坡度和粗糙度对ICESat-GLAS回波特征及其光斑脚点高程误差的影响研究
2016-06-05吴红波,郭忠明,陈安安,贺建桥
吴 红 波,郭 忠 明,陈 安 安,贺 建 桥
(1.陕西理工大学历史文化与旅游学院,陕西 汉中 723000;2.中国科学院青藏高原研究所,北京 100101:3.中国科学院青藏高原地球科学卓越创新中心,北京 100101;4.南京晓庄学院环境科学学院,江苏 南京 211171;5.中国科学院寒区旱区环境与工程研究所冰冻圈科学国家重点实验室,甘肃 兰州 730000;6.中国科学院大学,北京 100049)
坡度和粗糙度对ICESat-GLAS回波特征及其光斑脚点高程误差的影响研究
吴 红 波1,2,3,郭 忠 明4,陈 安 安5,6,贺 建 桥5
(1.陕西理工大学历史文化与旅游学院,陕西 汉中 723000;2.中国科学院青藏高原研究所,北京 100101:3.中国科学院青藏高原地球科学卓越创新中心,北京 100101;4.南京晓庄学院环境科学学院,江苏 南京 211171;5.中国科学院寒区旱区环境与工程研究所冰冻圈科学国家重点实验室,甘肃 兰州 730000;6.中国科学院大学,北京 100049)
为评价ICESat-GLAS数据在青藏高原地区冰川表面高程变化中的不确定性,采用GLA01产品和GLA14产品,基于SRTM DEM数据所派生的冰川区和非冰川区表面坡度、粗糙度数据,利用多元线性回归关系模型分析了表面粗糙度、坡度对GLAS光斑脚点高程的不确定误差。结果表明:当GLAS光斑脚点坡度小于10°时,GLAS光斑脚点高程偏差为0.1 m,且高程偏差随着坡度的增加而增大。在受坡度和粗糙度影响复杂地形下,GLAS光斑的回波展宽较大,不确定性偏差为0.3 m。此外,冰川区GLAS光斑脚点高程误差可通过高斯滤波进行展宽偏差校正,但当冰川表面坡度大于45°时,相应的GLAS光斑脚点高程在冰川表面高程变化估算中不可用。在后续的研究中,需考虑冰川运动、GLAS回波在冰雪表面渗透对冰川DEM高程精度以及GLAS光斑脚点水平位移的高程偏差影响。
ICESat-GLAS;坡度;粗糙度;回波特征;高程;不确定性
0 引言
气候变暖导致全球大多数山地冰川正面临全面退缩[1],青藏高原山地冰川的融水为周边地区河流水源提供重要补给[2]。冰川-气候系统的物质质量-能量交换不仅能够清晰地反映气候变化趋势[3],而且冰川物质消融也影响着区域水资源储量[4]、河流径流[5]、湖泊水位等变化[6]。因此,青藏高原地区山地冰川物质平衡变化研究作为全球冰川变化研究的重要组成部分,已成为全球气候系统中重要的监测对象和研究内容[7]。目前,冰川物质平衡估算方法有:花杆实地观测、能量物质平衡模型、时变重力场法[8]和雷达测高方法[9]。近30年来,星载雷达测高技术得到了迅速发展,测高资料被广泛应用于地表高程变化、卷云厚度[10]、海平面上升、植被结构参数估算[11]。其中2003年1月13日NASA在美国发射了冰、云和陆地高程卫星(ICESat),搭载了高精度地球科学激光高度计系统GLAS(Geo-Laser Altimeter Science),其ICESat-GLAS资料的测高精度可达厘米级[12],被运用于较大空间尺度上的冰川物质平衡和湖泊水位变化估测[13]。
随着卫星定轨精度和数据处理方法的改进,GLAS资料在估算冰盖物质平衡[14]、湖泊水位和偏远山区的地形模型推导的结果表明,GLA12产品在南极冰盖表面高度估值偏差变化率为2 cm/a,地表验证精度≤25 cm[15]。在未考虑水面波幅、浮冰和湖盆对湖泊水位干扰的情况下,湖泊水位不确定性为±0.15 m[16-18]。在GLAS光斑脚点高程数据估算冰川表面高程变化研究中,通过GLAS光斑轨迹星下点偏移校正可提高在丘陵地形下GLAS光斑脚点高程与冰面DEM高程的配准精度[19]。GLAS光斑脚点高程偏差不仅考虑回波在冰雪表面渗透深度[20],还需考虑冰雪密度的异质性和冰川动力学参数(坡度、坡向、粗糙度和冰川运动速率等)的影响[21]。
