自旋卫星几何定姿限制条件及误差分析
2016-06-13陈剑平
淡 鹏,陈剑平
(1.宇航动力学国家重点实验室 软件室,陕西 西安 710043;2.西安卫星测控中心,陕西 西安 710043)
自旋卫星几何定姿限制条件及误差分析
淡鹏1,2,陈剑平1,2
(1.宇航动力学国家重点实验室 软件室,陕西 西安710043;2.西安卫星测控中心,陕西 西安710043)
摘要几何方法是自旋稳定卫星姿态确定的基本方法,但在实际工程应用中常出现计算精度较低的问题。针对此问题,文中系统分析了利用不同观测量进行自旋稳定卫星姿态确定的几何计算方法,推导了各类计算公式的限制因素、误差敏感特性、使用条件等;并以某颗风云气象卫星测控过程中的实际观测数据为例,给出了其几何定姿偏差较大的几段数据的原因分析;探讨了提高几何定姿精度的途径。研究结果对自旋稳定卫星定姿精度的分析与提高,事后定姿计算精度方面均有一定的参考意义。
关键词自旋稳定;几何定姿;误差分析
自旋稳定是卫星姿态保持的一种重要方式。虽然目前三轴稳定[1]卫星占了绝大多数,但自旋稳定卫星因其简单可靠、运行稳定等特性,仍在卫星应用中拥有一席之地。对自旋稳定卫星,自旋轴姿态的确定具有重要的价值,其是卫星姿态控制与姿态保持等的基础。
自旋卫星姿态确定方法常用的有几何方法[2]和滤波方法等[3]。文献[4]还给出了一种特定条件下的序列计算方法。但这些方法的使用都有其制约因素,需要受到几何条件等的限制。特别是在转移轨道段,姿态变化幅度大,几何关系复杂,从而使定姿结果常出现较大偏差。对姿态确定来说,找出这些限制因素及误差大的原因,就具有重要意义。如在机动后的精确定姿中,通过对观测条件不佳以及可能带来较大误差的数据的剔除,可有效提高事后定姿的精度。
目前我国发射的自旋稳定卫星主要采用太阳敏感器与红外地球敏感器来进行姿态测量。例如2014年发射的某颗风云[5]气象卫星就是此类自旋稳定卫星。本文从工程实际应用角度,以风云气象卫星实测数据为例,对自旋稳定卫星几何法姿态计算的限制条件与误差因素等进行了分析。
1几何定姿使用限制与误差分析
目前在工程上,对太阳-地球方式来进行自旋姿态计算时,需要确定自旋轴与太阳方向的夹角(记为太阳角θs)以及自旋轴与地球方向的夹角(记为地球角θe)。根据任务特点,太阳角一般易于满足定姿需要。因而下面主要从地球角及自旋轴方向矢量计算等方面对误差因素进行分析。
1.1地球角计算及误差分析
地球角θe的计算主要通过安装在星体上的红外地球敏感器计算得到,将北红外地球敏感器测量的地球弦宽(扫描弦宽)角称为北弦宽(记为φn),将南地球敏感器测量的地球弦宽称为南弦宽(记为φs),北地球敏感器安装角记为γn,南地球敏感器安装角记为γs。
以卫星质心为原点,做单位天球,姿态测量几何在天球上的示意图如图1所示。
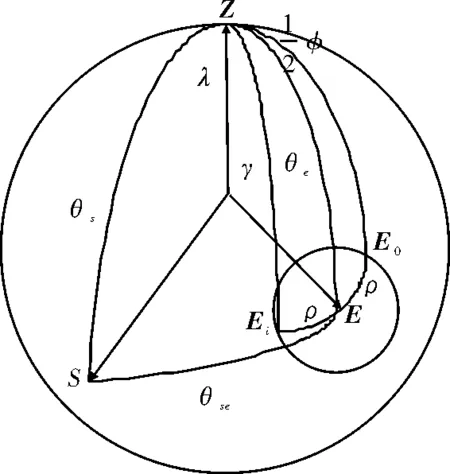
图1 测量几何天球示意图
1.1.1单红外弦宽测量计算地球角
由球面三角形有
(1)
其中,ρ为地球半张角;计算公式为ρ=arcsin((Re+ha)/R),其中ha为地球辐射层高度,如取20 km,R为卫星地心距,根据卫星入轨后的位置关系,可得0≤ρ≤π/2。
由式(1)可解出θe的两个解为
(2)
由于测量数据不可避免存在一定误差,导致算出的地球角也存在误差。为找出弦宽误差对地球角计算结果的影响,计算地球角对弦宽的偏导数。将式(1)对弦宽φ求偏导,可推导出
(3)

