UVW平台在平板显示贴附类设备中的应用与研究
2016-06-06胡钦华衡利斌郭鹏杨成春
胡钦华,衡利斌,郭鹏,杨成春
(中国电子科技集团公司第二研究所,山西太原030024)
UVW平台在平板显示贴附类设备中的应用与研究
胡钦华,衡利斌,郭鹏,杨成春
(中国电子科技集团公司第二研究所,山西太原030024)
摘要:为了满足在平板显示贴附类设备中对高精度贴合的要求,设计了一种平面3-PRP型并联机构UVW工作平台,并对平台的自由度进行了分析,利用解析法给出了平台精确的运动学正反解模型,并在此基础上对平台产生误差的原因进行了深入分析。在平台的各种误差中,PRP支链的对心误差是导致运动学正反解误差的关键,是影响平台精度的主要原因。
关键词:贴附;视觉对位系统;UVW平台;并联机构;运动正反解;误差补偿
当前,国内平板显示产业的发展日新月异,其作为国家战略层面的新兴产业,得到了国家和政府的大力扶持。在国家经济结构调整的大背景下,平板显示产业又迎来了新的发展机遇。在平板显示器的制造过程中会多次用到贴附技术,贴附是将一种材料粘贴在另一种材料上的生产工艺,贴附质量的好坏对平板显示器的的性能影响很大,因此在贴附过程中都要求贴附位置与贴附角度偏差小,贴附材料不产生拉伸、扭曲、压伤、变形等特点。随着平板显示技术的发展,贴附材料正在向薄型化、高透光性和低柔韧性方向发展,传统的机械定位和光纤定位方式已不能满足生产的要求。近年来基于机器视觉的精密对位系统以其优异的性能得到了广泛的应用,视觉对位贴附技术就是基于光学、精密机械和精密控制发展而来的一种新型对位贴附技术,该技术因其定位精度高、响应速度快、工作稳定可靠而备受重视。
1 视觉对位系统的组成及工作原理
视觉对位系统一般由四部分组成:电机及其驱动、精密工作平台、CCD摄像头及图像采集卡、图像处理算法及控制软件。本文所述的视觉对位系统是指在平板显示行业TFT-LCD制程中,偏光片和玻璃基板贴合工艺所使用的对位系统,该系统的方案如图1所示。
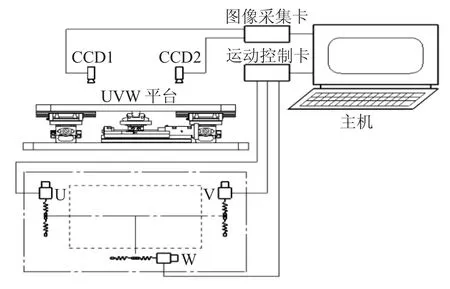
图1 对位系统示意图
其工作原理是:利用双CCD对偏光片边角特征和玻璃MARK点进行读取,通过图像处理系统与图形识别算法计算出偏光片和玻璃基板的中心坐标,再利用两中心坐标存在的差异计算出工作平台的移动量,最后通过控制U、V、W电机执行运动,达到偏光片与玻璃基板的中心重合对位,以实现偏光片和玻璃基板的精确贴合。在此系统中,高精度UVW平台的运用能更快速、更精确地达到对位要求,是本文的研究重点。
2 UVW工作平台的结构设计与分析
2.1工作平台的机械结构
在平板显示贴附类设备中,常用的机械工作平台主要有两种形式:XYθ平台和UVW平台。XYθ平台是最为常用的工作平台,它采用串联结构的设计思想,其优点是X、Y和θ都是独立的运动轴,可实现大尺度平移和大角度旋转,其缺点是平台响应速度慢、刚性低,并且对的小分辨率很难做到;UVW平台则采用平面并联结构的设计思想,其优点是响应速度快、刚性高、结构紧凑,可以实现微米级的定位精度,其缺点是工作空间小,并且在工作空间内存在奇异位形。
为了实现偏光片和玻璃基板的高精度贴合,我们设计了一种平面3-PRP型并联机构UVW工作平台,该型平台具有3个结构对称的支链形式,每个支链由一个移动副(P)连接安装基板、一个移动副(P)连接工作平台,两个移动副再通过一个转动副(R)相连,其机构如图2所示。
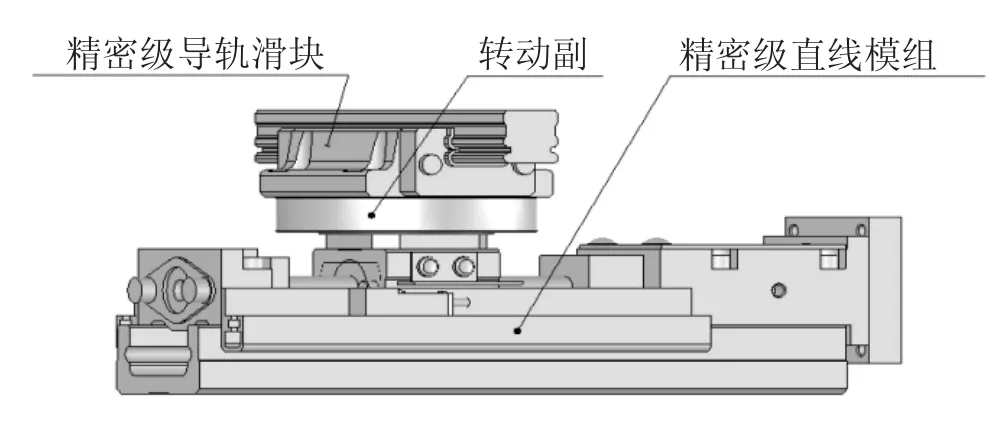
图2 PRP支链结构及组成图
根据上述设计思想,建立工作平台的三维模型,如图3所示。
采用矢量分析方法对3-PRP型并联机构运动学正反解进行求解,并基于雅克比矩阵对其速度和奇异性各向同性配置进行分析,结果表明3-PRP型并联机构在工作区域内无奇异位形,并可通过运动参数的调节提高运动精度。
2.2平面3-PRP型并联机构的自由度分析

