一种机载卫星通信终端频率捕获跟踪算法
2016-06-06段勇存王力男裴文端
段勇存,王力男,裴文端
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
一种机载卫星通信终端频率捕获跟踪算法
段勇存,王力男,裴文端
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
摘要:作为一种特殊的卫星通信设备,机载卫星通信终端在工作环境上和普通通信终端有很大的区别。在终端通信过程中,多普勒频移变化给频率捕获和跟踪带来了很大的困难。针对机载终端通信过程中多普勒频移变化快的问题,提出一种多波束载波频偏估计算法。详细描述了频率捕获和同步跟踪的过程,通过利用相邻波束的频率校正信道,在每一个TDMA帧中搜索频率校正信息,可以在较短时间内锁定频率和定时信息。通过MATLAB对算法进行了仿真,结果表明该算法能有效地解决载波快速捕获与精确跟踪的问题。
关键词:机载终端;相邻波束;多普勒频移;频率捕获跟踪
0引言
在机载卫星移动设备通信中,由于发送机和接收机之间快速的相对运动,使得接收信号遭受多普勒效应影响[1],其次,由于卫星功率的限制,信号强度不会很高,长距离的传输引入大量的噪声,信号会受到噪声的影响,给接收系统进行正确的接收和处理带来很大的麻烦。另外在飞机飞行姿态与飞行速度变化时,都会产生多普勒频移变化[2]。接收信号将存在一个不断变化的多普勒频偏。
本文所基于的系统采用GEO卫星进行通信,当机载终端以1 000 km/h的速度运行时,在3g的加速度下,多普勒频偏可以达到几千赫兹[3]。如此大的多普勒频偏变化会对信号解调过程造成极大的影响。因此,实现机载卫星通信终端的信号传输的关键点应为在较低信噪比、高动态的环境下的载波信号捕获和跟踪[4]。
1信号捕获
在信号捕获过程中,机载终端和手持/车载终端不同,其工作环境存在较大的多普勒频移,机载终端的动态变化,引起一段时间之内频率可能会出现较大的变化。系统定义单个波束中固定数量突发帧结构中只含有一个FCCH(频率校正信道)[5]。通过研究标准,可以搜索到当前波束以及相邻波束中的信息,利用波束七色复用(如图1所示),同时搜索相邻波束中的FCCH信道,实现每帧都搜索FCCH,而在每帧内,频率最大变化为4 Hz,这样相邻波束的频率信息在相对较小的频率变化后及时捕获频偏信息,进而完成频率和定时的初始捕获[6]。

图1 波束七色复用
频率校正突发(FCCH)采用chirp调制,若chirp信号表达式为:
x(t)=cos(πμ(t-T/2)2),
式中,chirp信号持续时间为(0,T),则chirp信号的扫频带宽为B=μT。
频率控制信道占用n个时隙,每个时隙m个符号周期,chirp信号持续m*n个符号周期,信道符号速率fs为16 ksps,其调制基带信号复包络定义为:
式中,p(t)是一个(-T/2,T/2)内为1、其余为0的单位矩形脉冲,μ=0.96/(120T2),chirp信号带宽B=μ*120T=0.96/T,T=1/fs=0.062 5ms,相应的,扫频带宽为15.36 kHz,即扫频范围为(-7.68 kHz,7.68 kHz)。可以完成机载终端最大的多普勒频移2.03 kHz的捕获[7]。
在初始频率捕获阶段,处理流程如图2所示,将接收信号与本地上下两路扫频信号相乘后再进行快速傅里叶变换(FFT),通过检测频域峰值位置的变化规律[8],即可估计出初始频率偏差。

图2 频偏初始捕获
chirp搜索判决条件:
① 上扫频支路计算出的峰值频率f1和下扫频支路计算出的峰值频率f2产生交叉,且交叉点前、后几对f1、f2满足斜率绝对值相等、符号相反;
② 交叉点处上、下扫频支路的峰值功率P1和P2比较接近,且交叉点前、后几对P1、P2值要分别小于交叉点处的P1、P2值。
同时满足以上两个条件,即认为捕获到chirp信号。按照图2中频偏初始捕获流程,设计出chirp搜索的实现框图如图3所示。本地上下扫频数据经过选通器(MUX)分别和采样数据相乘,进而通过FFT模块,平方和之后得到频谱峰值,设置观测窗口完成对chirp信号的搜索,得到频率偏移和定时偏移的信息。

图3 chirp搜索实现框图
频率校正突发信道处理完成后的频偏信息的精度为Ts*N/P*2,其中Ts为采样速率,N为采样倍数,P为FFT的点数。通过降低采样速率,或者适当增加FFT长度来获得一个更佳的频率分辨率和更高的抗噪性能(FFT的长度的变大会导致FFT的运算量有很大的增加),将初始捕获的频偏精度提高。
2载波同步跟踪
2.1频偏估计
频率偏差估计算法的原理就是对接收信号进行相应处理,可以得到含有载波频率偏差f0的信号,然后利用频偏估计算法再对该信号进行估计,从而得到频偏估计值。在机载卫星通信终端中,多普勒频移使得接收机信号中存在高动态的载波频率偏差[9]。为了实现载波相位的快速准确捕获,需要有一个频率跟踪环路辅助载波相位跟踪环路。在以往的载波频率跟踪环路或者载波频偏参数估计算法中,交叉噪声引入频率跟踪环路,使得频偏误差控制精度与输入信噪比之间存在很强的依赖性,其性能受到限制[10]。
本文提出一种快速傅里叶变换FFT载波频偏估计器算法,它无需辅助数据(NDA)就能直接检测得到载波频偏绝对值大小,当输入端信噪比大于一个门限时[11],其频偏估计值的误差精度只与频偏检测其设计参数有关,而与输入端信噪比无关,并且非常适合于FPGA实现。频偏估计过程如图4所示。

图4 频偏估计过程
2.2相位估计
由于噪声等因素的影响,经过频偏估计和校正之后的结果与实际的频偏有误差,使用上一个突发数据FFT频率估计后的频差信息,还剩下没有去掉的小频差。此时的较小的频偏相对与符号速率是个慢变化,可认为在短时突发信号中没有频偏,只有相偏,需要减少这个剩余的小频偏对性能的影响[12]。


算法介绍:载波相位恢复算法采用V&V算法,首先对数据进行M次方运算,BPSK进行2次方,QPSK进行4次方,8PSK进行8次方运算,完成后把数据暂存。进行估计载波瞬时相位运算,包括累加、平均、求角度,求出频差信息。与输入原始数据相乘。消除频差。
载波瞬时相位估计算法如下:① 每N个数据分为一段,对数据进行累加;(图5中N取16);② 前后两个数据进行差分相乘;③ 累加差分数据;④ 求角度;⑤ 角度截位处理,如果是M次方,N个数据累加,那么对计算出的角度值进行截位,截J位,其中J=log2(N*M)。

图5 相位估计流程
如图5所示,取N=16时,具体计算步骤为:
y=x2*(x1)*+x3*(x2)*+x4*(x3)*+……,


相应的FFT估计频差为:
式中,BCCH(X,N+j)表示第x波束N+j帧的BCCH信道,PCHy,N+j表示第y波束N+j帧PCH信道。
相位估计算法为:ΔφN=

式中,BCCHX,N+j,partk表示第x波束N+j帧的BCCH信道经过非线性变换后的第K段信号,PCHy,N+j,partk表示第y波束N+j帧PCH信道后的第K段信号,对4个相邻信道估计出的相位进行平均后得到相位估计值。
3仿真实现
本文的仿真模型是在MATLAB中建立的。仿真实验中采用的信道为240个符号长度,符号速率16 ksps,采样倍数为4倍采样。加入如表1中所示的最大多普勒频移和多普勒变化率。

表1 机载终端多普勒参数变化
如图6仿真结果所示,本文中算法可以完成机载终端的频率捕获和跟踪,算法的误比特率和理论值接近,满足系统对于信噪比门限和性能的要求。
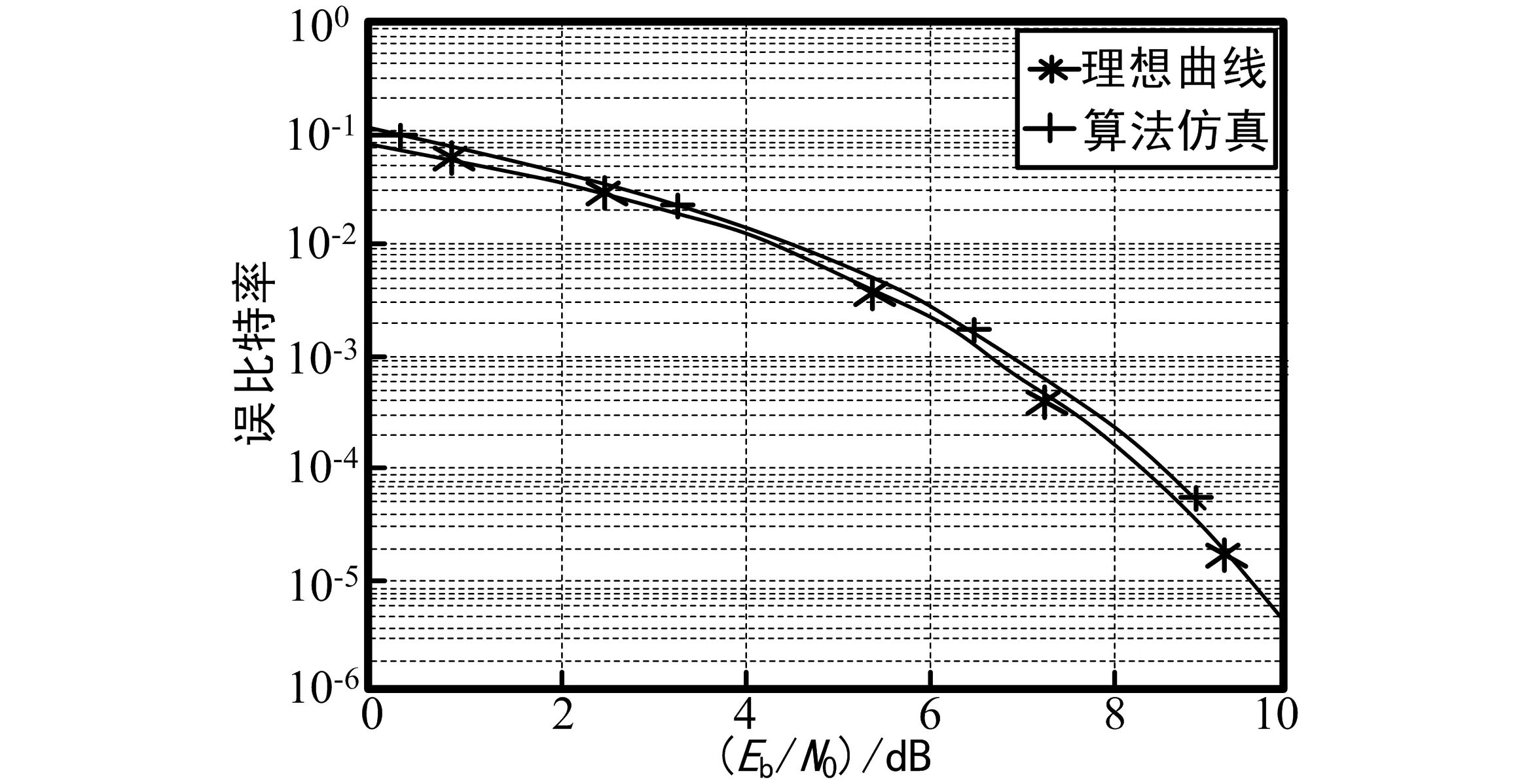
图6 算法和理论之间的误比特率比较
4结束语
针对机载终端工作环境的特殊性,结合系统特点,提出新的频率捕获和跟踪算法,充分利用系统相邻波束的频率校正信息,在较短的时间完成频率变化的捕获,通过在系统常用信道下的仿真实验,表明算法可以达到性能要求,从而完成终端的通信过程。
参考文献
[1]汪春霆,张俊祥,潘申富,等.卫星通信系统[M].北京:国防工业出版社,2012:242-279.
[2]余凡.卫星导航接收机载噪比估计方法研究[J].无线电工程,2011,41(8):28-30.
[3]孙志刚,周越,申冀湘.一种新型小型化宽带无人机机载智能天线研究[J].无线电工程,2013,43(5):42-44.
[4]Viterbi A J,Viterbi A M.Nonlinear Estimation of PSK-Modulated Carrier Phase with Application to Burst Digital Transmission[J].IEEE Trans.on Information Theory,1983,IT29(4):543-551.
[5]王力男.卫星通信系统中Chirp信号设计与捕获[J].无线电通信技术,2007,37(6):58-60.
[6]刘建林,陈兵.一种高精度单频信号频率估计算法[J].无线电工程,2011,41(4):26-28.
[7]Fast Fourier Transform MegaCore Function[EB/OL].http:∥www.altera.com.
[8]Noels N,Steendam H,Moeneclaey M,et al.Carrier Phase and Frequency Estimation for Pilot-Symbol Assisted Transmission:Bounds and Algorithms[J].IEEE Transaction on Signal Processing,2005,53(12):4578-4587.
[9]袁旭猛,王浩.机载天线电磁兼容技术分析[J].无线电通信技术,2011,37(4):40-42.
[10]陈宝林.小型化频率综合器技术分析[J].无线电通信技术,2013,39(3):67-68,96.
[11]杜燕,龚大亮,翟鸿飞.一种机动式时间频率传递系统设计与实现[J].无线电工程,2014,44(2):67-69.
[12]Michele Morelli.Doppler-Rate Estimation for Burst Digital Transmisson[J].IEEE Transaction on Communication,2002,50(5):707-710.
A Frequency Acquisition and Tracking Algorithm of Airborne Satellite Communication Terminal
DUAN Yong-cun,WANG Li-nan,PEI Wen-duan
(The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Abstract:As a special satellite communication equipment,the airborne satellite communication terminal operates in an environment very different from common communication terminals.Under the circumstances of high Doppler shift,it is difficult to achieve frequency acquisition and tracking in the process of communication.To solve the problem that airborne terminal’s Doppler frequency shift changes quickly in the process of communication,this paper presents a multibeam carrier frequency offset estimation algorithm.The process of frequency capture and synchronous tracking is described in detail.During this process,the algorithm searches frequency correction information of each TDMA frame by using the frequency correction channel of adjacent beam,in another word it can determine the initial frequency and timing information in a relatively short period of time.The algorithm is simulated by MATLAB,and the results show that it can effectively implement fast carrier acquisition and accurate tracking.
Key words:airborne terminal;adjacent beam;Doppler shift;frequency acquisition and tracking
中图分类号:TN929.5
文献标志码:A
文章编号:1003-3114(2016)03-33-4
作者简介:段勇存(1990—),男,在读研究生,主要研究方向:卫星移动通信调制解调。王力男(1968—),男,研究员,主要研究方向:卫星移动通信。裴文端(1964—),男,研究员,主要研究方向:卫星通信系统。
收稿日期:2016-02-26
doi:10.3969/j.issn.1003-3114.2016.03.09
引用格式:段勇存,王力男,裴文瑞.一种机载卫星通信终端频率捕获跟踪算法[J].无线电通信技术,2016,42(3):33-36.
