基于连续图像的无人平台载荷目标定位算法研究
2016-06-17刘俊涛代长勇严晞隽北京宇航系统工程研究所北京100076
刘俊涛 代长勇 严晞隽(北京宇航系统工程研究所,北京 100076)
基于连续图像的无人平台载荷目标定位算法研究
刘俊涛代长勇严晞隽
(北京宇航系统工程研究所,北京 100076)
摘要介绍了基于连续图像的无人平台载荷目标定位的原理和算法,给出了定位过程中不同坐标系下目标的位置和坐标转换的过程,并在此基础上对影响目标定位误差的因素进行了分析。
关键词连续图像,无人平台载荷,目标定位
引 言
无人平台由于具有体积小、重量轻、机动灵活、隐蔽性强、不会造成人员伤亡等优点,在现代战争中发挥着愈来愈重要的作用。同时,无人平台也可以应用在应急搜救、灾情监测、治安监控、地质勘察、资源勘探、海岸缉私和电力巡线等领域,在军用和民用领域均具有非常广阔的应用前景。而在上述相关应用中,基于无人平台光电载荷的目标定位是成功应用的关键。目前常用的基于无人平台光电载荷定位方法通常依赖于激光载荷对目标的测距数据,但在很多应用场景下,无法对光电载荷图像中所有目标点的距离进行激光测距。本文提出了一种基于连续图像的无人平台载荷目标定位的算法,可在没有激光测距数据支持的情况下,进行目标的实时定位,大幅拓展了无人平台的应用空间。
1 目标定位算法
1.1坐标系的定义
应用无人平台光电载荷进行目标定位,主要涉及大地坐标系、大地直角坐标系、无人平台坐标系,以及光电载荷坐标系等坐标系间的转换。
大地坐标系:即WGS-84世界大地坐标系。其坐标原点是地球质心,Z轴指向BIH1984.0定义的协议地级(CTP)方向,X轴指向BIH1984.0定义的零度子午面和CTP赤道的交点,Y轴和Z轴、X轴构成右手坐标系。
大地直角坐标系:原点位于地球质心;Z轴指向地球北极;X轴由原点指向格林尼治子午面与赤道交点;Y轴垂直XOZ平面,与Z轴、X轴共同组成右手坐标系。
无人平台坐标系:为北东地(NED)坐标系,将无人平台看作质点,无人平台位置(B,L,H)为地理坐标系的原点,X轴指向正北方向,Z轴为无人平台到地平面的垂线,Y轴与Z轴和X轴组合起来构成的右手坐标系,称为地理坐标系。
光电载荷坐标系:原点位于摄像机光轴与摄像机镜头平面的交点,X轴定义为指向目标物体时摄像机光轴的方向,当X轴处于水平方向时,Z轴指向天顶方向,Y轴与Z轴和X轴共同组成右手坐标系。
1.2大地坐标系与大地直角坐标系的转换
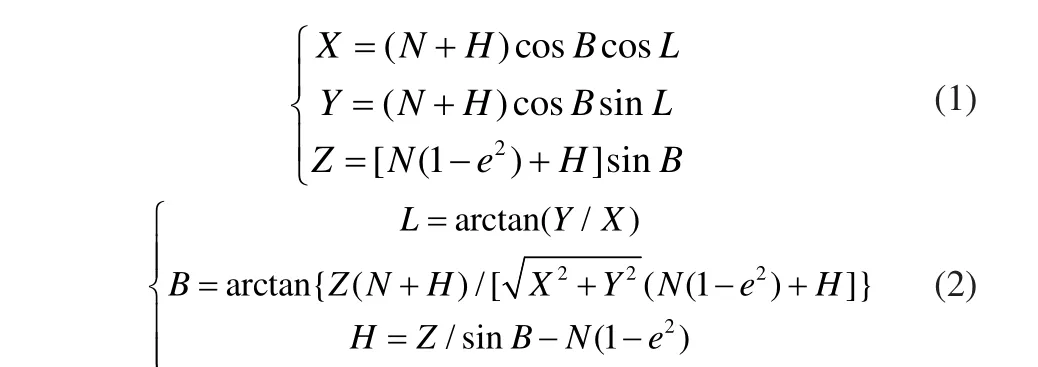
由于无人平台利用GPS获得的是经纬度和高程信息,因此,需要通过坐标转换转换到大地直角坐标系下,大地坐标系(B,L,H)和大地直角坐标系(X,Y,Z)间的转换公式为:,N为该点的卯酉圈曲率半径;e2=(a2-b2)/a2,a、b、e分别为该大地坐标系对应参考椭球的长半轴、短半轴和第一偏心率。
1.3基于连续图像的距离测量
如图1所示,无人平台光电载荷连续两幅图像移动的位移为T,距离P点分别为R1、R2,P点在图像上距离光电载荷光轴的距离分别为Χ1、Χ2,光轴与水平方向夹角为γ,设经过识别算法得到目标在图像中的像素位置坐标为(u,v)(以图像中心为坐标原点,u为列坐标,v为行坐标),则有:
式中:

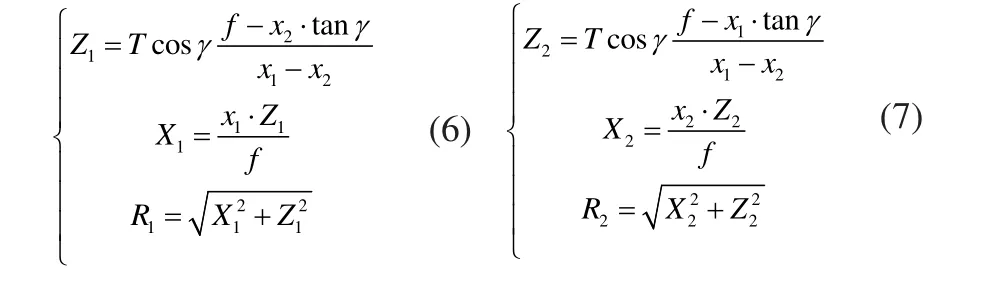
根据图2,得到以下几何关系:
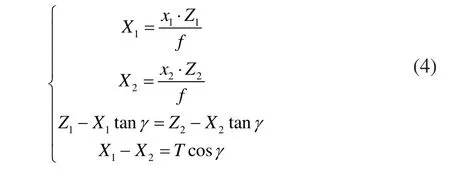
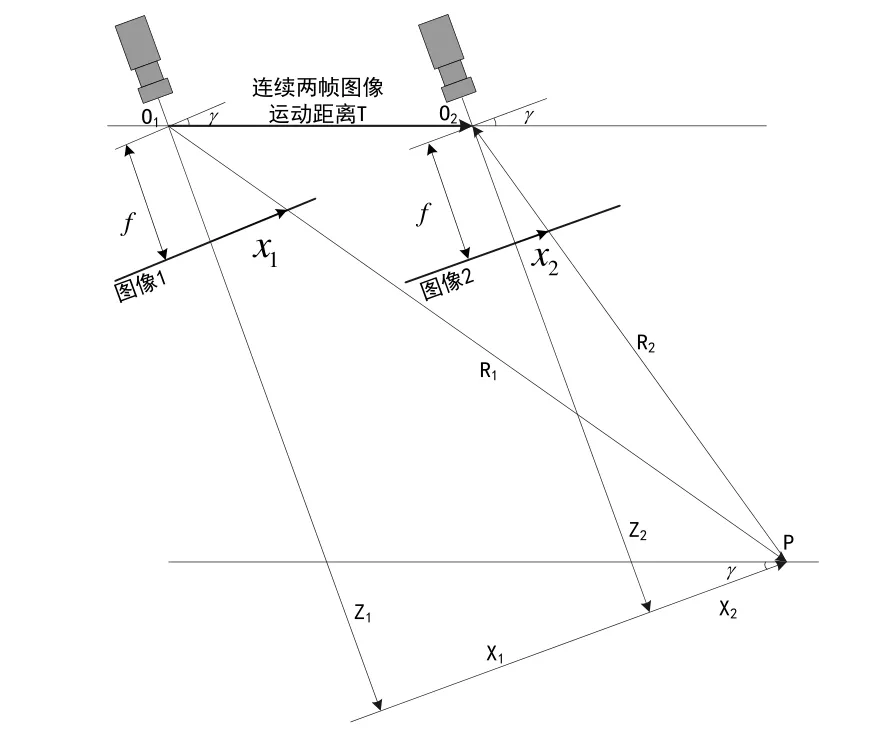
图1 连续图像载荷与目标的位置关系
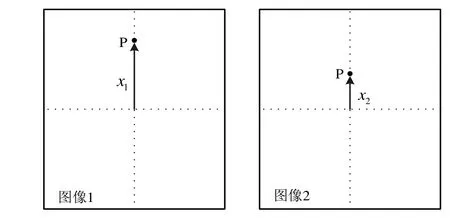
图2 连续图像中目标的成像
可以得到关于Z1、Z2的方程如下:

由此可得,目标距离光电载荷的距离R1、R2如下:
1.4目标在光电载荷坐标系下的坐标
光电载荷坐标系下的目标位置关系如图3所示。设经过识别算法得到目标在图像中的像素位置坐标为(u,v)(以图像中心为坐标原点,u为列坐标,v为行坐标),摄像机焦距为f(um),像元尺寸为s(um),则可计算出目标偏离摄像机光轴的角度(光电载荷坐标系下)分别为:

其中,Φimage为方位角,φimage为俯仰角。根据光电载荷的俯仰角和方位角,得到目标在无人平台坐标系下的方位和俯仰角分别为:

其中,φuav、Φuav为光电载荷观测图像上某点时的俯仰角和方位角;φplatform、Φplatform为光电载荷本身的俯仰角和方位角。
采用齐次坐标表示目标的三维坐标,其优点是方便描述各坐标间的变换关系。目标在三维空间的坐标为A=[a b c]T,则其齐次坐标可以用A=[a b c 1]T来表示。
光电载荷和目标间的距离为R,根据光电载荷坐标系的定义,则目标在光电载荷坐标系下的坐标A1=[x1y1z11]T为:
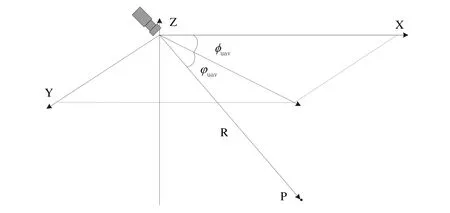
图3 载荷坐标系下目标位置关系

1.5目标在无人平台坐标系下的坐标
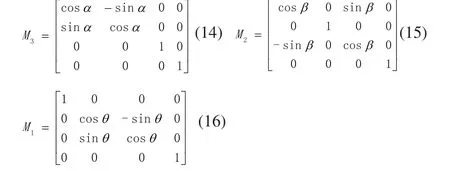
已知无人平台的三轴姿态角(偏航角α,俯仰角β,横滚角θ),进行姿态校正后,目标在无人平台坐标系的齐次坐标为:

其中:
1.6目标在大地直角坐标系下的坐标
设根据公式转换(1)转换后得到无人平台在大地直角坐标系下的坐标为Auav=[xuavyuavzuav0]T,则可以计算出目标在大地直角坐标系下的位置坐标为:

其中:

其中,L0、B0和H0为无人平台GPS经度、维度和高程。综合以上公式得:

