使用SCL方法实现基于用户态度的机器人行为控制系统
2016-06-17陈雪沈阳工学院
陈雪沈阳工学院
使用SCL方法实现基于用户态度的机器人行为控制系统
陈雪
沈阳工学院
摘要:为了实现用户与机器人之间简单的对话,本文研究了一种基于用户皮肤电导水平(SCL)的机器人行为控制系统来评估用户态度的系统。本文主要探讨通过分析用户生理数据该控制系统让机器人产生改变话题等类似响应的可能性。该系统由两部分组成,一部分是通过对SCL的激励水平进行分析来预测用户态度,另一部分是控制机器人在用户SCL下降时仍然在程序的有效时间范围内。通过SCL测试,发现用户反应的几种不同趋势并对系统进行评估。
1 系统介绍
SCL信号显示了在皮肤电导中的逐渐变化,它被用于测量从平衡到动态激励的转换状态梅里菲尔德和Danckert的研究表明,无聊的生理特征相对于悲伤的是不断上升的心率,SCL的降低和增加的肾上腺皮质醇水平。而无聊的这些特征增加了持续对话的难度。SCL信号以16bit、20hz的电信号表示,使用蓝牙传输装置被传输到计算机中。
在之前的研究中,研究人员验证了[1]平衡理论是否适用于于人类和两个机器人之间,即由[2]海德制定的一个理论上解释人际关系模式的学说。该实验自动系统生成的场景建立三位一体的关系来控制两个机器人。在实验的第二部分,用户观看两个机器人互相交谈过程中,15名参与者有10名问卷回答的是“感到无聊”此时SCL的下降速率8.50%位于整个实验的最高值,其他区域保持不变或增加,由此可知两者间的变化关系。
本文提出了一个用于识别用户的态度的公式(1)。由于SCL个体之间差异大,所以研究着眼于SCL的倾向水平RATE。 系统通过判断是否满足下面两个条件来确认用户的厌倦情绪与否。

2 机器人行为系统实验
本次研究中,使用了交互式的类人机器人,它包括一个CPU可连到PC上。这里使用了两个PC,一个是内置与机器人中的服务器机器人PC,另一个是远程控制的客户端PC。
20-25岁左右的17个同学(14男、3女)参加了测试。他们都没有经常和机器人交互过。测试中,参与者坐在椅子上。测试人员在参与者看不到的位置控制机器人。
机器人有两种模式:1、问候和提问模式;2、感谢与赠与模式。在第1种模式中,机器人重复的问简单的问题。在参与者回答完机器人每次做“Right”应答。当系统通过SCR下降感知到用户的否定态度,它就转换到模式2。模式1设计用来使参与者生厌。模式2通过一系列机器人动作和附加的奖励来使参与者感兴趣。
实验结果如下。如图1中Q1是第一个问题,Q2是第二个,Q3是第三个。Last Q是改变模式之前的最后一个问题,用户的SCL通过重复问题被确认呈下降趋势。从图2中看出转换模式后,SCL的平均值显著增加。这些结果说明了SCL在人机交互中是有用的。
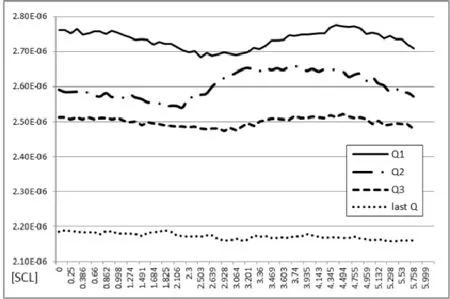
图1- 问问题的过程中使用者SCL的平均值
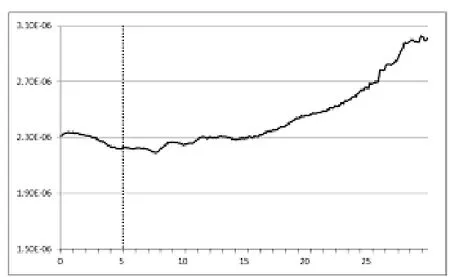
图2- 转换模式时所有参与者的平均SCL
3 结论及未来的工作
从17名参与者中12人并没有因为机器人的单一行为而感到无聊。实验结果上来看,兴趣缺失导致和用户个人习惯均能导致SCL的下降,同时其数值随话题变化而增加。研究还需要更多的参与者加入以改进这项系统。在今后,研究可分析皮肤温度和脉搏等其他生理因素。
许多人倾向于戴腕表类的设备连接到智能手机或其他更多用途。这些智能手表通常配备一个脉冲速率传感器,通过可穿戴设备系统能够借助生命信号获取用户的状态。未来可以实现使用一个虚拟代理来替代机器人实体。
参考文献
[1]M. Tsujimoto,N. Munekata and T. Ono. Evaluating how the impression formation between human and Rrbots is effected by the relation between the robots,proceedings of 1st International Conference on Human-Agent Interaction,2013.
[2]F. Heider,The psychology of interpersonal relations. Lawrence Erlbaum,1982.
通讯作者:史秀男
