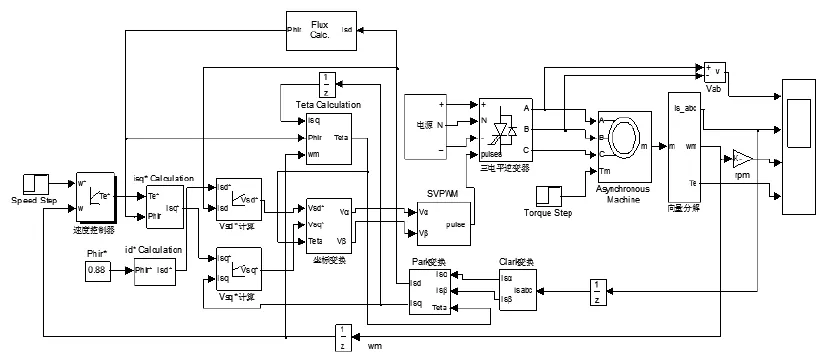
图4 基于SVPWM的变频调速矢量控制系统仿真模型
为了验证该系统实际性能,控制系统仿真模型对异步电机的几种典型的工况进行仿真实验,仿真的基本参数设置如下:
三相异步电机的参数:额定功率:2.2KW;定子电压:380V;频率:50Hz;定子电阻:3.435Ω;定子电感:8.0mH;定子磁通:0.6Wb;转子电阻:5.816Ω;转子电感:5.0mH;定转子互感:200.3mH;转动惯量:0.089kgm2。
直流侧参数:C1=C2=4700μF,Ed1=Ed2=200V。
3.1 系统扰动性能
图5和图6分别表示应用SVPWM优化算法对异步电机进行控制时,定子电流、电机转速、电机转矩在电机转速为1000rpm的情况下,突加、突减负载(负载转矩0→200N•m)的动态响应曲线。

图5 突加负载时定子电流、电机转速、电机转矩的响应曲线(1000rpm)

图6 突减负载时定子电流、电机转速、电机转矩的响应曲线(1000rpm)
从仿真结果可以看出,本系统在电机高速运行负载扰动的情况下,定子电流在负载突变时有明显的变化,随后在较短的时间内达到稳定状态,而转速的变化微弱;电磁转矩响应速度快;具有较高的抗负载扰动能力。
3.2 系统调速性能
图7所示被控电动机转速从300rpm→-300rpm变化,空载状态下,转向发生改变时定子电流、电机转速、电机转矩的动态响应曲线。

图7 转速从300rpm→-300rpm变向时定子电流、电机转速、电机转矩的响应曲线
如图7所示的仿真波形表示,该调速系统在调节器参数不变且空载状态时,改变电动机转向,定子相电流、电机转速及电机转矩的动态响应特性。此时,调速系统处于低速运行,随着摩擦力的减少和限幅作用的消失,超调减少,过渡加快,而电机转矩在t=1.2s时由正变负经过渡后达到稳定。因此可以得出当定子电流在速度变化一定时,其响应速度以及电机转速得以改变。
4 结论
本文探讨了基于SVPWM变频调速矢量控制系统,给出了控制器的设计结构,并进行了仿真研究,结果表明该系统具有良好的稳、动态性能和抗扰动性能,易于数字化实现。因此,应用价值广泛,在工业应用领域中有很好的推广前景。
参考文献
[1]陈伯时.电力拖动自动控制系统[M].北京∶机械工业出版社,2003.
[2]李明,马小平,陈爱丽.一种改进的三电压矢量PWM过调制技术的应用与研究[J].东南大学学报(自然科学版),2003,33∶179-182.
[3]谭国俊,张旭隆,曹言敬,李广超.基于DSP的异步电动机SVPWM变频调速系统的设计[J].工矿自动化,2003.
作者简介:
陈斌(1980—),男,江苏徐州人,硕士研究生,江苏省徐州技师学院讲师,研究方向:交直流调速控制系统。