然后根据式(2)转换为大地坐标系,可估算得到目标的经纬度信息。
2 误差分析
由前面计算公式可知,目标在大地坐标系下的大地经度(L)、大地维度(B)和大地高(H)是参数(R、α、β、θ、ψplatform、φplatform、L0、B0、H0)的函数,而R是(u、v、f、T、γ)的函数,也就是说光电载荷对目标的定位误差取决于(α、β、θ、ψplatform、φplatform、L0、B0、H0、u、v、f、T、γ)各量的测量误差。
2.1相关参数误差的影响
图4、图5和图6分别给出了在其它误差因素不变的情况下,目标的定位精度随载机的姿态(偏航、俯仰和横滚角)误差带来的目标定位误差的变化情况。
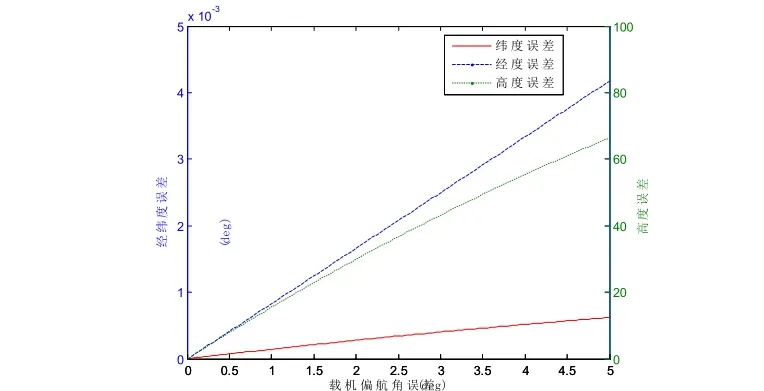
图4 载机偏航角误差带来的定位误差
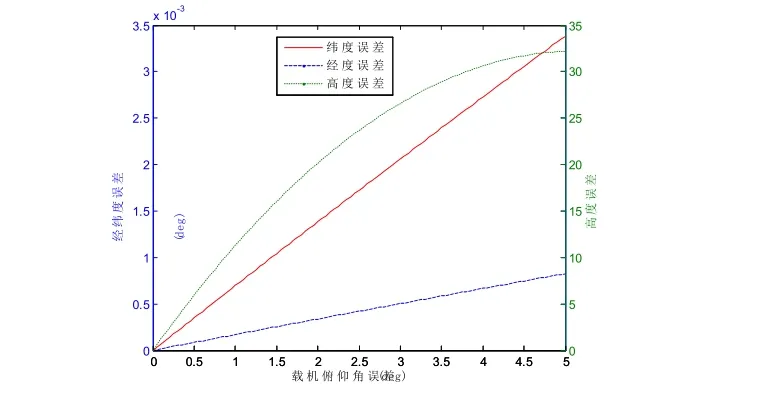
图5 载机俯仰角误差带来的定位误差
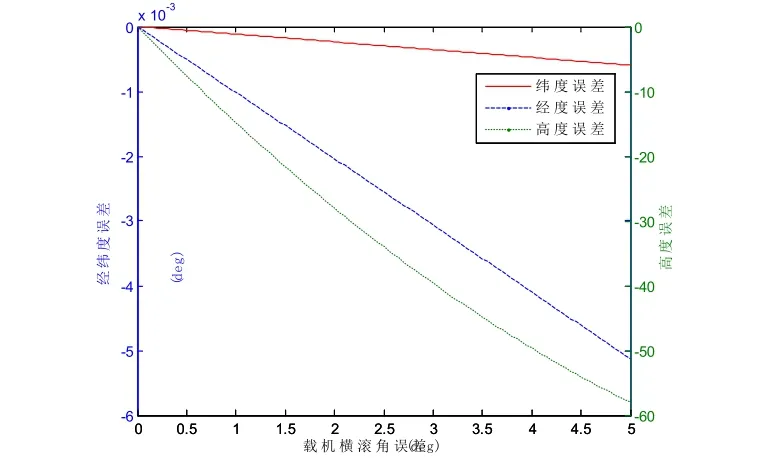
图6 载机的横滚角误差带来的定位误差
图7、图8和图9分别给出了在其它误差项目不变的情况下,载荷的方位角、俯仰角和到目标距离误差带来的目标定位误差变化情况。
一般情况下,载机姿态误差在0.5°以下,载荷姿态误差一般在0.05°以下,由图4~图8可知,载机姿态误差带来的目标定位误差要远大于载荷误差带来的目标定位误差。
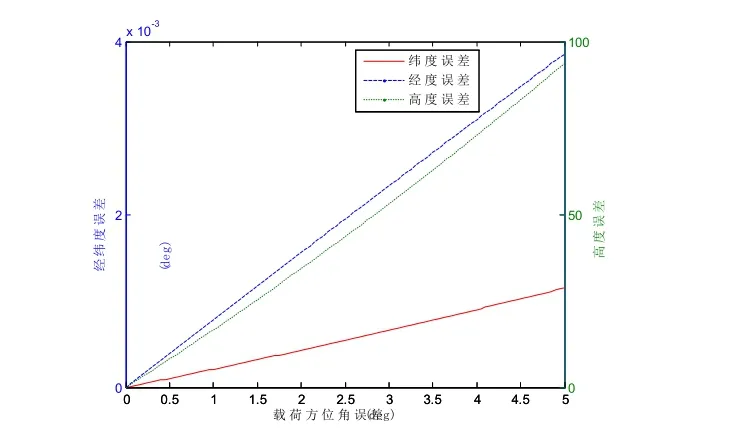
图7 载荷方位角误差带来的定位误差
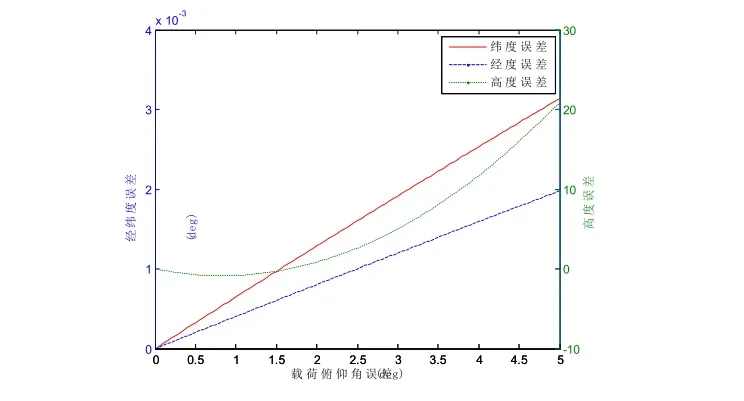
图8 载荷俯仰角误差带来的定位误差
目标距离误差R是(u、v、f、T、γ)的函数,一般情况下,光电载荷成像参数误差引入的目标距离误差不大于50m,由图上分析可知,到目标距离的误差造成的定位误差要小于载机姿态误差造成的目标定位精度。
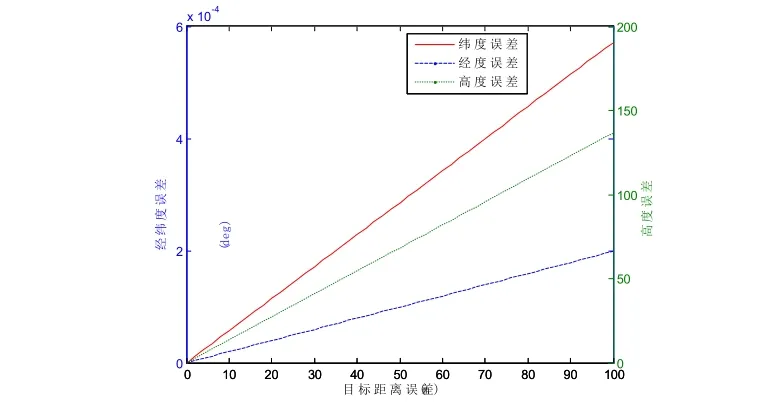
图9 目标距离误差带来的定位误差
2.2 减小误差的方法
由上述分析可知,通过提高连续图像的测距精度、提高光电载荷平台测角精度、使用高精度无人平台姿态测量设备和GPS等措施,可以减小光电载荷平台目标定位误差。提高无人平台姿态测量精度在减小目标定位精度方面能够起到较大作用,但在实际应用中,高精度无人平台姿态测量设备价格高昂,所以,需要结合实际需求指标进行系统考虑。但是,仅从技术上考虑,进一步提高光电载荷平台定位精度是非常有效的。另一方面,要向提高连续图像的测距精度,可采用连续求解多帧图像数据后均值的方法减少误差,在实际应用中可通过软件自动连续求解。
3 结束语
本文介绍了一种基于连续图像的无人平台载荷目标定位的原理和算法,该算法通过目标在多帧图像中位置的几何关系,求解无人平台到目标的距离,通过多个坐标的变化,推导出了目标的定位方程,最终获得了目标的地理坐标。通过对相关参数的误差分析和MATLAB仿真,获得了影响目标定位误差的分析和减小误差的方法。
文章编号:1009-8119(2016)03(1)-0061-04