目前,GLAS资料具有较高的测高精度、较强的抗干扰性和良好的覆盖能力,足以弥补冰川观测台站的监测时段不连续和空间分布不均衡性[22]。在ICESat卫星升/降轨道的星下点交叉分析和重叠光斑脚点坡度校正中[23],仍缺少地表粗糙度、坡度对GLAS光斑脚点高程的误差分析。为此,本文分析了GLA01和GLA14产品在山地冰川表面高程变化中的不确定性,基于地表粗糙度、坡度对GLAS光斑脚点高程的理论模型推导,并以青藏高原西昆仑山区的GLAS光斑脚点高程与地表坡度、粗糙度研究所引起的高程偏差进行多元线性回归分析,期望其研究结果对山地冰川物质平衡监测和地形调查提供参考。
1 ICESat-GLAS测高资料与方法
1.1 地表高程测量原理
ICESat卫星从2003年2月21日-2009年10月11日共完成18期GLAS资料收集。GLAS测高仪是根据卫星发射器发射和接收脉冲的时间差测定卫星到地表的距离,并对地表高程进行估算[24]:
Hg=Hellipsiod-Halt-He-N
(1)
式中:Hg为地表高程;Hellipsiod为GLAS测高仪的参考椭球高;Halt为GLAS测高仪运行高度; He为仪器偏置、潮汐和大气延迟等修正误差;N为大地基准面相对于参考椭球面高度;也包括WGS84椭球体和Topex/Poseidon椭球体的高程差,约0.7m。本文采用360阶EGM2008重力场模型描述卫星测高数据在青藏高原地区的重力位异常和垂线偏差,格网大小20′×20′,未考虑海潮、逆气压的影响。
1.2 GLAS数据简介
GLAS测高仪采用的是绿光543nm和近红外1 064nm处激光脉冲测量地表特征,在平地上形成一个直径近似70m的圆形光斑,沿升/降轨道方向上的GLAS光斑脚点间隔约170m[25],重访周期为33~91d[26]。测高仪每秒发射40个激光脉冲,脉冲宽度为4ns,1ns的脉冲对应于0.15m的高度。测高仪的采样器数字化地物反射电压值,并以回波形式记录在GLA01产品中;利用GLA01回波反射特征和脉冲到达地物表面上的时间差对地物分类和地物高度变化进行估计[27]。本文Level1B级GLA01和GLA14产品的数据版本分别为33、34,青藏高原冰川区有效GLAS光斑共计149 996个,可从美国国家冰雪数据中心NSIDC(NationalSnowandIceDataCenter,URL:http://nsidc.org/data/icesat/)获取,并由美国戈达德宇航中心(NASA′sGoddardSpaceFlightCenter,GSFC)的ICESat科学研究处理小组I-SIPS(ICESATScienceInvestigator-ledProcessingSystem)进行管理[28]。其中,GLA01产品包含GLAS后向散射回波特征参数、地形坡度、粗糙度等信息,GLA14产品包括光斑脚点高程、经度、纬度、大地水准面高度、光斑记录号、日期、UTC时间等变量,可借助GLASVisualizer(idl_visualizer_20140604)和GLASAltimetryelevationextractorTool(ngat-0.15)提取,并以ASCII格式存储[29]。本研究采用90m×90m空间分辨率的SRTMDEMv4.1资料与GLA14产品中光斑脚点高程配准,由美国太空总署(NASA)和国防部国家测绘局(NIMA)联合提供,下载网址http://srtm.csi.cgiar.org/。
1.3 GLAS光斑回波特征
ICESat卫星测高仪不仅利用激光脉冲从发射器到地球表面,返回到接收器的时间差估计星地距离,而且还可获取地表地物回波特征信息。GLAS测高仪到地面的距离d为:
(2)
式中:c为光速常数,c=299 792 458m/s;Δt是激光脉冲发射和接收时间差[30]。
在没有前向散射的云层影响下,裸地表面上GLAS回波为单峰的高斯曲线(图1),波峰的数量取决于地表覆被和地形影响。在冰裂缝、冰峭壁、冰沟、冰痕等表面,每个完整GLAS回波中有2个或多个峰值。那么,GLAS回波可定义为[31]:
(3)
(4)
式中:Wm为第m个高斯波峰的贡献;N为一个完整GLAS回波中的波峰数;Am为第m个波峰振幅高度;ε为回波随机误差;tm为第m个波峰峰值处所对应的时间;σ为第m个峰值的标准偏差。

图1 高斯函数和半峰宽
每个完整的GLAS回波曲线w(ti)可表示为:
(5)
式中:w(ti)由544个光电压值组成,记录在GLA01产品中,平地上、坡度和粗糙度表面所对应的GLAS回波见图2。vi为GLAS回波中光电压值,vm为第m个波峰峰值处光电压值。


图2 GLA01产品的532 nm处的反射率回波曲线
1.4 地表坡度和粗糙度所引起的偏差
坡度和粗糙表面的各向异性、空间连续性常用于地形因子模型推导[33],本文借助中国科学院计算机网络信息中心的地理空间数据云平台(URL:http://www.gscloud.cn/),计算出SRTM DEM的地形粗糙指数(Terrain Ruggedness Index)和坡度值。
1.4.1 坡度校正 GLAS回波脉冲宽度可用来描述激光光斑内地物高度和地形坡度所引起的光斑脚点高程偏差[34]。平地上的GLAS光斑覆盖面积与SRTM DEM像元面积的重叠面积达47.48%,GLAS光斑脚点高程与DEM像元高程近似。为了评估地形坡度所引起的高程配准误差[35],将SRTM DEM像元分解为3×3亚像元,SRTM DEM像元高程为亚像元高程值Pij的线性加权均值(图3),SRTM DEM高程与GLAS光斑脚点高程的配准误差eco-registered可表示为:
(6)
式中:ei为第i个SRTMDEM亚像元与GLAS光斑脚点配准误差,i=1,2,3,…,9;SRTMDEM亚像元空间分辨率为30m×30m。

图3 GLAS光斑与SRTM DEM像元分析
在粗糙度近似为零的坡面上,GLAS光斑脚点坡度可用坡面的x、y方向上的展宽距离描述为:
(7)

(8)
1.4.2 粗糙度 地表粗糙度是地表单元的表面积与其在水平面上的投影面积之比[36],GLAS光斑内的地表粗糙度Δξ的近似求解公式为[37]:
Δξ≈1/cos(sfootprint)
(9)
式中:GLAS光斑脚点坡度sfootprint可用SRTMDEM的坡度值s近似替代,但凹凸地形分布及变化误差受分析窗口和空间尺度影响较大[38]。由于冰雪粗糙度值对识别冰川表面地物类型(裸冰、积雪、粒雪等)缺少充分的统计方法,需建立地面粗糙度观测值与GLAS回波偏差的拟合关系式[39]。
1.4.3 粗糙度校正 对任意一个GLAS光斑内的激光脉冲入射表面模型可描述为[40]:
(10)

假设激光脉冲的延迟是脉冲中心到相位波前的曲率所致的延迟[41],其GLAS回波展宽为:
(11)
式中:Tp为光斑脚点展宽时间(s);f为光束天顶角(rad);sx和sv分别为在水平平面坐标系中x、y方向上的坡度(rad);qr为激光束发散角度的1/2(rad);Δfx和Δfv分别为激光束在x、y方向上的随机偏差。

图4 表面坡度、粗糙度变化所对应的GLAS回波波形(No.937048640)
考虑表面粗糙度、坡度、天顶角、光束曲率和系统随机误差的影响,每束激光脉冲的均方根脉冲宽度可表示为:
(12)
式中:sp、sl分别是接收、发射脉冲宽度(ns),sh是接收器的脉冲响应(1个或多个)的宽度(ns)。
对于表面粗糙的平地,即sfootprint=0,式(10)可简化为:
(13)
相应的sx=sy=0,则式(13)表示为:
4H2alt×tan2qrc2×cos2f[tan2qr+tan2f]
(14)
若忽略GLAS测高仪的天顶角f和光束发散角qr,则式(14)简化为:
(15)
平地上的GLAS光斑内地表粗糙度适用于下式:
(16)
对于表面粗糙度较大的GLAS光斑,表面粗糙度和坡度是相互关联的[35]。对于表面光滑的GLAS光斑脚点,Δξ=0、f≈0,则式(14)变为:
(17)
由于GLAS光斑脚点坡度sfootprint与x、y矢量方向上的坡度关系为:
tan2sfootprint=tan2sx+tan2sy
(18)
若忽略GLAS激光脉冲天顶角变化的影响,则式(14)为:
(19)
(20)
1.5 不确定性误差
GLAS测高资料的随机误差是非线性的,对于任意工作期内的GLAS光斑脚点高程的总体误差P可表示为[42]:
P=Eco-registered+Ecampaign+Ebias=
1n×∑ni=1eco-registered+1l×∑l=18l=1ecampaign+1p×∑pi=1ebias
(21)
式中:Eco-registered为任一期GLAS光斑脚点高程和SRTMDEM高程之间的配准误差均值。Ecampaign是每个激光发射器工作期间的系统偏差,l=1,2,3,…,18。Ebias是表面坡度和粗糙度所引起的GLAS回波的标准偏差均值,通过GLAS回波高斯曲线的误差概率函数与粗糙度经验分布偏差估算得到。eco-registered、ecampaign、ebias分别为任意一个GLAS光斑脚点与SRTMDEM像元的高程配准误差、系统误差和复杂地形所导致的不确定性误差。
2 结果与分析
2.1 GLAS光斑脚点高程误差分析
随着ICESat卫星运行时间的推移,GLAS资料的2003-2009年各期系统偏差与运行时间呈线性相关关系,复相关系数R2=0.8589,通过95%置信区间检验;且系统偏差变化率为2~3cm/a(图5)。在冰川表面高程估计中,需根据18期GLAS光斑脚点高程的系统偏差统计,将各期系统偏差变化率值逐一补偿到GLAS光斑脚点高程中。
分析青藏高原冰川区149 996个有效GLAS光斑可知(图6,彩图见封2),在坡度≤10°的非冰川区域,GLAS光斑脚点高程与DEM的配准误差为0.1m,且配准误差会随着坡度的增加而变化。在坡度和粗糙度共同影响复杂地形下,GLAS光斑的回波展宽较大,通过GLAS回波偏差与坡度经验统计公式校正,冰川区GLAS光斑脚点高程与SRTM DEM高程的配准精度为0.3 m,这与GLAS光斑轨迹与GPS动态轨迹交叉分析验证结果一致[43]。此外,ICESat卫星轨道高度和卫星姿态调整,会系统性地引起各期的光斑脚点位移量7~10 m[44]。

图5 2003-2009年18期GLAS光斑脚点高程的系统偏差

图6 青藏高原地区冰川表面GLAS光斑与SRTM DEM的配准误差
青藏高原山地冰川表面运动、平均海拔和冰雪密度时空特征差异,会使GLAS资料在冰川表面高程变化和冰川物质平衡计算产生一定低估影响。为描述表面坡度、粗糙度对GLAS脚点高程偏差的关系,本文选择青藏高原西昆仑冰川地区的GLAS光斑数据和地形坡度、粗糙度进行分析;据式(16)可知,GLAS光斑内下凹地表的粗糙度用负值表示,凸起地表的粗糙度用正值表示(图7,彩图见封2)。
2.2 坡度与光斑脚点高程偏差关系
随机选取冰川区239个GLAS光斑,其中189个光斑脚点坡度sfootprint≤20°,50个光斑的脚点坡度20°

图7 青藏高原西昆仑山冰川表面GLAS光斑与SRTM DEM的坡度、粗糙度分布

图8 GLAS光斑内地表坡度与GLAS回波不确定误差关系
分析非冰川区的1 205个GLAS光斑脚点高程偏差和脚点坡度变化拟合曲线可知,GLAS光斑脚点的高程偏差与坡度值呈线性相关关系,且随着GLAS光斑脚点坡度值增加而增大(图9)。当GLAS光斑处于升轨道上,GLAS光斑脚点的垂直高程偏差为正偏差,且与脚点坡度呈正相关;当GLAS光斑脚点轨迹处于降轨道上,GLAS光斑脚点的垂直高程偏差为负偏差,且与脚点坡度值呈负相关。
2.3 地表粗糙度与光斑脚点高程偏差关系
当冰川末端、表碛物、冰沟和河道边缘处的坡度>45°时,该处粗糙度值也会相应迅速增大[47](图7c)。
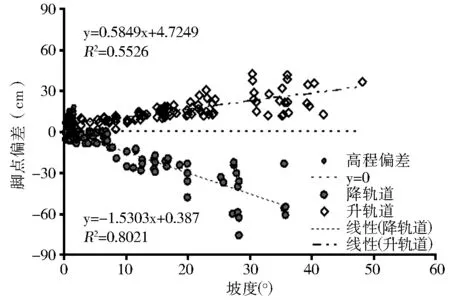
图9 GLAS光斑脚点坡度与垂直方向上的偏差关系曲线
根据青藏高原西昆仑山区裸地的1 205个随机GLAS光斑高程偏差ebias和其粗糙度统计分析可知,1.01≤Δξ<2.2时,由粗糙度所导致的回波偏差ebias随着地表粗糙度的增加而增加,呈散射状(图10)。当GLAS光斑内Δξ>2.2时,垂直误差可达±0.5 m。与植被、碎石、河沟、农田等地表所不同的是,冰川区冰雪表面粗糙度数值偏小,范围在1≤Δξ<1.5,冰雪表面粗糙度所导致的GLAS回波展宽较小,其高程偏差采用式(20)进行校正。

图10 表面粗糙度与GLAS光斑脚点高程偏差关系
3 结论
本文对比分析了冰川区和非冰川区地形坡度、粗糙度变化对GLAS光斑脚点的高程偏差,并评估了GLAS测高资料在青藏高原山地冰川高程变化估计中的不确定性,主要结论如下:1)检验了GLAS光斑脚点高程在青藏高原山地冰川表面的总体误差为0.3 m;当GLAS光斑脚点坡度≤10°时,脚点高程偏差为0.1 m。2)GLAS测高资料地表面高程偏差主要源于坡度和粗糙度影响,对于冰雪表面粗糙度近似等于1的GLAS光斑,光斑脚点高程偏差随表面坡度的增加而增加,呈线性递增。在非冰川覆盖山区,粗糙度所引起的GLAS回波展宽,可通过高斯滤波降低粗糙度所引起的高程偏差;在粗糙度和坡度值均较小的冰川表面高程变化估计中,GLAS光斑可通过拟合回归关系式进行修正,降低光斑脚点高程偏差。3)考虑GLAS光斑各期之间的系统偏差和配准误差,GLAS数据覆盖了各种地形条件下的冰川表面类型,且精度满足冰川物质平衡估算要求,但与实测样地数据尚有一定偏差。在后续的研究中,需考虑冰川表面运动、GLAS回波的冰雪渗透深度对冰川DEM高程精度评价和水平方向的位移补偿偏差,其研究结果可为偏远的山地冰川表面高程变化和物质平衡监测提供参考。
致谢:美国冰雪数据中心NSIDC(National Snow and Ice Data Center)提供的GLAS数据和International Agriculture Research-Consortium for Spatial Information (CGIAR-CSI)提供SRTM DEM v4.1数据,及中国科学院寒区旱区环境与工程研究所科考人员的野外工作协助,在此感谢!
[1] BENISTON M,DIAZ H F,BRADLEY R S.Climatic change at high elevation sites:An overview[J].Climatic Change,1997,36(3-4):233-251.
[2] KANG E S,LIU C H,XIE Z C,et al.Assessment of glacier water resources based on the Glacier Inventory of China[J].Annals of Glaciology,2010,50(53):104-110.
[3] YAO T D,THOMPSON L,YANG W,et al.Different glacier status with atmospheric circulations in Tibetan Plateau and surroundings[J].Nature Climate Change,2012,2(9):663-667.
[4] MCKENZIE J,MARK B,THOMPSON L,et al.A hydrogeochemical survey of Kilimanjaro (Tanzania):Implications for water sources and ages[J].Hydrogeology Journal,2010,18(4):985-995.
[5] IMMERZEEL W W,BIERKENS M F P.Asia′s water balance[J].Nature Geoscience,2012,5(12):841-842.
[6] ZHANG G Q,YAO T D,XIE H J,et al.An inventory of glacial lakes in the Third Pole region and their changes in response to global warming[J].Global and Planetary Change,2015,131:148-157.
[7] BAMBER J L,RIVERA A.A review of remote sensing methods for glacier mass balance determination[J].Global and Planetary Change,2007,59(1-4):138-148.
[8] MATSUO K,HEKI K.Time-variable ice loss in Asian high mountains from satellite gravimetry[J].Earth and Planetary Science Letters,2010,290(1-2):30-36.
[9] ZWALLY H J,SCHUTZ B,ABDALATI W,et al.ICESat′s laser measurements of polar ice,atmosphere,ocean,and land[J].Journal of Geodynamics,2002,34(3-4):405-445.
[10] EGUCHI N,YOKOTA T,INOUE G.Characteristics of cirrus clouds from ICESat/GLAS observations[J].Geophysical Research Letters,2007,34(9):L09810.
[11] 邢艳秋,王立海.基于ICESat-GLAS完整波形的坡地森林冠层高度反演研究——以吉林长白山林区为例[J].武汉大学学报(信息科学版),2009,34(6):696-700.
[12] 王亚凤,温家洪,刘吉英.Amery冰架DEM及其海洋冰分布研究[J].地理与地理信息科学,2007,22(6):71-74.
[13] WU H B,WANG N L,JIANG X,et al.Variations in water level and glacier mass balance in Nam Co lake,Nyainqentanglha range,Tibetan Plateau,based on ICESat data for 2003-2009[J].Annals of Glaciology,2014,55(66):239-247.
[14] 黄华兵,程晓,宫鹏.基于星载激光雷达和雷达高度计数据的南极冰盖表面高程制图[J].遥感学报,2014,18(1):117-125.
[15] WEBB C E,JAY Z H,ABDALATI W.The Ice,Cloud,and Land Elevation Satellite (ICESat) Summary Mission Timeline and Performance Relative to Pre-Launch Mission Success Criteria[R].NASA Goddard Space Flight Center,2013.
[16] WANG N L,WU H B,WU Y W,et al.Variations of the glacier mass balance and lake water storage in the Tarim Basin,northwest China,over the period of 2003-2009 estimated by the ICESat-GLAS data[J].Environmental Earth Sciences,2015,74(3):1997-2008.
[17] ZHANG G Q,XIE H J,KANG S C,et al.Monitoring lake level changes on the Tibetan Plateau using ICESat altimetry data (2003-2009) [J].Remote Sensing of Environment,2011,115(7):1733-1742.
[18] PHAN V H,LINDENBERGH R,MENENTI M.ICESat derived elevation changes of Tibetan lakes between 2003 and 2009[J].International Journal of Applied Earth Observation and Geoinformation,2012,17:12-22.
[19] RASTOGI G,AGRAWAL R,AJAI.Bias corrections of CartoDEM using ICESat-GLAS data in hilly regions[J].GIScience & Remote Sensing,2015,52(5):571-585.
[20] NECKEL N,KROPEK J,BOLCH T,et al.Glacier mass changes on the Tibetan Plateau 2003-2009 derived from ICESat laser altimetry measurements[J].Environmental Research Letters,2014,9(1):014009.
[21] KE L H,DING X L,SONG C Q.Heterogeneous changes of glaciers over the western Kunlun Mountains based on ICESat and Landsat-8 derived glacier inventory[J].Remote Sensing of Environment,2015,168:13-23.
[22] YU A W,STEPHEN M A,LI S X,et al.Space laser transmitter development for ICESat-2 mission[C].Proc.SPIE 7578,Solid State Lasers XIX:Technology and Devices,757809,2010.
[23] 马莲,李小路,徐腾,等.一种基于重复轨道高程数据的坡度估计算法[J].武汉大学学报(信息科学版),2014,39(9):1121-1127.
[24] SHTAIN Z,FILIN S.Accuracy and reliability assessment of GLAS measurements over Israel[A].International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences[C].2012.247-252.
[25] ABSHIRE J B,SUN X,RIRIS H,et al.Geoscience Laser Altimeter System (GLAS) on the ICESat Mission:On-orbit measurement performance[J].Geophysical Research Letters,2005,32(21):L21S02.
[26] MARTIN C F,THOMAS R H,KRABILL W B,et al.ICESat range and mounting bias estimation over precisely-surveyed terrain[J].Geophysical Research Letters,2005,32(21):L21S07.
[27] MOLIJN R A,LINDENBERGH R C,GUNTER B C.ICESat laser full waveform analysis for the classification of land cover types over the cryosphere[J].International Journal of Remote Sensing,2011,32(23):8799-8822.
[28] JESTER P,HANCOCK D.The algorithm theoretical basis document for level 1A processing[A].ICESat (GLAS) Science Processing Software Document Series[C].NASA Goddard Space Flight Center,2012.
[29] 史红岭,陆洋,杜宗亮,等.基于ICESat块域分析法探测2003~2008年南极冰盖质量变化[J].地球物理学报,2011,54(4):958-965.
[30] WANG X W,CHENG X,GONG P,et al.Earth science applications of ICESat/GLAS:A review[J].International Journal of Remote Sensing,2011,32(23):8837-8864.
[31] MALLET C,BRETAR F.Full-waveform topographic lidar:State-of-the-art[J].ISPRS Journal of Photogrammetry and Remote Sensing,2009,64(1):1-16.
[32] LISANO M E,SCHUTZ B E.Arcsecond-level pointing calibration for ICESat laser altimetry of ice sheets[J].Journal of Geodesy,2001,75(2-3):99-108.
[33] KWOK R,CUNNINGHAM G F,ZWALLY H J,et al.ICESat over Arctic sea ice:Interpretation of altimetric and reflectivity profiles[J].Journal of Geophysical Research:Oceans,2006,111(C6):C06006.
[34] MOHOLDT G,NUTH C,HAGEN J O,et al.Recent elevation changes of Svalbard glaciers derived from ICESat laser altimetry[J].Remote Sensing of Environment,2010,114(11):2756-2767.
[35] SHI J C,MENENTI M,LINDENBERGH R.Parameterization of surface roughness based on ICESat/GLAS full waveforms:A case study on the Tibetan Plateau[J].Journal of Hydrometeorology,2013,14(4):1278-1292.
[36] SMITH M W.Roughness in the Earth sciences[J].Earth-Science Reviews,2014,136:202-225.
[37] 黄骁力,汤国安,刘凯.DEM分辨率对地形纹理特征提取的影响[J].地球信息科学学报,2015,17(7):822-829.
[38] ROSENBURG M,AHARONSON O,HEAD J,et al.Global surface slopes and roughness of the Moon from the Lunar Orbiter Laser Altimeter[J].Journal of Geophysical Research:Planets (1991-2012),2011,116(E2):E02001.
[39] PHAN V.Observing Changes in Lake Level and Glacial Thickness on the Tibetan Plateau with the ICESat Laser Altimeter[D].TU Delft,Delft University of Technology,2015.
[40] SCHUTZ B.Laser footprint location (geolocation) and surface profiles[A].Geoscience Laser Altimeter System (GLAS):Algorithm Theoretical Basis Document Version 3.0[C].Center for Space Research,The University of Texas at Austin,2002.