图3 UVW工作平台三维模型图
要得到UVW工作平台的控制特性,我们需要对平台的自由度进行分析,本文采用的UVW机构实际上是一种特殊的平面3-PRP型并联机构,机构简图如图4所示。

图4 UVW机构简图
设在二维平面内,有n个完全不受约束的构件,且任意选定其中一个构件作为固定参照物。由于每个构件都有3个自由度,则n个构件相对于参照物共有3(n-1)个运动自由度。如将此n个构件,用m个约束数为1~3的运动副连接起来,组成平面机构,并设第i个运动副的约束数为pi,则该机构的自由度:
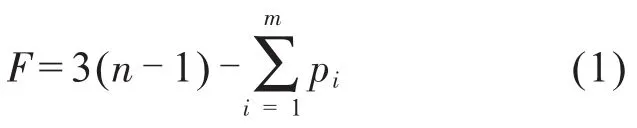
通常情况下,式(1)中的pi可以用3(n - fi)来替代,就成为一般形式的平面机构的自由度计算公式:

在平面3-PRP型并联机构中,机构的构件数n= 8,运动副数m=9,每个转动副有1个自由度,所以:
将上式代入(2)式,则有:

由以上计算可知,该机构的自由度为3。由于UVW平台为3个电机(U、V、W)驱动,驱动数目与自由度数目相等,则可证明UVW工作平台的运动唯一。
2.3平面3-PRP型并联机构的运动学反解模型
UVW工作平台在平板显示贴附类设备中的对位过程如下:
(1)将偏光片置于工作平台上,并使偏光片要检测的边角特征位于CCD的视野范围之内,确定边角特征的位置,并利用图像算法计算出偏光片的中心坐标。
(2)将玻璃基板置于工作平台上,并使玻璃基板的MARK点位于CCD的视野范围之内,确定MAK点的位置,并利用图像算法计算出玻璃基板的中心坐标。
(3)依据偏光片、玻璃基板的中心坐标的相对差值,利用图像处理算法计算出UVW平台的移动量(x,y,θ),以驱动电机运动,使偏光片和玻璃基板精准对位。
设θ以逆时针旋转为正,利用解析法分析平台的运动学特性,可得其运动学反解关系式为:
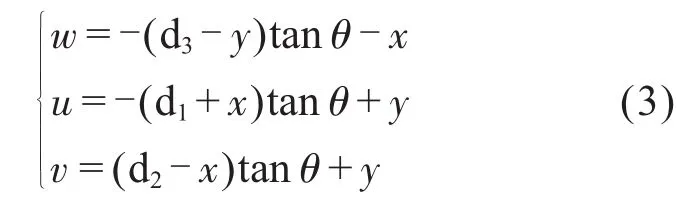

