基于SUSAN角点和HSV颜色模型的粒子滤波目标跟踪算法
2016-06-08杨德红
闫 河 刘 婕 王 朴 杨德红
(重庆理工大学计算机学院 重庆 400054)
基于SUSAN角点和HSV颜色模型的粒子滤波目标跟踪算法
闫河刘婕王朴杨德红
(重庆理工大学计算机学院重庆 400054)
摘要针对传统粒子滤波目标跟踪算法在目标与背景颜色相似情况下目标定位偏差大、易导致丢失目标的缺陷,提出一种基于角点和颜色模型的粒子滤波目标跟踪算法。首先,提出一种改进SUSAN角点检测算法,采用圆形模板邻域内像素灰度值中值代替模板中心像素灰度值作为模板“核”来检测区域目标角点,其改进SUSAN角点算法在继承原有SUSAN算法计算简单、定位准确、具有旋转不变性等特点的同时,具有更好抗噪声性能;其次,利用HSV颜色模型光照不敏锐特性,对检测到的角点建立HSV颜色模型,并将其嵌入到粒子滤波框架中,实现对目标的跟踪。实验结果表明,当背景与目标颜色相近时,该算法能够有效避免背景对目标的干扰,取得了较好的目标跟踪性能。
关键词SUSAN角点检测粒子滤波算法目标跟踪HSV颜色模型
0引言
粒子滤波目标跟踪算法采用粒子集表示概率分布,具有非参数化特点,能比较精确地表达基于观测量和控制量的后验概率分布,并利用粒子和权值完成目标状态估计[1]。传统粒子滤波目标跟踪算法常采用RGB颜色直方图特征建立目标模型进行跟踪。颜色特征具备持久稳定性,对物体姿态变化和非刚体变形不敏锐,在旋转和尺度变换上具有一定的鲁棒性[2-4]。但是,在目标和背景颜色相似较高时,RGB颜色特征表征目标的方法难以有效区分目标和背景[5,6],易导致目标跟踪性能下降。近年来,人们更多研究如何合理选择目标视觉特征来提升粒子滤波目标跟踪准确性。Ido等[7]利用颜色和边缘特征结合减弱背景的干扰,实现目标跟踪;Campos等[8]利用SIFT(Scale Invariant Feature Transform)特征点进行定位;王向军等[9]利用Plessey角点特征进行目标跟踪。