(4)
此时,地球角对红外弦宽的偏导数接近无穷大,此时很小的红外弦宽测量误差会引起地球角计算误差的显著增大。式(3)即弦宽误差对地球角误差的影响因子,此值越大,由相同的弦宽测量误差引起的地球角计算误差也将越大。
(5)
据此ZEEi形成球面三角形时,必然满足此条件。但由于测量误差的存在,可能使得此式满足不了该条件,对此需在定姿时注意对ZEEi形成不了三角形数据的处理。
对式(5),当右端项>1时,不构成三角形,当其等于1时,∠ZEEi为π/2,此时弦宽误差影响显著。
1.1.2单红外两面角测量计算地球角
将自旋轴指向与航天器到日心方向所在平面以及自旋轴指向与航天器到地心方向所在平面之间的夹角称为两面角(记为λse),可由地中脉冲与太1脉冲之间的时间间隔及相关敏感器安装相位角计算得到。由航天器轨道信息可较精确地计算出质心与太阳连线矢量、质心与地球连线矢量之间的夹角(称为测量几何角,记为θse)。
对球面三角形ZES有
ZEEθse=ZEEθsZEEθe+sinθssinθeZEEλse
(6)
据此可得到θe的两个解为
(7)
同理可推导出当∠ZES为π/2时,二面角对地球角的误差影响因子最大。同样应用式(6)时需要ZES构成球面三角形。且当
tanθe-tanθsZEEλse=0
(8)
时,极小的两面角测量误差会对地球角带来较大的计算误差。记角∠ZES为η2,参见式(5),由球面三角形正弦公式可得出
sinη2=sinθssinλ/sinθse
1.1.3单红外两面角与弦宽联合计算地球角
当同时使用弦宽测量与二面角测量计算地球角时,由式(1)和式(6)联立方程组,若其系数行列式不为0,即
(9)
时,可解出θe为
(10)

1.1.4双红外弦宽测量计算地球角
式(2)和式(7)在计算地球角时都有双解,需要根据先验信息来进行解的真伪判别。
当两只地球敏感器可同时有效观测地球弦宽时,可得到两个测量方程
据此可得到由南北弦宽解算θe的公式为
(11)
式(11)分别对φN、φS求偏导,可得北弦宽、南弦宽对地球角的误差影响因子为
由以上两式可见,采用式(11)计算地球角时,南北弦宽误差影响均不会过大。
1.2赤经赤纬计算及误差分析
自旋卫星的姿态常用自旋轴方向矢量P在地心惯性系下的赤经赤纬[6]来表示。由卫星轨道数据,行星星历表等可计算出天球上地球方向矢量EW、太阳方向矢量SW,由SW与EW叉乘可确定垂直于这两个矢量的法线矢量N,进而计算出N与SW的叉乘矢量Z,这样只需计算出P与N、Z、SW三向量之间夹角的余弦即可得到P的表达式。图2为矢量P解算示意图,设OSwP面与OSwEw面之间的二面角为ζ,P与N夹角为φ1,P与Z夹角为φ2,由球面三角形余弦公式即可解算出φ1与φ2的余弦值为ZEEφ1=sinθssinζ和ZEEφ2=sinθsZEEζ。进而推导出自旋轴矢量计算公式为
(12)

图2 自旋轴矢量解算示意图

从几何关系图中可看出,此方法运用的条件是SW与EW不能共线;另外,计算ζ对θe的偏导后也会发现θse在0°、180°附近θe的偏差对ζ影响较大。且由上述计算公式可知,ζ是ZEEφ1、ZEEφ2值的基础,这就要求PSWEW需构成球面三角形,即θse、θe、θs的值满足
(13)
另外计算中使用了λse进行取值判断,若λse存在误差,则会使二面角在0°、180°处存在判断错误的可能。
另外,也可由θe、θs、λse得到姿态方程
SW·P=ZEEθs
(14)
EW·P=ZEEθe
(15)
(SW×EW)·P=sinθssinθesinλse
(16)
联立这三式直接运用矩阵运算即可解出P的分量。
此种方法也要求SW与EW不能共线,且计算中使用了λse,会将其误差直接带入P的确定过程中,若λse误差大,将对结果误差造成较大影响。解算出P矢量后,即可根据姿态定义算出自旋轴的赤经赤纬值。
1.3其他误差影响因素
除了几何条件限制,以及测量数据存在的系统误差、随机误差外,定姿精度还受章动角[7]变化、计算方法的选择以及姿态机动情况等多种因素的影响。
地球角计算公式(2)、式(7)、式(10)、式(11)分别给出了使用不同测量量计算的方法,实际使用上除考虑几何条件的制约外,还需注意测量量误差对结果误差的影响。从工程实际应用来看,一般λse测量的系统误差较大,因而限制了式(7)的应用。
2实测数据分析
以2014年发射的某气象卫星定点实施过程中的实测数据为例,对自旋卫星几何定姿误差情况及产生原因进行分析。
2.1样本数据1
某卫星在积秒52 200 s实施了一次“大调姿”控制,控制前的一段时间内只有南红外有有效测量数据,其中一段时间内几何定姿计算的赤经赤纬值误差较大,如图3所示。

图3 单红外不同公式计算的赤经赤纬曲线
此时间段内,未对姿态进行控制,赤经赤纬值应保持稳定(赤纬约在-25°),但由式(2)计算地球角时,导出的赤经赤纬在49 500~51 500 s之间出现较大偏差。式(7)与式(10)计算时,虽赤经赤纬较为稳定,但由于此段时间内二面角系统误差大,致使结果值偏差较大。从计算结果来看,式(2)对弦宽误差敏感,式(7)对两面角误差敏感,式(10)对弦宽与两面角误差均敏感。
此时,由式(4)左端项及式(5)右端项计算的值情况如图4所示。
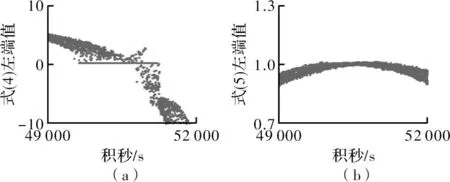
图4 式(4)左端项与式(5)右端项值曲线
从图中看出,此段时间内式(4)左端项值较小,式(5)右端项部分值甚至>1。即此段时间内弦宽误差影响因子大,对部分数据点,ZEEI已不构成球面三角形了。
在后面的“小调姿”前一段时间内也出现了一段(约82 000~83 150 s)弦宽误差影响因子大致使赤经赤纬误差大的情况。
2.2样本数据2
选择竖法向后41 000~51 000 s之间的一段数据,此段时间北、南红外均可见,由自旋轴矢量计算方法1,由式(12)计算以及方法2,式(14)~式(16)计算得到的赤经赤纬曲线,如图5所示。在方法1计算中,对式(13)左端项,若绝对值>1时,按取值。

图5 两种方法计算的赤经赤纬曲线
此段区间的测量几何角θse、两面角λse、南弦宽φs、北弦宽φn、地球角θe曲线如图6所示。

图6 测量几何角、两面角、弦宽与地球角示意图
从图6看出,这4个值均未出现大幅跳变。但图5中,方法1计算的赤经赤纬在44 800~47 700之间误差较大,其原因在于此弧段内,式(13)左端项绝对值超过1,已经无解。式(13)左端项值曲线如图7所示。

图7 式(13)左端项值
另外,此时段内,方法2计算结果虽然比较平滑,但由于二面角系统误差大,导致计算结果存在较大偏差。
3结束语
本文从工程实际应用角度,对自旋卫星几何定姿的常用方法进行了总结,分析并给出了各类方法的误差因素及使用限制。从公式的推导过程及某气象卫星实测数据的分析中可得出以下结论:(1)自旋卫星几何定姿常用的各计算方法均存在使用的限制条件,不管在地球角还是自旋轴赤经赤纬的计算中,均应考虑到当前几何特征的局限及影响,以及所选用计算方法对几何关系的要求;(2)自旋卫星几何定姿方法存在奇点和误差大的区间,在该区间内定姿结果会出现较大误差;(3)测量数据的系统误差也是影响结果精度的重要原因。若能消去两面角的系统误差,在有些误差大区间使用两面角参与计算也不失为一种较好的补充方法;(4)在事后定姿中,应选取几何条件好、误差影响小的观测区间是降低事后定姿误差的必要手段。
应看到自旋卫星定姿过程有其自身的明显特点。各类影响因素的作用使得几何方法变得复杂和容易出错。因而采用其他手段,如滤波算法等,就成了消除误差和提高计算精度的重要途径。但几何方法仍是此类卫星定姿计算的基本方法。
参考文献
[1]淡鹏,张定波,王丹,等.三轴稳定卫星姿态可视化绘制与建模[J].电子科技,2014,27(5):136-139.
[2]王玉祥,李祥明,李凌.卫星姿态的几何确定方法初探[J].遥测遥控,2007,28(6):1-5.
[3]王振平,王恒,钱小云,等.卡尔曼滤波技术在自旋卫星姿态确定中的研究与应用[J].遥测遥控,2010,31(5):61-66.
[4]吕晓峰,王大力.一种确定自旋卫星姿态的新方法[J].上海航天,2011(1):40-45.
[5]钱云.风云二号卫星地球观域修正算法[J].应用气象学报,2008,19(5):635-640.
[6]淡鹏,王丹,侯黎强,等.火箭飞行姿态的可视化绘制方法[J].弹箭与制导学报,2014,34(2):98-100.
[7]田林,徐世杰.自旋小卫星姿态动力学建模与控制研究[J].空间控制技术与应用,2009,35(1):47-50.
Error Analysis of Geometry Attitude Determination of Spin-stabilized Satellites
DAN Peng1,2,CHEN Jianping1,2
(1.Software Room,State Key Laboratory of Astronautic Dynamics,Xi’an 710043,China;2.Xi’an Satellite Control Center,Xi’an 710043,China)
AbstractThe geometry attitude calculation is the basic method of spin-stabilized satellites,but suffers poor calculation accuracy in attitude determination in the actual engineering task.A geometry attitude calculation method using different type of measurement is given systematically.The limiting factor,the error sensitive characteristics,and service conditions are analyzed.Then some true metrical data of an FY meteorological satellite are used to analyze the error reason.And methods for improving the accuracy are proposed.The analysis result offers references in the analysis of spin-stabilized satellites’ attitude determination and the improvement of the accuracy of afterwards attitude determination.
Keywordsspin-stabilized;geometry attitude determination;error analysis
doi:10.16180/j.cnki.issn1007-7820.2016.05.018
收稿日期:2015-10-06
作者简介:淡鹏(1979—),男,硕士,工程师。研究方向:航天数据处理与可视化。
中图分类号V448.22
文献标识码A
文章编号1007-7820(2016)05-062-05