[41] BRENNER A C,ZWALLY H J,BENTLEY C R,et al.Derivation of range and range distributions from laser pulse waveform analysis for surface elevations,roughness,slope,and vegetation heights[A].Algorithm Theoretical Basis Document 4.0[C].NASA Goddard Space Flight Center,2003.26-32.
[42] WU H B,WANG N L,GUO Z M,et al.Regional glacier mass loss estimated by ICESat-GLAS data and SRTM digital elevation model in the West Kunlun Mountains,Tibetan Plateau,2003-2009[J].Journal of Applied Remote Sensing,2014,8(1):083515.
[43] 文汉江,刘焕玲,常晓涛,等.利用GPS测量检核ICESat卫星激光测高数据精度[J].武汉大学学报(信息科学版),2011,36(3):262-266.
[44] SHUTZ B E,URBAN T J.The GLAS Algorithm Theoretical Basis Document for Laser Footprint Location (Geolocation) and Surface Profiles[R].NASA Goddard Space Flight Center,2014.
[45] MAHONEY C,KLJUN N,LOS S,et al.Slope estimation from ICESat/GLAS[J].Remote Sensing,2014,6(10):10051-10069.
[46] YI D H,ZWALLY H J,SUN X L.ICESat measurement of Greenland ice sheet surface slope and roughness[J].Annals of Glaciology,2005,42(1):83-89.
Characteristics of ICESat-GLAS Full Waveforms and the Errors of GLAS Footprints Elevation Change Influenced by the Surface Slope and Roughness
WU Hong-bo1,2,3,GUO Zhong-ming4,CHEN An-an5,6,HE Jian-qiao5
(1.SchoolofHistoryandTourism,ShaanxiSci-TechUniversity,Hanzhong723000;2.InstituteofTibetanPlateauResearch,ChineseofAcademySciences,Beijing100101;3.CASCenterforExcellenceinTibetanPlateauEarthSciences,Beijing100101;4.SchoolofEnvironmentalSciences,NanjingXiaozhuangUniversity,Nanjing211171;5.StateKeyLaboratoryofCryosphericSciences,ColdandAridRegionsEnvironmentalandEngineeringResearchInstitute,ChineseAcademyofSciences,Lanzhou730000;6.UniversityofChineseAcademyofSciences,Beijing100049,China)
To evaluate on the uncertainty of the GLAS footprints elevation change on the glaciers in Tibet Plateau,the GLA01 product and GLA14 product are employed for the error analysis of GLAS footprints elevation.The bias of the centroid of return echo signal in the GLAS waveforms in the glacier surface and non-glacier land surface region are compared based on the SRTM DEM-derived roughness and slope data.Using the multiple linear regression models,the GLAS footprints elevation deviation are significantly related to the land surface roughness and slope of GLAS footprints.The results showed that the errors of GLAS footprints elevation on the glacier surface are 0.1 m,while the glacier surface slope value of GLAS footprints are less than 10°.The deviation of GLAS footprints elevation increases with the surface slope categories increased.The GLAS footprints are jointly affected by the slope and roughness,which the overall uncertain error was 0.3 m.In addition,if the glacier surface slope is more than 45°,the corresponding GLAS footprints are not available for estimation on the surface elevation change.The GLAS full waveforms are filtered by the Gaussian-Centroid method and the process can reduce the uncertain error of the centroid of the laser returned echo of the GLAS footprints.In future studies,the offset compensation caused by the glacier surface motion and the glacier surface DEM elevation deviation evaluation without considering the penetration effect of GLAS returned echo on the snow/ice surface would be considered.
ICESat-GLAS;slope;roughness;waveforms characteristics;elevation;uncertainty
2015-11-12;
2016-02-01
国家自然科学基金重点项目(41190084);中国科学院战略性先导科技专项(B类) (XDB03030200);中国科学院海外科教基地建设计划(SAJC201303);陕西理工大学人才启动项目(SLGQD16-09)
吴红波(1984-),男,博士后,讲师,从事冰雪遥感方向研究。E-mail:wuhongbo12366@sina.com
10.3969/j.issn.1672-0504.2016.04.006
P237
A
1672-0504(2016)04-0030-08