图5 并联机构运动关系简图
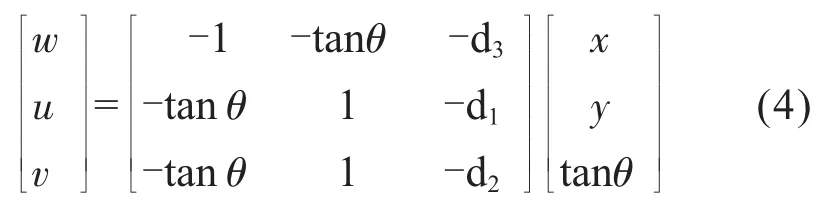
写成矩阵形式,则有:
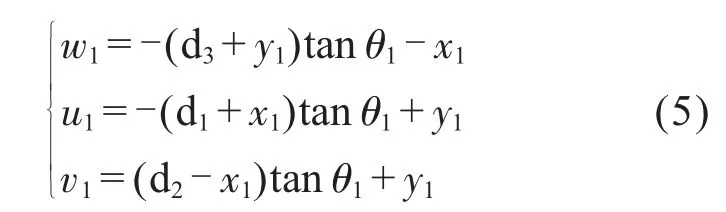
平台中心从(x0,y0,θ0)点运动到(x1,y1,θ1)点,则有:
平台中心从(x0,y0,θ0)点运动到(x2,y2,θ2)点,则有:

将(5)式和(6)式写成矩阵形式,并令:
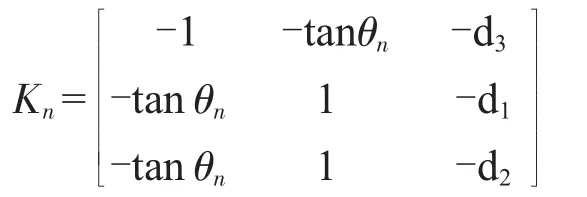
则有:
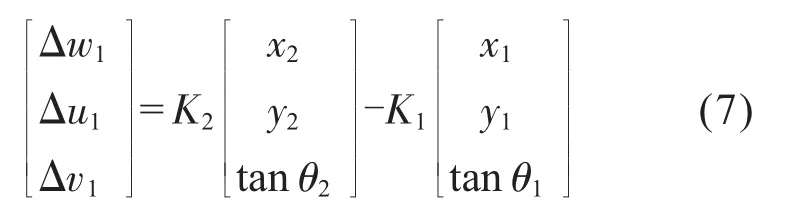
(7)式即为平面并联机构的反解模型,其中:Δu1、Δv1、Δw1为状态(x1,y1,θ1)运动到状态(x2,y2,θ2)时相应的U、V、W部分运动的距离。
2.4平面3-PRP型并联机构的运动学正解模型
当U、V、W三电机运动时,对应不同的(u,v, w),则有相应的状态(x,y,θ),平台运动到对应的位置。对于平面3-PRP型并联机构,建立运动学正解关系式:

写成矩阵形式,则有:

(9)式即为平面3-PRP型并联机构的反解模型,对(9)式进行分析可知:该型并联机构的正解模型是一个复杂的时变系统,它是进行误差分析与误差补偿的基础。
3 UVW工作平台的误差分析及误差补偿
3.1UVW工作平台的误差分析
由UVW工作平台在平板显示贴附类设备中的对位过程可知,由于系统的非线性,工作平台移动后,并不能完全补偿偏光片和玻璃基板的中心坐标的位置误差,和实际位置比较的结果就是UVW工作平台的对位误差。
进一步对UVW工作平台的误差来源进行分析:
(1)图像处理系统误差。图像处理系统是由照明系统、光学成像系统、CCD摄像系统、图像采集卡、硬件接口、计算机硬件及图像处理软件等软硬件组成的复杂系统。因此影响机器视觉系统精度的因素也来自多方面。由于偏光片的边角特征和玻璃基板的MARK点在读取过程中,图像处理系统误差虽然是客观存在的,但在比较计算环节会形成消减,致使图像处理系统误差影响减弱。
(2)平台系统误差。平台系统误差包括:由于机构热变形误差与承载变形误差引起的平台与工件作用点上的相对位置偏差;由于伺服系统跟踪误差、进给传动误差和位置检测误差等引起的位移偏差。在平板显示贴附类设备中,由于UVW工作平台所承受的载荷较小,并且工作在恒温恒湿的10 000级洁净厂房中,平台所受承载变形和热变形可忽略不计,所以平台的系统误差也较小。
(3)平台的制造安装误差。平台的制造安装误差主要有机构的原始误差、制造误差和装配误差组成。由于关系到UVW工作平台的正反解模型,是误差产生的关键原因。
(4)软件系统误差。在图像处理、特征和MARK点读取和坐标转换过程中,由于运算精度、算法误差等的存在也会一定程度上影响UVW工作平台的对准精度,是误差产生的另一个关键原因。
3.2PRP支链的对心误差
UVW工作平台3个PRP支链的对心误差是导致运动学正解误差的关键。该误差很难通过加工和装配完全消除,因此需要研究一种算法对误差进行校正补偿。
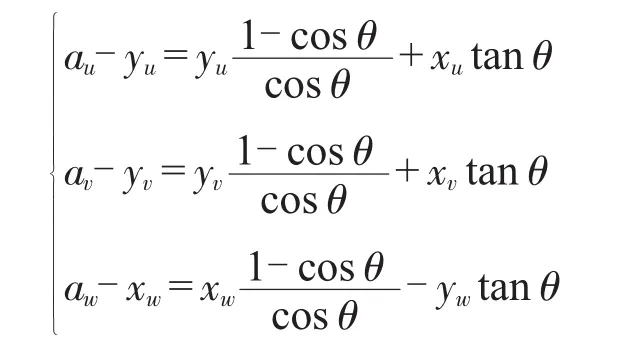
由于对心误差的存在,使得下模组在U、V、W方向的移动不能完全传递到工作平台。对存在对心误差的UVW工作平台建立如图6所示的数学模型。其中xu、yu,xv、yv,xw、yw分别表示U、V、W 3个PRP支链在x方向和y方向的制造装配误差。
利用解析法对图6进行求解,可以得到:

其中θ为平台的转角,这样可以获得U、V、W3个方向的移动误差u'、v'和w'为:
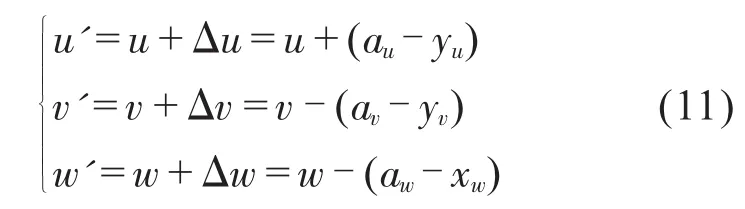
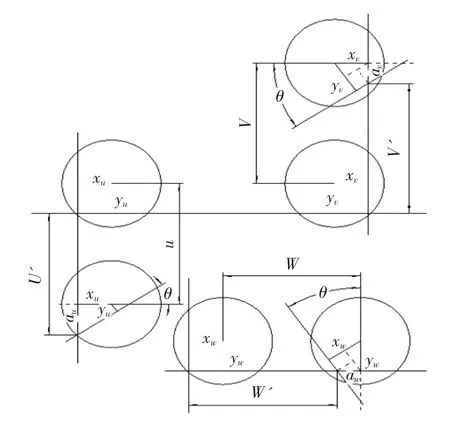
图6 UVW工作平台对心误差分析图
对误差做进一步的分析,可知:
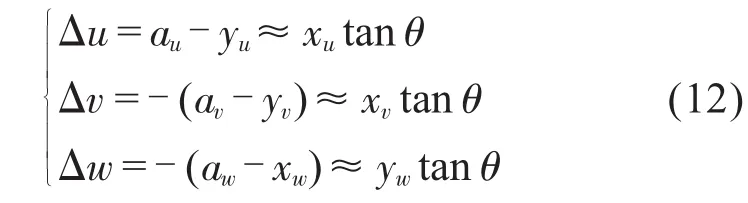
将(12)式代入(11)式,即可得出U、V、W 3个PRP支链在对心误差存在的情况下的u'、v'、w'的表达式为:
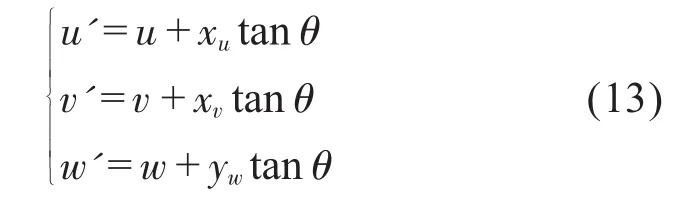
从以上分析可知,在U、V关节上,x方向的误差起主导作用,而X关节上y方向上的误差起关键作用。
3.3UVW工作平台的误差补偿
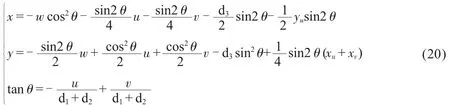
将(13)式代入(8)式,可以得到PRP支链在存在误差的前提条件下的正解表达式如下:
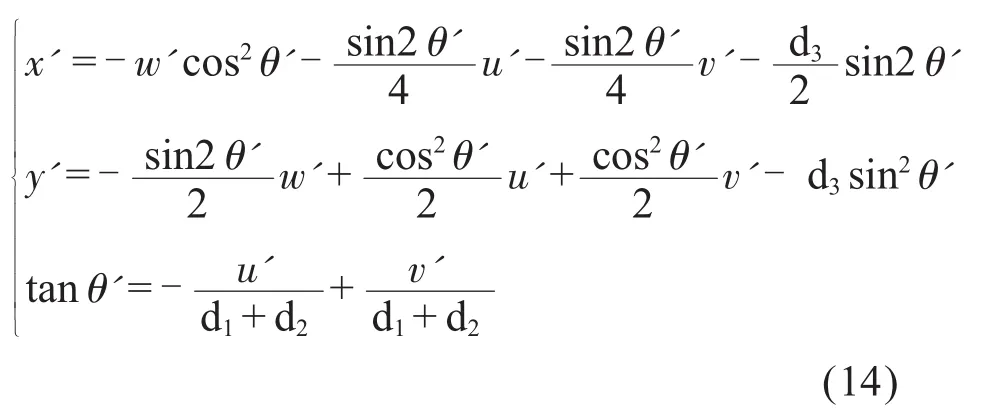
把(13)式中的u'、v'代入(14)式中的第三式可得:


由(16)式可得:θ'≈θ
我们用u'、v'、w'代入(14)式中的x'、y',就可以获得PRP支链在存在误差的前提下的正解运动结果和无补偿正解运动结果的误差值Δx、Δy为:
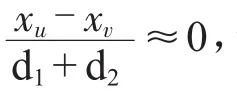
由于xu、xv、yw均为很小的量,则可省去高级无穷小量sin2θ,于是(17)式又近似于:

由(18)式可知:正解x方向上的误差主要由W支链y方向的误差引起,而正解y方向的误差主要由U、V支链x方向的误差和引起。
在θ≤±5°时,设xu=xv=yw=t,由(18)式可知:Δx=Δy。当平台转角θ=5°,t取不同值时,代入(18)式可得表1;当θ=1°时,同样的方法可得表2。

