SfM精细表面测量:分辨率和精度的评估及误差分析
2016-06-05赵文强,林舟
赵 文 强,林 舟
(浙江大学地球科学学院,浙江 杭州 310000)
SfM精细表面测量:分辨率和精度的评估及误差分析
赵 文 强,林 舟
(浙江大学地球科学学院,浙江 杭州 310000)
SfM(Structure from Motion,运动重建结构)是一种新的高精度三维形态模型数据获取技术,其应用于精细表面测量中的分辨率及精度尚待详细的评估。该文以化石表面为研究对象,重叠度70%摄取化石表面的照片并生成高密度点云,同TLS(Terrestrial Laser Scanner,地面三维激光扫描仪)点云进行精配准后生成DEM。以TLS点云及DEM作为比较对象,经过化石表面微小特征与剖面解析、点云、DEM偏差计算和误差分布的分析和验证,结果显示:1) SfM DEM实际表面水平及垂直分辨率分别可达到1 mm和2 mm。2) SfM测量精度非常接近TLS,SfM点云的RMSE为1.3 mm,平均垂直偏差为1.5 mm;SfM DEM的RMSE为1.9 mm,平均绝对高程偏差为2.2 mm。3) SfM测量误差在大于55°的坡度范围内与坡度呈正相关,在阴影值0~170区间内与阴影呈反相关,照片拍摄角度不完整、数量不充分的区域误差较大。研究为SfM测量的精细程度提供了参考,也为地学应用中表面微小节理识别及剖面分析提供了便利可靠方法。
SfM;TLS(地面三维激光扫描仪);点云;DEM分辨率;精度
0 引言
如何获取和利用高精度高分辨率形态模型数据一直是地学学者的关注热点。目前广受注目的地面与机载LiDAR(Light Detection and Ranging,激光雷达)测量为我们提供了从大尺度区域地形露头剖面到小尺度精细节理的不同层次三维形态模型数据,但是其数据获取成本高昂。最近,SfM摄影测量技术开始应用于获取高分辨率三维地形数据。SfM是通过运动的相机获取多视角图像集来估计相机位姿(Motion)和重建场景结构(Structure)的技术,仅需拍摄一组覆盖测量区域的照片集即可生成高分辨率地形数据,成本低廉,操作简单。近年来已出现许多SfM应用实例,例如Snavely等[1]通过网络上的无序照片,进行照片中风景的三维重建;Westoby等[2]利用无人机进行SfM测量获得分米级精度的地形数据;Harwin等[3]利用无人机SfM测量海岸线获得了1~3 cm点间隔点云,经 DGPS(差分全球定位系统)和全站仪测量验证,点云精度约25~40 mm;Tonkin等[4]于冰碛土小山丘地貌进行无人机SfM测量获得亚米级分辨率DEM,并发现植被覆盖较多,坡度陡峭的地形区域RMSE更高;Morgenroth等[5]通过SfM测量生成了树高误差为 2.59%、茎直径误差为3.7%的树结构三维模型;Lucieer等[6]通过低空飞行拍摄南极洲东部苔藓地貌,获得2 cm分辨率DSM(数字地表模型)来分析上游雪融水流对苔藓健康程度的影响;魏占玉等[7]对比独山子逆断裂-背斜带机载LiDAR测量和基于航拍照片的SfM测量结果,显示了SfM在大尺度测量情况下更好的DEM分辨率以及媲美机载LiDAR测量的精度。这些SfM实际应用显示了其很好的分辨率以及测量精度,但是迄今为止的应用研究多为较大尺度地表以及较远距离的测量结果,且对SfM摄影测量的精度和分辨率的分析较为粗略。SfM测量的精细程度以及哪些地形因素、测量条件会影响其精度,仍是每个使用者心里的存疑。因此,SfM精细测量的精度及分辨率尚需详细的评价。
本文以一块表面纹理丰富、类地表形态的化石作为测量对象,利用SfM技术获取化石表面点云和DEM,与TLS点云及DEM对比,定性分析SfM DEM分辨率并定量计算SfM点云及DEM偏差,探究SfM测量的节理分辨能力、精度以及误差影响因素。
1 SfM运动重建结构原理
SfM先由SIFT(Scale Invariant Feature Transform,尺度不变特征转换)算法提取图像上的特征点[8,9],这些特征点被提取后即可利用其轨迹对相机进行相对定位,并粗略评估相机内部参数。图1中P为三维场景中某点,p′与p为P在不同位置影像中的投影特征点,O′(x′,y′,z′)和O(x,y,z)分别为相机运动前、后的坐标位置,(R,t)为相机相对运动矢量,R、t分别为相机旋转矩阵、相机平移矩阵。通过三维场景中的特征点P在照片中由p′到p的相对移动来还原相机的运动矢量(R,t),然后通过特征点迭代光束平差[10]来优化相机位置和参数[11]。
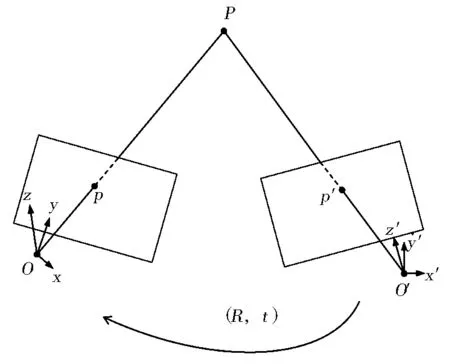
图1 SfM运动重建结构原理
2 测量对象及实验设备
本次实验测量对象为浙江大学地质博物馆中一尊钉挂于墙面的鳄鱼化石,其表面厘米级及毫米级纹理起伏变化丰富,是精细表面测量的理想对象。
实验所用相机为宾得K5-II,有效像素1 628万,图像分辨率4 928×3 264,镜头为腾龙1 750 mm,最大光圈f/2.8。地面三维激光扫描设备为Riegl VZ1000,可以水平360°、垂直100°扫描,测距范围为2.5~1 500 m,提供高达0.0005°的角分辨率,测距精度1~2 mm,近距离点位精度可达毫米级[12],能够准确表达化石表面微小的地形起伏,满足作为参考坐标精度的要求。
3 研究方法
为了研究SfM小尺度精细测量的分辨率、精度以及误差影响因素,本文分别通过TLS和SfM技术获取化石点云并制作DEM,先进行DEM定性判读确定SfM分辨率,再于SfM点云精配准后进行点云和DEM误差的定量计算,分析误差分布找出可能的误差影响因素,并统计误差与影响误差的地形因子的相关性来验证分析结果。
3.1 TLS测量获取参考点云及DEM
在化石正前方约5 m处架设测站,采用单站测量以避免多站点拼接误差,垂直与水平扫描角度分辨率参数均设置为0.03°,扫描模式选择Reflector,获得化石中心区域间隔为2 mm的点云。此时TLS点云中存在非地形表面的噪点,参考李永强等的双重滤波思路[13],先手动剔除明显的非地形点完成粗滤波,再于Riscan Pro中选择2.5D Raster滤波,并以2 mm为间隔,保留Z轴方向上最低点,过滤掉相同水平位置上的较高点,完成精滤波。由于TLS激光发射功率较高,近距离测量如果设置最高点云密度的扫描参数则会产生分层点云,以上操作降低了TLS点云密度,影响了TLS DEM分辨率,但是保证了TLS点云的高精度及其作为SfM精度评估标准的准确性。
为了制作出化石表面DEM,点云需投影到水平面-高程坐标系中。一般情况下较大尺度的地形测绘,通过DGPS或者全站仪获取控制点位置和高程信息并转换到标准的水平面-高程坐标系。对于小尺度化石而言DGPS误差较大,同时化石位于墙面上只能使用全站仪中误差较大的照准测量模式。为了避免引入额外误差,以化石所挂墙面作为参考水平面,在TLS点云操作软件Riscan Pro中于墙面点云中选择3点生成已知尺寸矩形,以矩形两边作为X、Y轴,以矩形角点为坐标原点,在右手准则下构建新坐标系,对整个三维扫描点云进行坐标转换,得到拟平面—高程坐标,坐标转换RMSE为2.2 mm。手动删除化石周围多余墙面点云,减少后期运算量。最终点云数量为88 519,以文本格式导出并保存。
将上述点云导入ArcMap 10.3选择IDW插值生成DEM,这里TLS DEM网格尺寸选择尤为关键。TLS点云平均间隔为2.5 mm,实际上大部分点云间隔都在2 mm左右。点云密度约束着DEM的网格尺寸[14],为了保证插值后网格中都有实际点,而非通过插值获得,从而保证DEM的真实性,网格尺寸不能小于2 mm。本文生成了网格尺寸分别为2 mm、3 mm、4 mm的TLS DEM,截取化石表面相同位置剖面进行对比,结果显示2 mm DEM显现出其他两者未能分辨出的化石表面凹凸地形,表明2 mm DEM对表面特征的反映更准确而完整。因此文中选择2 mm网格尺寸的TLS DEM作为参考DEM,用于SfM DEM的分辨率对比及精度评价。
3.2 SfM测量获取点云及DEM
SfM摄影中相机距离化石表面约30~40 cm,光圈设置为2.8,最大程度采进自然光,ISO设置为最小的200,最大程度减少像素噪点,图片格式为JPG。从左到右,由上而下进行拍摄,拍摄保持稳定不虚焦,拍摄完后检查所有照片是否清晰,如有不清晰处则对应位置重新拍摄。最终平行化石表面全覆盖的拍摄了111张重叠度约为70%的照片。
照片处理软件选择的是Agisoft Photoscan,该软件集成了SfM中影像的关键特征点提取、相机相对定位和匹配、稀疏点云生成、密集点云生成、纹理映射和坐标配准等多项功能,界面操作简捷。照片经处理获得的点云数量达21 213 471,远高于TLS点云,平均间隔为0.16 mm。选择SfM点云中物体的4个边角部位角点作为控制点进行粗配准,配准RMSE为3.5 mm。删除点云中明显错误的点,将SfM点云导出以文本格式保存,导入Cloud Compare(www.cloudcompare.com)软件中与TLS点云进行ICP拼接使点云达到最佳拟合状态。
由于SfM点云是基于影像色彩视差构建的,而TLS点云是基于激光的回波构建,所以尽管SfM点云密度较高,但并不能判断SfM DEM实际是否能识别出微小节理及剖面细节。为了选择最为恰当的SfM DEM网格尺寸,把SfM点云导入ArcMap 10.3,经过IDW插值生成网格尺寸分别为1 mm、2 mm、3 mm的DEM,截取细节信息丰富的一处表面进行对比,图2显示1 mm DEM更完全地表达了化石表面的小凹坑细节信息。受限于计算机性能,无法进行更小网格尺寸的差值,因此选择网格尺寸为1 mm的SfM DEM用作DEM分辨率的定性判断和精度的定量计算。
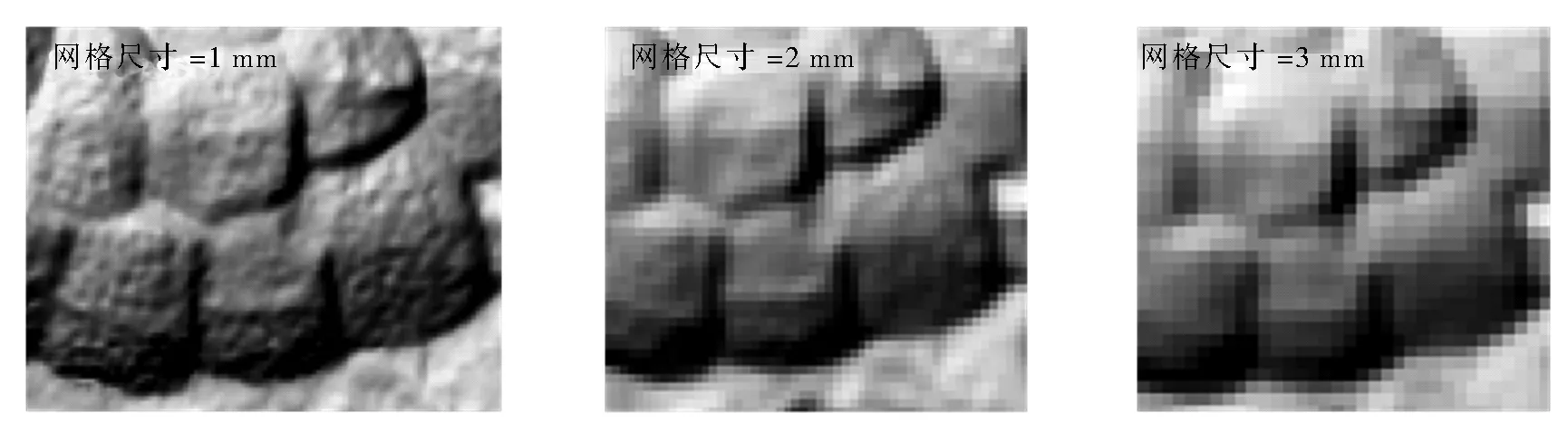
图2 网格尺寸分别为1 mm、2 mm、3 mm的SfM DEM阴影图
3.3 精度评价及误差分析方法
点云是获取DEM的原始数据,DEM误差来源于点云本身的误差及插值带来的误差。因此,对SfM测量的精度评价涉及点云精度和DEM精度两方面的评估。对SfM点云的精度评价,采用Cloud Compare软件中的Cloud-Cloud Compare功能对精配准后的SfM点云进行点云误差分布计算,以TLS点云作为参考点云,以SfM点云中每个点为圆心,不断扩大搜索半径找出距离最近的TLS点,以与其最近点之间垂直距离作为两个点的垂直偏差,得到点云垂直偏差统计分布图,以点云的垂直偏差代表SfM点云精度。对SfM DEM的精度评价,通过计算TLS DEM和SfM DEM高程差的绝对值来代表SfM DEM的精度,并生成化石表面绝对高程偏差分布图,用作误差的定性及定量分析。
为了研究影响SfM测量精度的误差因素,通过SfM DEM误差分布图分析可能影响误差的多个因子,统计相关影响因子不同区间内平均高程偏差绝对值,生成散点图,并通过多项式回归生成相关性曲线,以分析地形因子和误差的相关性。
4 结果分析
4.1 SfM DEM实际分辨率
对化石实际表面的观察发现化石表面最微小的特征为其表面上的腐蚀凹坑,长宽约2 mm,图2中1 mm SfM DEM可清晰地显示这些凹坑,很好地反映了化石表面的腐蚀凹坑,即SfM已达到化石表面地形特征中最微小地形的分辨能力。经量测,这些凹坑宽度从2~4 mm不等,对应剖面上深度最小达1 mm,表明本实验中SfM DEM已达到2 mm实际水平表面分辨能力和1 mm的垂直表面分辨能力。
研究以TLS DEM作为比较,以反映SfM DEM整体实际分辨效果,进一步探究SfM DEM的分辨能力。图3显示,相对于左侧TLS DEM,右侧SfM DEM表面细节更清晰而细腻,化石表面骨骼层次及微小纹理,如线状凸起及点状凹坑清晰可见,但是化石边缘右半部分显得嘈杂、粗糙;TLS DEM整体上较为粗糙,表面凹坑无法辨别,但是化石边缘清晰。虽然TLS点云精度较高,但是由于近距离激光高功率反射的限制,无法获取足够高密度点云来表现更细致的节理。
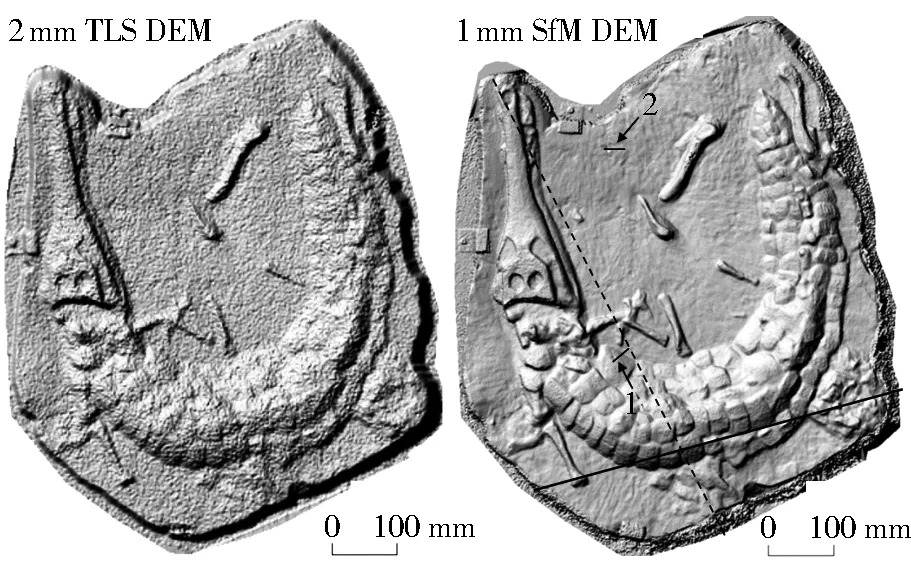
图3 2 mm TLS DEM与1 mm SfM DEM阴影图
除DEM的目视判读外,另截取化石表面两个微小剖面(图3右图中1和2号标记)见图4,此两处凹坑在SfM DEM中均清晰可见,但是在TLS DEM中较难分辨。图4中TLS DEM剖面体现了剖面2中箭头所指的3 mm起伏的凹坑,但未能体现出剖面1箭头所指斜坡凹坑的1 mm起伏。另外,TLS剖面相对SfM剖面明显尖锐,且凹凸不平,为激光点云噪点导致,并非实际地形。综上,结合目视和实际微小起伏剖面的观察,虽然TLS测量更为精细,但是由于功率过高导致无法获取更高密度的点云来生产更高分辨率的DEM,所以本实验中SfM DEM整体效果及局部微小特征的分辨能力均优于TLS DEM。
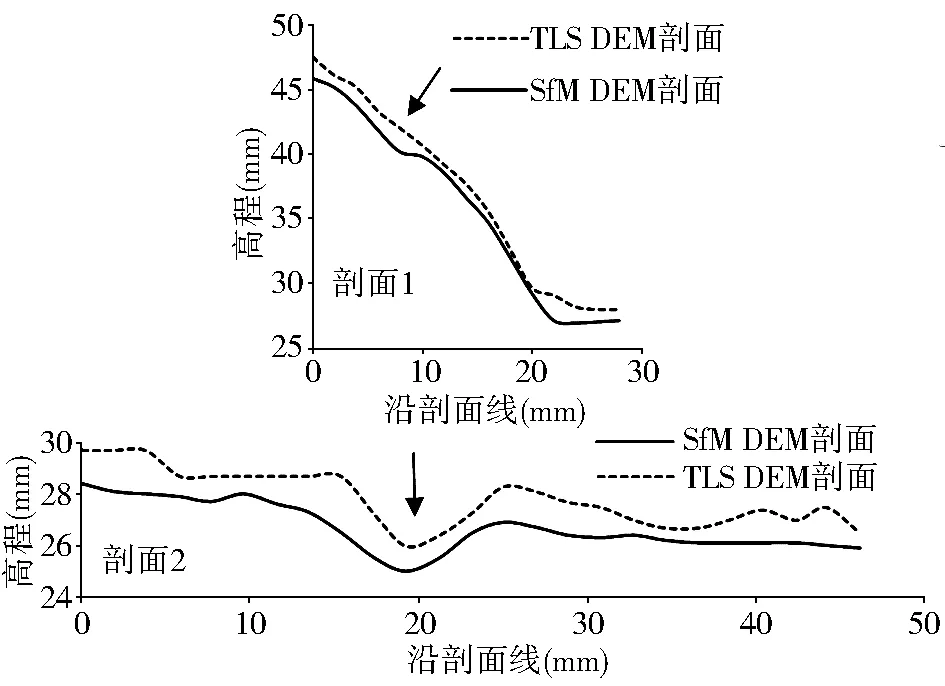
图4 SfM DEM和TLS DEM微小剖面
4.2 SfM精度评价
点云是生成DEM的原始基础数据,因此SfM点云精度是影响SfM地形数据精度的基础因素。点云ICP精配准后,点云拟合RMSE为1.3 mm,表明经过精配准后SfM点云较TLS点云整体上拟合度高。图5显示SfM点云垂直偏差均值为1.5 mm,标准差为1.4 mm,90.04%的点云垂直偏差小于2 mm,1 mm偏差的点云占比最高,点云垂直偏差最大约6 mm,但是占比极少,很可能是TLS点云及SfM点云中未完全消除的噪点即错误点所导致。以上表明SfM点云精度非常接近TLS点云,仅有1~2 mm的垂直偏差。
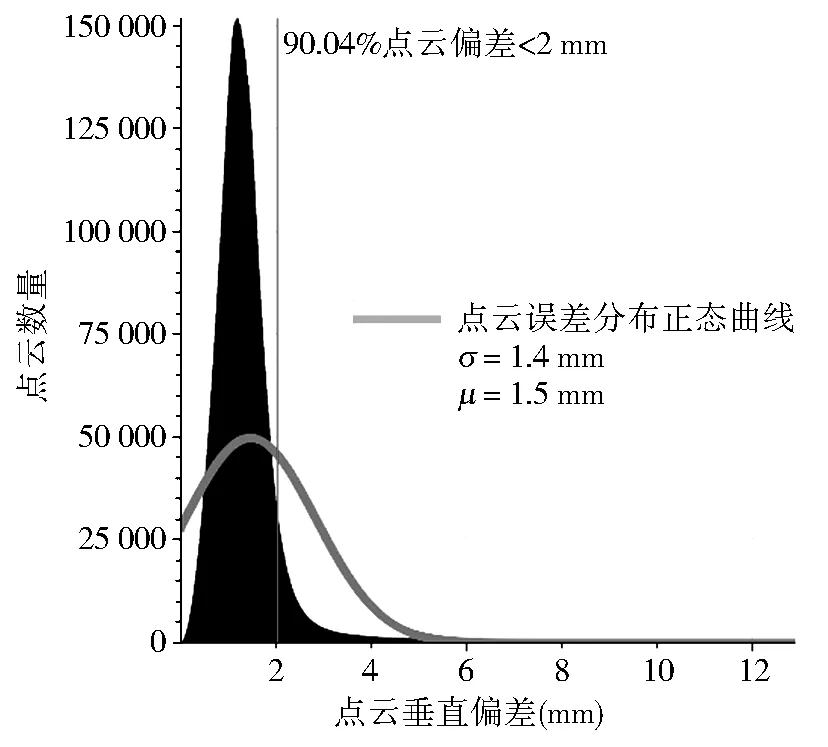
图5 SfM点云相对TLS点云的垂直偏差分布直方图
地学研究中,往往是通过DEM来进行地形分析与地形因子的识别提取,因此SfM DEM精度分析非常必要。图6b显示SfM DEM的RMSE为1.9 mm,高程偏差绝对值均值为2.2 mm,83.12%的SfM DEM高程偏差绝对值小于2 mm,89.01%小于3 mm,并且偏差越小的DEM栅格占比越高,偏差值向0 mm收紧。由于在TLS点云转换到参考水平面坐标系时已产生2.2 mm误差,因此高程偏差绝对值小于2 mm的区域可认为SfM DEM与TLS DEM精度几乎相同。图6a显示大小为3~5 mm的高程偏差占比较少,分布较离散而无规律;大于5 mm的高程偏差出现在化石周围轮廓一圈,此处SfM DEM高程明显高于TLS,最高偏差达到56 mm,接近化石边缘到墙面的垂直距离。除此之外,SfM DEM的高程偏差绝对值均小于2 mm,这表明除去化石边缘部分,SfM DEM的高程精度非常接近TLS DEM。
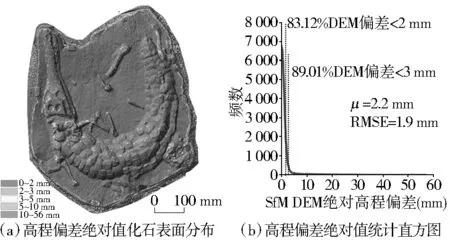
图6 SfM DEM高程偏差绝对值化石表面分布与统计直方图
4.3 SfM DEM误差分析
上文中的绝对高程偏差可认为是SfM DEM相对TLS DEM的误差,下文将以误差来描述。SfM DEM误差分布的特征体现在大于5 mm 的DEM误差出现在化石边缘,而其余3~5 mm误差分布较为零散、无规律。目前TLS是对剖面测量的极为精细的方法,为了研究误差分布的规律及找出原因,观察SfM DEM剖面相对TLS DEM剖面的偏差见图7(剖面a和剖面b分别截取自图3右图中长实线与虚线位置)。
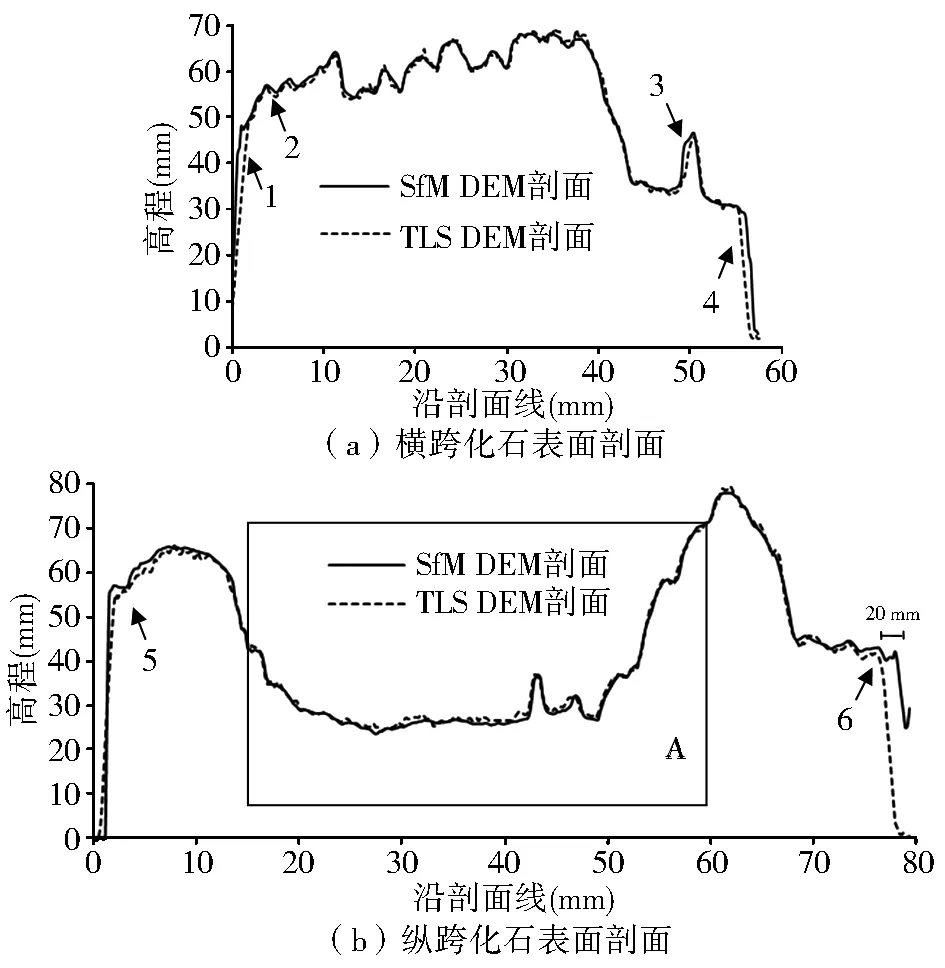
图7 SfM DEM与TLS DEM剖面
图7中显示的1-6号标记是SfM与TLS剖面相差较大的位置,这些位置的共同特征是都位于坡度陡增的上升或者下降的坡面上,因此SfM DEM的误差可能和坡度相关。1、4、5、6号标记处的误差达到10 mm以上,并显示出SfM DEM剖面较TLS DEM剖面明显有向化石外侧延伸的趋势,而在化石中心区域均没有出现较大误差。分析原因在于本次照片拍摄由化石边缘开始到另一侧边缘结束,因此中心区域地形都能由来自上下左右不同方向的照片进行特征捕捉,而化石边缘则缺少了化石外侧方向的照片拍摄,并且覆盖边缘的照片数量也远少于化石中心区域。根据SfM的三维重建原理,由于边缘缺乏外侧入射角度的照片信息而导致重建出现畸变,同时边缘照片数量较少也造成了边缘特征提取不充分,降低了边缘的重建精度。
进一步观察发现,图7显示化石右侧边缘误差明显比左侧边缘大,剖面b显示出SfM DEM化石右侧边缘超出TLS DEM边界20 mm,从而导致高程上出现极大偏差。结合实地观察,化石位于窗户一侧,拍摄时间约为下午两点半,阳光从化石左侧射入,化石右半部分阳光照射产生的阴影非常明显,由于SfM是通过色彩信息构建视差,因此考虑在SfM处理过程中将阴影区域视为化石轮廓的延伸,即边缘阴影影响了SfM测量的精度,甚至产生了错误。因此,阴影是潜在的SfM误差影响因素。
另外,图7剖面b中方框A区域显示地势较低处误差整体较地势较高区域偏大。由于机载平台SfM和手持SfM的区别主要在于相机到地形表面的距离,而这两者在精度上也表现出较大不同[15],因此考虑微小距离变化也会造成测量误差的微小不同,即化石表面距离相机越远处精度越低。因此,SfM DEM的误差可能和高程相关。
针对以上提出的地形高程(即化石表面到参考平面的距离)、坡度及阴影3个误差影响因素,本文对高程、阴影值、坡度与对应区域DEM误差平均值的关系进行了统计,结果见图8-图10。其中由于化石边缘阴影造成的错误级别的误差区域在坡度图和高程图中已被去除,以免由于误差求均值而影响坡度和高程因子实际影响的判断。

图8 坡度与SfM DEM绝对误差平均值关系
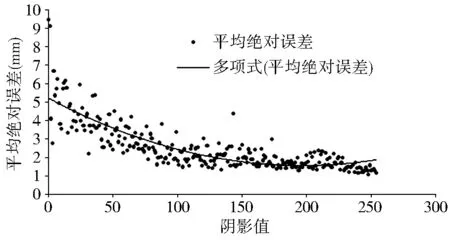
图9 阴影值与SfM DEM绝对误差平均值关系
图8显示0°~55°范围内平均误差随坡度的升高呈缓慢升高趋势,55°~89°范围内开始急剧升高,由1 mm陡增至5 mm,这表明在地势陡峭的位置,SfM的高程表达误差较大。分析原因可能是由于在水平方向上,SfM和TLS测量结果有一定偏差错位,在较陡的坡面上,较小的水平错位也会导致较大的高程偏差。由于化石边缘和墙面近乎成90°,因此坡度也是化石边缘轮廓处误差较大的因素之一。图9显示在阴影较浅处(阴影值为170~255),误差并不随阴影值的增加而变大,而在0~170的阴影值区域,误差随着阴影的加深呈指数级增加,并在接近完全阴影处瞬间陡增至近10 mm,这表明SfM方法的最大弊端是极度依赖照片色彩信息,因此对于光照或者拍摄角度等问题造成的阴影区域的识别能力较差。图10显示不同高程区间误差基本在1.5 mm内,并未随高程变化出现正向或者反向的变化关系,表明本实验中1~8 cm的拍摄距离变化并不会对SfM测量误差造成影响,因此上文提到的精度与相机到表面距离呈反比的推测在小尺度30 cm近距离SfM测量上并不成立。
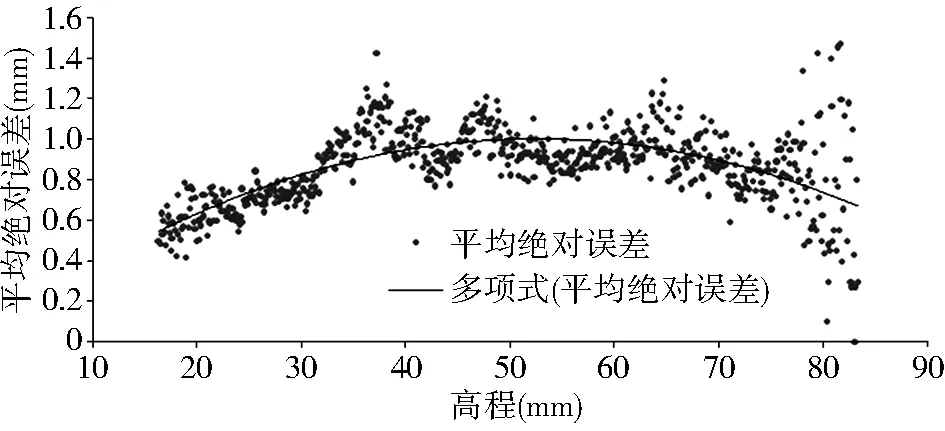
图10 高程与SfM DEM绝对误差平均值关系
5 结语
研究通过SfM测量获得高密度化石点云并生成DEM,寻找SfM DEM能识别出的最微小特征,计算SfM点云及DEM相对于TLS测量结果的误差,分析误差原因并通过统计验证,得到以下结论:1)SfM测量能获得超高密度化石点云,SfM DEM实际分辨率较高。SfM点云间隔低至0.16 mm,SfM DEM实际表面水平及垂直分辨率分别为2 mm、1 mm,证明SfM完全具备进行小尺度微观节理与剖面测量的能力,可以用于小尺度表面节理和剖面的分析和特征提取。2)SfM测量精度非常接近TLS测量。经过ICP算法进行配准优化后,SfM点云平均垂直偏差为1.5 mm,RMSE为1.1 mm; SfM DEM栅格整体平均绝对高程偏差为2.2 mm,RMSE为1.9 mm。考虑到TLS点云在坐标转换中存在2.2 mm误差,可以认为SfM DEM与TLS DEM精度几乎一致。3)SfM DEM精度受到照片角度和数量、坡度和阴影深度的影响。经统计验证,化石SfM DEM的误差和化石表面坡度值呈正比,且在坡度大于55°区间,误差随坡度增加显著上升;同时在阴影值0~170区间内与化石表面阴影值呈反比,即阴影越深误差越大,而与化石表面高程并无明显相关性。此外,照片角度和数量的不充足也会导致点云重建出现错误而导致误差。
最后需要指出的是,研究获得的SfM精细测量精度是相对于高精度的TLS测量的精度,结果显示SfM在精细表面测量上精度十分接近TLS测量,但并未获得SfM测量的绝对精度。今后对于SfM精细表面测量精度的研究,计划以更高精度的近距离测量设备及更加严谨的精度验证方案获知SfM测量的绝对精度。
[1] SNAVELY N,SEITZ S M,SZELISKI R.Modeling the world from internet photo collections[J].International Journal of Computer Vision,2008,80(2):189-210.
[2] WESTOBY M J,BRASINGTON J,GLASSER N F,et al.′Structure-from-Motion′ photogrammetry:A low-cost,effective tool for geoscience applications[J].Geomorphology,2012,179:300-314.
[3] HARWIN S,LUCIEER A.Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery[J].Remote Sensing,2012,4(6):1573-1599.
[4] TONKIN T N,MIDGLEY N G,GRAHAM D J,et al.The potential of small unmanned aircraft systems and structure-from-motion for topographic surveys:A test of emerging integrated approaches at Cwm Idwal,North Wales[J].Geomorphology,2014,226(1-2):35-43.
[5] MORGENROTH J,GOMEZ C.Assessment of tree structure using a 3D image analysis technique——A proof of concept[J].Urban Forestry & Urban Greening,2013,13(1):198-203.
[6] LUCIEER A,TURNER D,KING D H,et al.Using an Unmanned Aerial Vehicle (UAV) to capture micro-topography of Antarctic moss beds[J].International Journal of Applied Earth Observation & Geoinformation,2014,27(4):53-62.
[7] 魏占玉,ARROWSMITH R,何宏林,等.基于SfM方法的高密度点云数据生成及精度分析[J].地震地质,2015(2):636-648.
[8] SNAVELY N,SEITZ S M,SZELISKI R.Photo tourism:Exploring photo collections in 3D[J].ACM Transactions on Graphics (TOG),2006,25(3):835-846.
[9] 程红,陈文剑.基于SIFT算法的图像匹配剔点方法研究[J].地理与地理信息科学,2012(6):17-19.
[10] HARTLEY R,ZISSERMAN A.Multiple view geometry in computer vision[J].Cambridge University Press,2006,30(9-10):1865-1872.
[11] 马颂德,张正友.计算机视觉[M].北京:科学出版社,1998.
[12] 徐寿志,程鹏飞,张玉,等.地面三维激光扫描仪的检校与测量精度评定[J].测绘通报,2016(2):56-61.
[13] 李永强,吴立新,刘会云,等.陡坡密集点云双重滤波方法研究[J].地理与地理信息科学,2011,27(1):7-10.
[14] LANGRIDGE R M,RIES W F,FARRIER T,et al.Developing sub 5-m LiDAR DEMs for forested sections of the Alpine and Hope faults,South Island,New Zealand:Implications for structural interpretations[J].Journal of Structural Geology,2013,64(4):53-66.
[15] DIETRICH J T.Applications of structure-from-motion photogrammetry to fluvial geomorphology[D].Dissertations & Theses-Gradworks,2014.
《地理与地理信息科学》2017年第33卷第1期内容预告
顾及地形特征语义约束的高保真地形建模方法探索
周 波,刘学军,徐俊波
基于纹理和地形辅助的山区土地利用信息提取研究
陈 波,胡玉福,喻 攀,等
一种面向三维地质剖面的形体表面重构算法
黄继先,毛先成,邓 浩
基于多指标综合的巢湖环湖区水系连通性评价
夏 敏,周 震,赵海霞
融合时空异质特征的TRMM 3B43降水产品适用性分析——以湖北省为例
王维琛,张 唯,谭伟伟,等
华北山地夷平面研究
吴 忱,张秀清,王 然,等
北半球湖泊营养状态的地理格局及其社会经济制约因素
黄春玲,乔强龙,曹艳敏,等
环渤海地区港口体系与其城市经济的偏移增长及重心耦合态势
金 一,郭建科,韩增林,等
基于网络分析法的山东省新型城镇化空间特征研究
于 伟,张 鹏
基于地理特征的跨区域线性文化遗产旅游形象策略研究
任唤麟
SfM Precise Surface Measurement:Evaluation of Resolution and Accuracy and Error Analysis
ZHAO Wen-qiang,LIN Zhou
(SchoolofEarthSciences,ZhejiangUniversity,Hangzhou310000,China)
As a new technology to acquire high-resolution Digital Elevation Models (DEMs),the resolution and accuracy of SfM(Structure from Motion)measurement for fine surface survey remains unclear.In this study,we took 111 parallel photos with 70% overlapping on a fossil surface,and generated high density SfM point cloud by Agisoft Photoscan software.To compare with the SfM measurement,a single station TLS measurement was also carried out,and the point cloud was acquired.The SfM point cloud was then calibrated by the TLS point cloud and 1 mm SfM DEM was constructed through IDW interpolation.Comparisons between the SfM and TLS data indicate that:1)The resolution of SfM DEM is better than TLS DEM,and the horizontal and vertical resolution of SfM DEM can achieve 2 mm and 1 mm,respectively.2)The accuracy of the SfM data is comparable to that of the TLS data.For the SfM point cloud data,the Root Mean Square Error (RMSE) at the calibration by the TLS point cloud is 1.3 mm,and the mean vertical deviation is 1.5 mm.For the 1 mm SfM DEM,the RMSE and the mean height deviation are 1.9 mm and 2.2 mm,respectively.3)The error of SfM measurement is effected by slope angle,shade and shooting angle.The larger error appears in the area with steep slope or in shadows.In addition,insufficient of shooting density or shooting angle can bring larger error too.The DEM error shows positive relation to the slope degree in range of 55° to 90°,and shows negative relation to the hill-shade value in range of 0 to 170.The results are helpful for better understanding and further application of SfM measurement in geologic and geographic studies.
SfM;TLS(Terrestrial Laser Scanner);point cloud;DEM resolution;accuracy
2016-02-02;
2016-05-17
国家社会科学基金项目(13&ZD192);国家自然科学基金项目(41472174); 浙江省文物保护科技项目(2014012)
赵文强(1991-),男,硕士研究生,主要研究方向为地形计量/GIS。E-mail:879451079@qq.com
10.3969/j.issn.1672-0504.2016.06.005
TP391;P208
A
1672-0504(2016)06-0025-07