由于角点特征是一个重要的局部不变特征点,具备很强的目标表征能力。其表现形式是图像亮度发生剧烈变化或图像边缘曲线上曲率极大值的点,具有旋转、平移、缩放不变的性质。并且能够在保留图像重要特征的同时,还能够有效地减少背景信息的干扰,增强目标与背景区域之间的辨别力,以提高目标信息含量。因此,广泛应用于目标识别、目标跟踪等领域[10]。角点检测算子常用Harris[11]和SUSAN算子[12,13],其中,SUSAN角点采用圆形模板,能够检测到各个方向角点,图像旋转对角点检测无影响,并不依赖于梯度,具有计算简单且定位准确的特点。
为了克服背景对目标的干扰,提出基于SUSAN角点和HSV颜色模型的粒子滤波目标跟踪算法。其改进SUSAN算子是利用模板邻域内的中值来取代模板中心像素值,具有一定滤波平滑作用,起到抗噪性能。RGB颜色空间不符合人对颜色的感知心理,然而HSV颜色空间是一种面向视觉感知的颜色模型,同时HSV颜色模型降低了对光照的敏感度[14]。因此,本文首先采用改进SUSAN角点检测算子提取角点特征;其次,利用提取的角点特征建立HSV颜色直方图描述目标模型,能够有效增强目标与背景之间的辨识度;最后,在粒子滤波目标跟踪的框架下实现目标跟踪,能够有效地提高跟踪精确度。
1角点检测
1.1改进SUSAN角点检测

图1 SUSAN模板
角点为目标轮廓上某些属性强度最大或者最小孤立点,或者目标轮廓线上局部曲率最大点。角点检测实质上就是捕捉目标兴趣点或特征点。SUSAN[12]是一种近似圆形模板角点检测算法。对目标角点检测具有旋转不变性,SUSAN角点模板一般包含37个像素点,如图1所示。
设定圆形模板为N(x,y),模板中心像素被称为“核”,并使用这样一个模板扫描整幅图。“核”邻域可划分为2个区域,以“核”为中心模板窗中存在像素灰度值与“核”点像素灰度值相似的区域USAN(Univalve Segment Assimilating Nucleus)和灰度值不相似核点像素灰度值的区域。其中,USAN区域包含了图像结构的重要信息,USAN面积随着模板所在位置不同而发生变化。当模板中心像素点处于图像目标区域内部时,USAN面积最大;当该像素坐标点位于图像目标区域边缘时,则面积为最大的一半;当该像素点为角点时,USAN区域面积不大于最大面积的1/4。因此,能够根据SUSAN算子中USAN区域面积来检测当前像素点为区域内部点、边界点,还是角点。使用下面相似比较函数公式来计算USAN区域面积。首先,对模板中的像素进行排序Sort(I(x,y))得到38个数据,令中间数据为m和n。
I(x0,y0)=(m+n)/2
(1)
(2)
其中,I(x0,y0)为改进中心像素灰度值,即是利用模板内像素灰度值中值代替原模板“核”中心灰度值,I(x,y)为模板内非“核”点像素灰度值,(x0,y0)和(x ,y)为像素点位置,t为灰度值差阈值即是区分目标特征与背景阈值。模板中所有点与“核”点灰度值比较之和即为某一点USAN区域面积大小,可用式(3)表示:
(3)
通过式(3)得到USAN区域的像素个数即为SUM(x0,y0)。将该值与一个给定阈值G通过以下角点初始响应函数:
(4)
其中,G假设为USAN最大区域时的一半,即G=37×(1/2)。并通过对初始响应角点进行局部非极大值抑制,可以检测出图像目标的大部分特征角点。
1.2角点提取实验
如图2所示,飞机具有一定的结构特征,根据角点检测算子原理可知,检测出来的角点将集中在飞机目标上。图2第一列为未加噪声图像提取角点图,第二列表示添加了均值为0,方差为0.1的高斯噪声图像提取角点图。(b)、(c)分别是用原始SUSAN角点算子和改进SUSAN角点算子对(a)角点检测结果。由于改进SUSAN的角点检测方法有一定滤波作用,能够有效抑制噪声干扰。从实验结果图2可知,对于目标与背景信息颜色相似情况下,提取的角点特征集中在目标上,改进SUSAN检测能够更好地定位目标,降低背景干扰。因而,改进SUSAN角点检测在含有噪声图像中能够有效提高了目标与背景的辨识度。
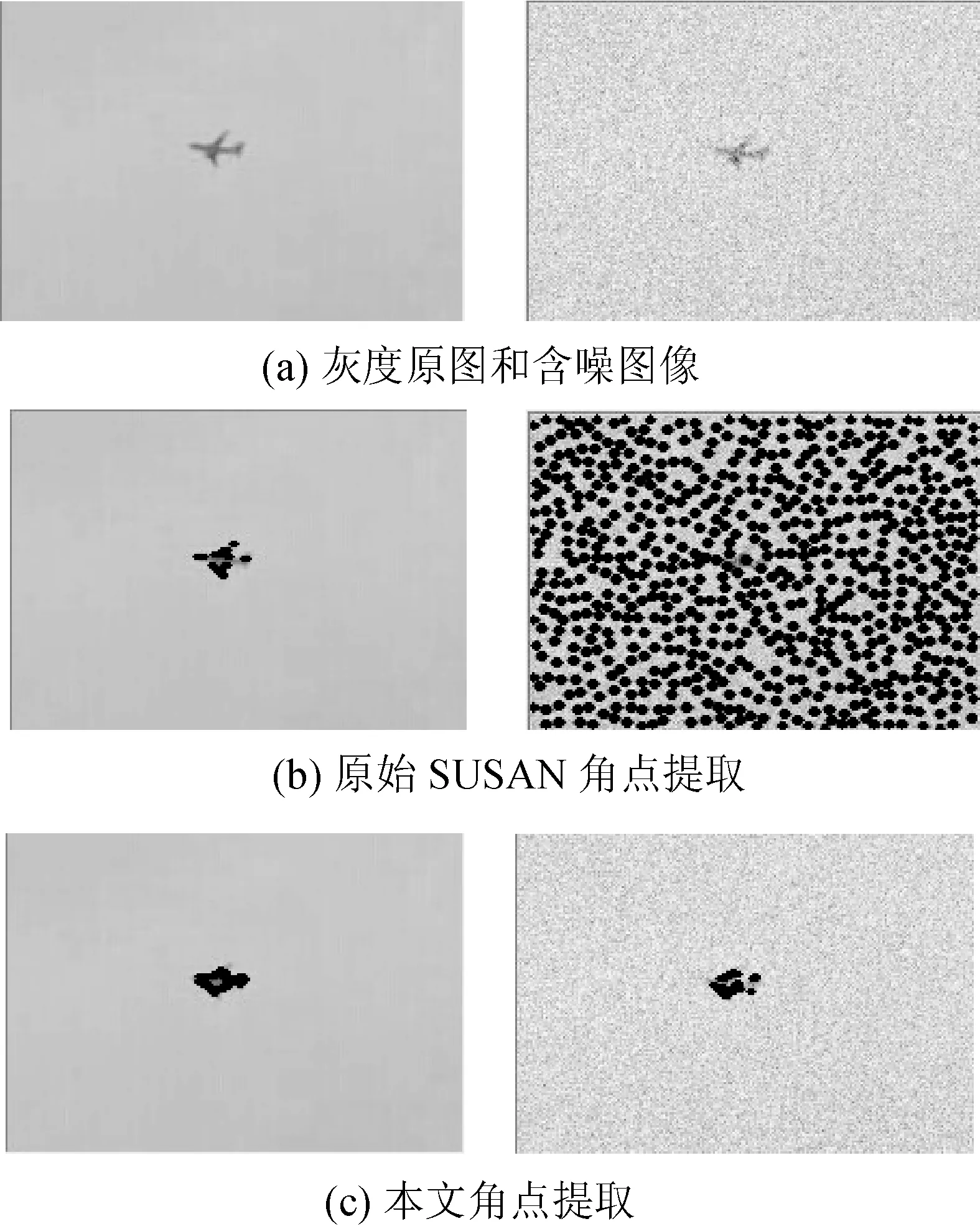
图2 角点提取图像
2改进的目标跟踪算法
在传统粒子滤波目标跟踪算法(PF)[15-18]中,常常以RGB颜色直方图建立目标模型,实现对目标的跟踪。由于颜色特征建立模型时,区域中所有像素点都参与运算,使得引入了很多背景信息,造成目标跟踪定位偏差大。但角点具有很强目标表征能力,能够有效区分目标与背景。因此,本文算法提出利用跟踪窗口中角点特征,并提取这些角点的HSV颜色特征构建目标模型和候选目标模型,以减少背景信息,增强抗背景信息干扰的能力,有效提高跟踪的准确性。
改进目标跟踪算法基本步骤如下:

(5)
(6)
(7)

(8)
步骤4更新过程。通过式(8)对每一个粒子进行传递后,计算出每个粒子的颜色概率分布pi,i表示为第i个粒子,每个粒子表示一种候选概率,根据粒子似然性来重新确定每个粒子的权值。通过这些角点的HSV颜色模型得到每一个粒子的角点颜色相似性ρy(p,q),并利用正态分布函数作为似然函数,即粒子的权值为:
(9)
并将其进行粒子权值的归一化,即为:
(10)
步骤5目标状态的估计值。通过式(10)计算出每一个粒子的归一化权值,采用加权准则确定目标的最终位置,即为:
(11)
步骤6读取下一帧图像,若读取帧数为总帧数,则退出,小于总帧数,返回步骤2。
3实验结果分析
本文通过采集2个视频,比较几种不同目标跟踪算法性能。在粒子滤波目标跟踪中,使用RGB颜色模型,量化空间16×16×16;采用HSV颜色模型,量化空间8×4×4。在软件平台opencv2.4.0结合vs2010实现。
本文第一个视频序列图像采集于天空,序列图像大小480×640,帧速率20帧/秒,天空中飞机作为目标对象,进行跟踪。图3是不同算法部分实验跟踪结果,表1和表2分别是相应帧中心位置坐标点值及相应帧误差,表3表示整段视频平均误差,用误差均值和方差表示。从视频中观察,飞机运动趋势基本呈现水平,其主要误差影响因素是水平方向。图3(a)、(b)分别采用传统粒子滤波跟踪算法和基于HSV颜色目标跟踪算法进行跟踪。目标与背景颜色相似时,从跟踪视频序列结果观察和表3可知,采用HSV颜色比RGB颜色直方图建立目标特征,在跟踪准确度有所提高,但跟踪目标仍然出现较大偏差,甚至导致跟踪目标丢失。图3(c)、(d)分别采SUSAN角点和本文跟踪算法,都对背景信息对目标信息干扰有一定抑制作用,由实验结果分析可知,本文算法能够有效提高跟踪准确度。

图3 不同的跟踪算法的实验结果(从左到右,从上到下:6,15,24,46)

坐标点值第6帧第15帧第24帧第46帧手动坐标(413,280)(379,271)(332,260)(200,249)RGB(414,272)(380,263)(318,248)(257,238)HSV(413,275)(371,264)(323,262)(254,233)原始SUSAN+HSV(409.277)(375,266)(329,252)(204,241)本文算法(413,277)(379,271)(332,260)(205,248)

表2 相应帧误差
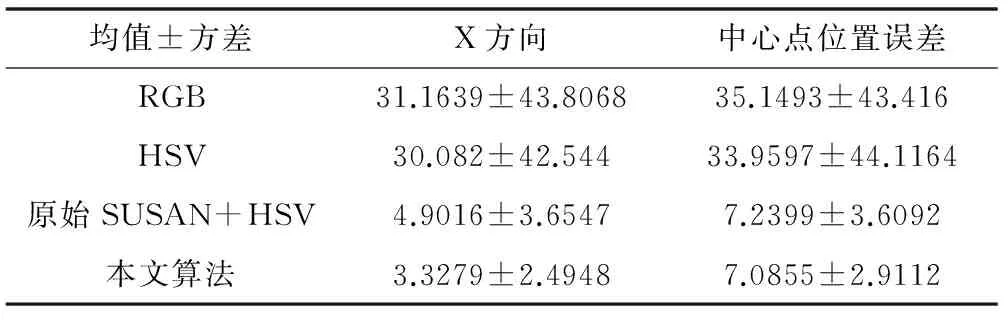
表3 X方向误差及中心位置误差(均值±方差)
第二个视频是一段足球场视频图像序列,序列图像大小720×1280,帧速率25帧/秒,跟踪一个在足球场上穿着绿色上衣的运动员。图4是不同算法部分实验跟踪结果,表4和表5分别是相应帧中心位置坐标点值及相应帧误差,表6表示整段视频平均误差,用误差均值和方差表示。从视频中观察,运动员的运动趋势基本呈现水平,其主要误差影响因素是水平方向。图4(a)、(b)分别采用传统粒子滤波跟踪算法和基于HSV颜色的目标跟踪算法进行跟踪。从跟踪的视频序列结果观察和表6可知,采用HSV颜色比RGB颜色直方图构建目标特征,在跟踪准确度有所提高。但该运动员上衣与足球场地颜色相似,仍然导致进行跟踪目标存在一定的困难。其表现形式为跟踪目标出现较大偏差,甚至导致跟踪目标丢失。图4(c)、(d)分别采SUSAN角点和本文跟踪算法,都对背景信息对目标信息干扰有一定的抑制作用。由实验结果分析可知,本文算法能够有效提高跟踪的准确度。
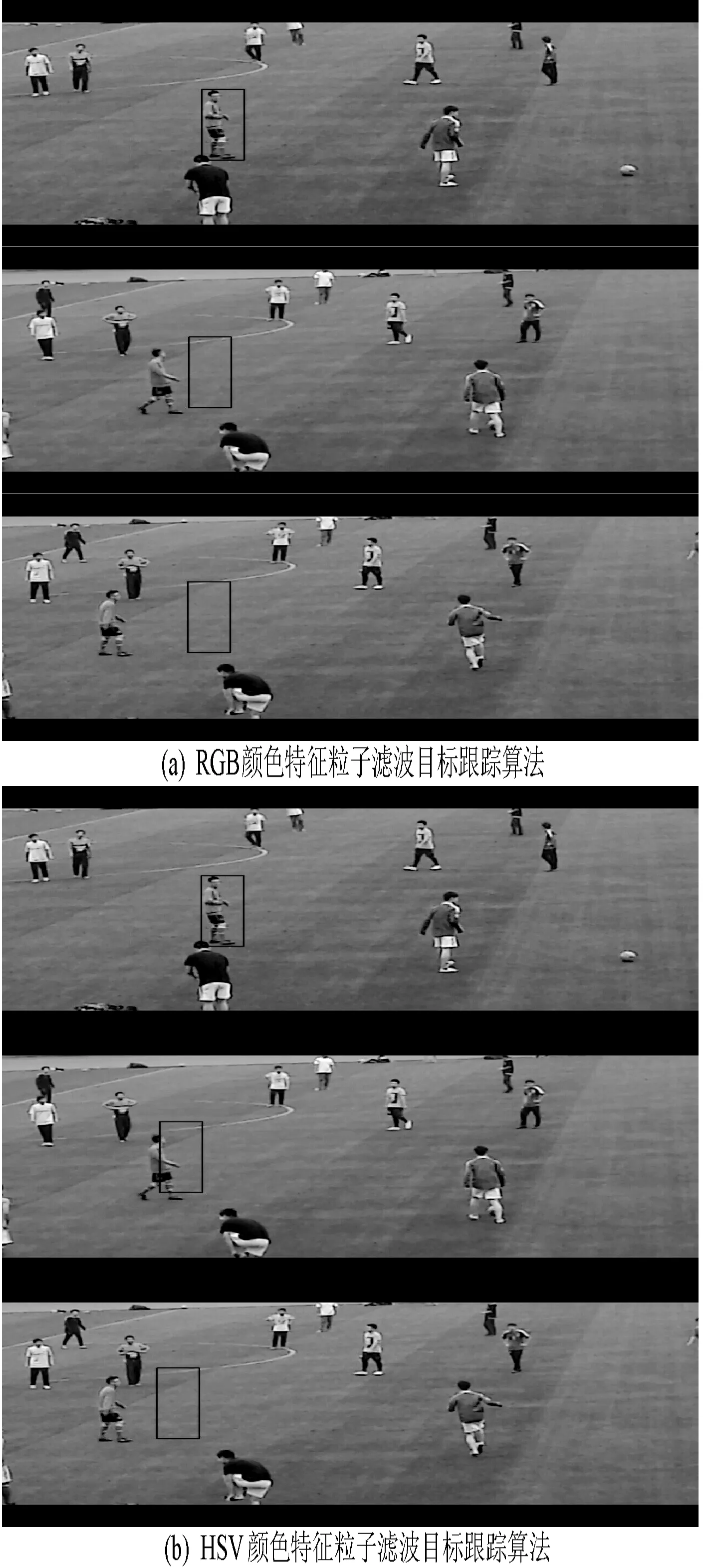
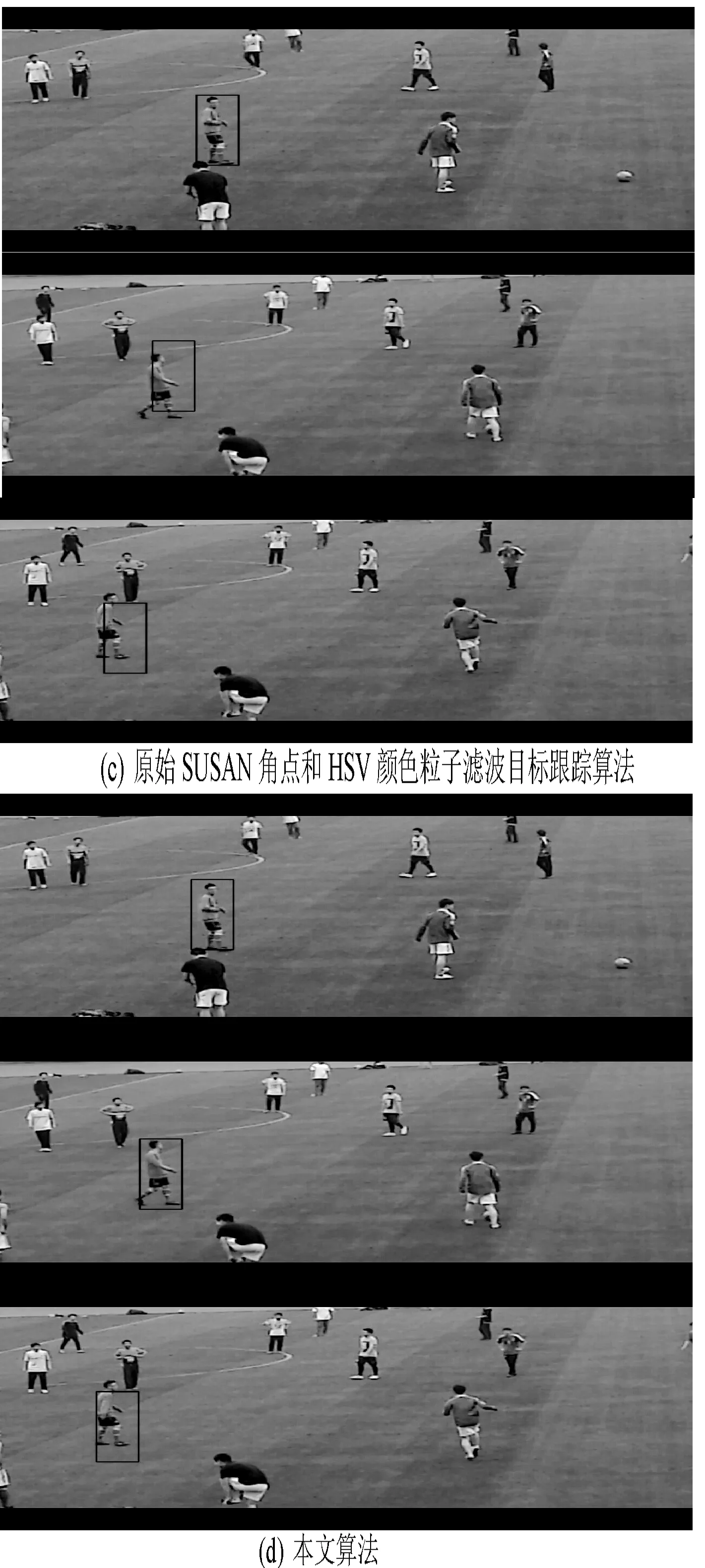
图4 不同的跟踪算法的实验结果(从上到下:3,39,59)

第3帧第39帧第59帧手动坐标(392,354)(216,416)(290,365)RGB(406,363)(382,365)(380.358)HSV(405,364)(329,361)(323,359)原始SUSAN+HSV(398,361)(317,362)(231,412)本文算法(392,354)(217,416)(297,395)
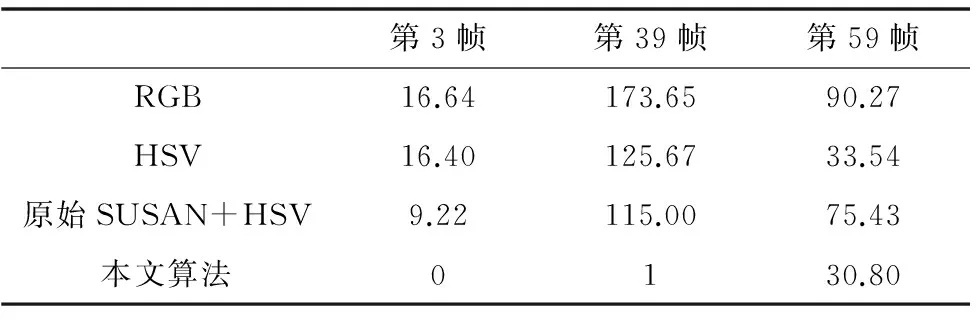
表5 相应帧误差
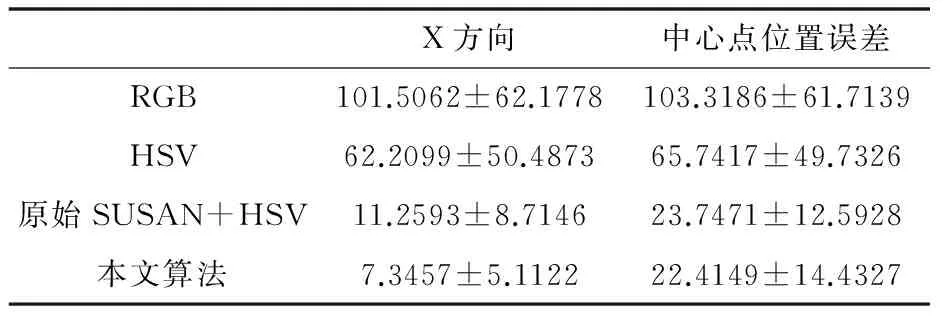
表6 整段视频中心误差(均值±方差)
4结语
在目标与背景颜色相似情况下,针对传统粒子滤波目标跟踪算法对目标定位产生一定偏差甚至导致跟踪目标丢失的缺陷。考虑到角点是一种局部不变特征,具有较强的目标表征能
力,能够有效区分目标与背景颜色信息。因此,本文提出了基于SUSAN角点和HSV颜色模型的粒子滤波目标跟踪算法。首先利用改进SUSAN角点检测算法提取目标区域的角点特征;其次,利用这些角点的HSV颜色直方图建立目标模型;最后,引入粒子滤波目标跟踪框架,实现对目标的跟踪。通过实验对比,表明本文算法在目标跟踪准确度上具有较好的效果。
参考文献
[1] 周帆,江维,李树全,等.基于粒子滤波的移动物体定位和追踪算法[J].软件学报,2013,24(9):2196-2213.
[2] Nummiaro,E KollerMeier,LVan Gool.An adaptive color-based particle filter[J].Image and Vision Computing,2003,21(1):99-110.
[3] Czyz J,Ristic B,Macq B.A particle filter for joint detection and tracking of color object[J].Image Vison Comput,2007,25(8):1271-1281.
[4] 谢天旭,何炳蔚.基于颜色特征与SIFT特征自适应融合的粒子滤波跟踪算法[J].计算机应用研究,2013,30(11):3506-3509.
[5] 刘彬,李学斌.角点匹配与均值漂移相结合实现目标跟踪[J].计算机应用与软件,2013,30(4):239-242,318.
[6] 冯增光,张烔,宁纪锋,等.基于角点检测的实时目标跟踪方法[J].计算机工程与设计,2012,33(10):3892-3897.
[7] Ido L,Michael L,Ehud R.Tracking by affine kernel transformations using color and boundary cues[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,2009,31(1):164-171.
[8] Campos F M,Correia L,Calado J M F.Mobile robot global localization with non-quantized SIFT features[C]//The 15thInternational Conference on Advanced Robotics,Tallinm,Estonia:IEEE,2011:582-587.
[9] 王向军,王研,李智.基于特征角点的目标跟踪和快速识别算法研究[J].光学学报,2007,27(2):360-364.
[10] 张桂南,刘志刚.基于角点匹配与谱聚类的接触网绝缘破损/夹杂异物故障检测[J].仪器仪表学报,2014,35(6):1370-1377.
[11] Liu Y,Hou M,Rao X,et al.A steady corner detection of gray level images based on improved Harris algorithm[C]//Proc Int Conf on Networking Sensing and Control,20008:708-713.
[12] Smith S M,Brady J M.SUSAN:A New Approach to Low Level Image Processing[J].Int.Journal of Compuer Vision,1997,23(1):45-78.
[13] Benedikt K,Gunther H.A spatio-temporal extension of the SUSAN-Filter[C]//LNCS5163:Proceedings of the 18thinternational conference on Artificial Neural Networks,2008:867-876.
[14] 时建桃,王国胤,王进.缩微交通环境下的锥形标识方法[J].合肥工业大学学报:自然科学版,2012,35(12):1644-1647.
[15] Nummiaro K,KollerMeier E,Van Gool L.An adaptive color-based particle filter[J].Image and Vision Computing,2003,21(1):99-110.
[16] Nummiaro K,KollerMeier E,Van Gool L.Color Features for tracking non-rigid objects[J].Acta Automatica Sinica,2003,29(3):345-355.
[17] 朱良谊,王庆.一种基于粒子滤波的优化目标跟踪算法研究[J].西北工业大学学报,2013,31(6):967-973.
[18] 陈善静,杨华,曾凯,等.基于多特征融合的粒子滤波算法研究[J].计算机工程,2011,37(7):178-180.
[19] 李睿,刘昌旭,年福忠.基于自适应背景的多特征融合目标跟踪[J].计算机应用,2013,33(3):651-655.
PARTICLE FILTER OBJECT TRACKING ALGORITHM BASED ON SUSAN CORNER DETECTION AND HSV COLOUR MODEL
Yan HeLiu JieWang PuYang Dehong
(SchoolofComputerScience,ChongqingUniversityofTechnology,Chongqing400054,China)
AbstractFor deficiencies of traditional particle filter object tracking algorithm in bigger deviation of object localisation and being prone to object missing when its colour is similar to background, we proposed a particle filter object tracking algorithm which is based on corner and colour model. First, we presented an improved SUSAN corner detection algorithm, which uses median grayscale value of the pixel in neighbourhood of circular template instead of the greyscale value of the pixel in template centre as the “kernel” of the template to detect regional object corner, the improved SUSAN corner algorithm not only inherits the characteristics of original SUSAN algorithm, such as simple calculation, accurate positioning, rotation invariance, etc., but also has better anti-noise performance. Secondly, we utilised the characteristic of illumination invariant in HSV colour model to build HSV colour model for the detected corner, and then embedded it into the particle filter framework to realise object tracking. Experimental results showed that when the background closed to the target colour, this algorithm could effectively prevent the interference of background and achieved a better object tracking performance.
KeywordsSUSAN corner detectionParticle filter algorithmObject trackingHSV colour model
收稿日期:2014-10-09。国家自然科学基金面上项目(61173184);重庆理工大学研究生创新基金项目(YCX2013219)。闫河,教授,主研领域:图像多尺度几何分析,目标跟踪,模式识别。刘婕,硕士生。王朴,硕士生。杨德红,讲师。
中图分类号TP391
文献标识码A
DOI:10.3969/j.issn.1000-386x.2016.05.043