表1 θ=5° mm

表2 θ=1° mm
分析表1、表2中的数据可知,在排除视觉对位系统其它误差的前提下,如若平台的旋转角度能控制在UVW以内,且PRP支链的对心误差能控制在0.05mm以内,工作平台的精度则可达到5 μm以内;如若平台的旋转角度能控制在1°以内,且PRP支链的对心误差能控制在0.05 mm以内,则UVW工作平台的精度可达到0.5 μm以内。
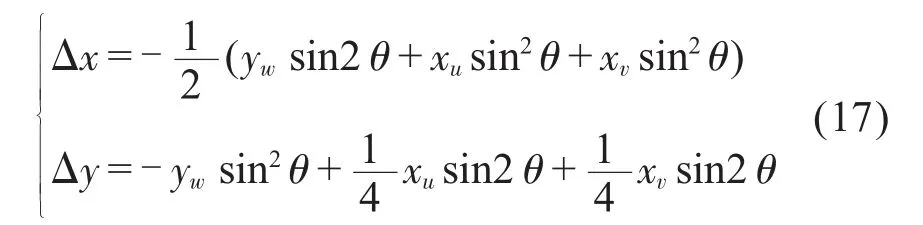
为了获得xu、xv、yw,让uvw工作平台输出一个uvw偏移量,通过CCD计算出实际的x1、y1、θ1值,同时采用精确的运动学正解表达式计算出理论x2、y2、θ2值,这样可以获得二者的差值Δx = x1- x2, Δy = y1- y2,取代入式(18)可以计算出yw和xu+xv,如下:
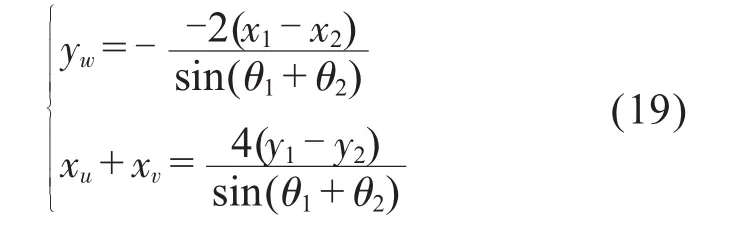
这样就可以给出PRP支链在存在误差的前提下UVW工作平台的正解表达式为:
其中u'、v'、w'通过反解关系式(3)计算而得。
4 结 论
本文给出了视觉对位系统的一般组成,重点研究了平面3-PRP型并联机构UVW对准平台,并对平台的自由度进行了分析,证明了平台运动的唯一性;给出了平台精确的运动学正反解模型,并在此基础上对平台产生误差的原因进行了深入的分析;在平台的各种误差中,PRP支链的对心误差是导致运动学正反解误差的关键,是影响平台精度的主要原因,在深入分析PRP对心误差的基础上给出了误差补偿的公式。
在平板显示贴附类设备中使用的对位系统,是以PRP对心误差控制在0.05 mm以内为前提讨论的,结果显示对准误差能控制在5 μm以内,该精度能很好的满足贴附设备对高精度贴合的要求。在提高机械结构精度和采用预定位减小平台转角的情况下,平台精度还可进一步提高。
参考文献:
[1]王伟丽,范光照,刘玉圣.基于共平面二维工作平台的精密测量系统[J].中国计量学院学报,2005,16(4):264-267.
[2]杨青,裴仁清.精密对位系统中共平面UVW工作平台的研究[J].机械制造,2007,45(7):39-41.
[3]武忠祥. UVW平台及其视觉对准系统研究[D].上海:上海大学硕士学位论文,2008.
[4]范春辉,何广平.三自由度冗余驱动平面并联机构的运动学分析[J].机械制造,2006,44(4):29-31.
胡钦华(1982-),男,河南商丘人,工学学士,工程师,主要从事电子专用设备的研发工作。
业界要闻
The Research and Application of UVW Platform in Attached Equipment of the Flat Panel Display
HU Qinhua,HENG Libin,GUO Peng,YANG Chengchun
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
Abstract:In order to meet the requirements of high precision fitting attached equipment in the flat panel display,a kind of UVW working platform of 3-PRP parallel mechanism of plane was designed,and the degree of freedom of the platform were analyzed,and the analytical model of kinematics of the positive and negative was give by analytical method,the errors of the platform are analyzed in depth based on former research.In all kinds of errors of the platform,the central error is the key to the error of positive and negative solution of kinematics in the chain of PRP,which is the main reason of the platform precision.
Keywords:Attachment;Vision-based alignment systm;UVW platform;Parallel mechanism;Positive and negative solutions of motion;Error compensation
中图分类号:TN605
文献标识码:B
文章编号:1004-4507(2016)05-0029-07
收稿日期:2016-04-15
作者简介: