制冷机冷却的样品温度稳定性实验研究
2016-06-01李空荣刘立强熊联友李
李空荣 周 刚 刘立强熊联友李 青
(1中国科学院理化技术研究所低温工程学重点实验室 北京 100190)(2中国科学院大学 北京 100049)
制冷机冷却的样品温度稳定性实验研究
李空荣1,2周 刚1刘立强1熊联友1李 青1
(1中国科学院理化技术研究所低温工程学重点实验室 北京 100190)(2中国科学院大学 北京 100049)
在5.6—20 K温区内,G-M制冷机直接冷却样品会给样品上带来至少400 mK的温度波动。为了使样品上的温度波动峰峰值小于1 mK,设计了一套高精度低温温度测量系统。系统通过超临界氦和2 mm厚聚四氟乙烯片热阻相结合的方式来抑制制冷机冷头的温度波动。实验结果表明,在7 K、18.7 K、20 K温度下,样品的温度波动峰峰值始终小于0.8 mK。此外,系统通过关闭制冷机的方式,短时间内解决了样品上的机械振动问题。
制冷机 温度波动 超临界氦 机械振动
1 引 言
随着小型制冷机技术的迅速发展,特别是商用的G-M制冷机、脉管制冷机在冷量和性能方面都有了巨大的进步,以制冷机为冷源的低温系统得到了越来越广泛的应用[1]。它们被广泛应用于低温下热物性的测量、小型超导磁体的冷却、红外遥感、超导电子学等领域。与以低温液体为冷源的低温系统相比,以制冷机为冷源的低温系统结构简单,操作方便,不需要消耗低温液体,运行成本低。然而,以制冷机为冷源的低温系统会给被冷却的样品带来较大的机械振动和温度波动。这对于低温下对温度波动和机械振动要求较高的实验研究是不利的,如低温下塞贝克和能斯特系数的测量。
为了解决制冷机冷头温度波动和机械振动的问题,国内外许多学者做了大量的相关研究。Hasegawa 使用玻璃钢(fiber reinforced-plastic)来抑制样品架上的温度波动,他们的实验结果表明,在二级冷头的温度波动幅值约为200 mK时,样品架在4.2 K的温度波动幅值可以减小到0.21 mK[2]。B.J.Haid 通过大量的超临界氦来抑制制冷机冷头的温度波动,其实验方案主要是为了短时间内解决制冷机冷头的机械振动问题,实验结果表明,制冷机在停机一段时间后仍能维持样品架上的温度[3]。另外,Wang 等人对减小制冷机冷却样品的机械振动进行了研究。他们通过波纹管这样的柔性连接结构,有效的减小了样品上的机械振动。同时他们也对样品的温度稳定性进行了实验,其实验结果表明,当样品被冷却到4.28 K时,样品上的温度波动峰峰值小于6 mK[4]。傅伟纯等人提出了在冷头上加装液氦池的方案来减小冷头温度波动,并通过理论计算和实验研究证明了方案的可行性。实验结果表明,充入液氦可以将冷头的温度波动峰峰值从0.2 K减小为0.03 K,并且当冷头温度为4.2 K时,充入液氦后的制冷量比未充入液氦时的制冷量大60 mW[5]。但是由于他们采用液氦来抑制冷头温度波动,当制冷机水平放置时,此系统就难以满足实验的要求。B.J.Haid和 Wang 等人的研究有效的解决了样品上的机械振动问题,但是并未解决样品上温度温度波动过大的问题。而Hasegawa 等人则较好的解决了样品上的温度波动问题,却未考虑样品上的机械振动问题。
为了同时解决制冷机冷却的样品的机械振动和温度波动问题,研究设计了一套以G-M制冷机为冷源的高精度低温温度测量系统。实验过程中,以超临界氦和聚四氟乙烯热阻相结合的方式来减小样品上的温度波动,并通过压力控制器使氦容器中的压力始终稳定在1.55 MPa。实验结果表明,当二级冷头的温度稳定在5.6 K时,样品在7 K、18.7 K、20 K时的温度波动峰峰值均小于0.8 mK。同时,当关闭制冷机时,样品上的温度能够稳定在18.7 K,其稳定时间超过30 min,并且在此期间样品上的温度波动峰峰值始终小于1 mK。
2 实验系统
制冷机冷却样品的实验系统示意图如图1所示。实验系统的核心部件氦容器安装在G-M制冷机(住友RDK-415D)的二级冷头上。氦容器的容积为730 ml,端部两法兰的材料为高导无氧铜,并在其上有增强换热的铜肋片。氦容器筒体采用的是不锈钢,可增大其承压能力。氦容器的密封方式采用的是铟丝密封,其结构图如图2所示。高纯氦气通过内径为4 mm的不锈钢管充入氦容器中。在氦气源和氦容器之间连接有压力控制器,可以实时控制氦容器中的压力。实验过程中,氦气的压力始终稳定在1.55 MPa。制冷机一级冷头上连接有盘管式换热器,可以有效缩短样品的降温时间。样品法兰连接在氦容器的底部,两者间通过螺纹连接。样品法兰主要用来固定样品和聚四氟乙烯片热阻。为了减小系统的辐射漏热,分别在一级冷头和样品连接法兰上安装有纯铜的辐射屏,辐射屏的厚度为1 mm。一级辐射屏和二级辐射屏上都包扎20层铝箔复合型深冷绝热材料以进一步降低系统的辐射漏热。安装过程中,所有接触面间均涂有Apison-N Grease, 以减小接触面间的接触热阻。

图1 实验系统示意图Fig.1 Schematic diagram of experiment system
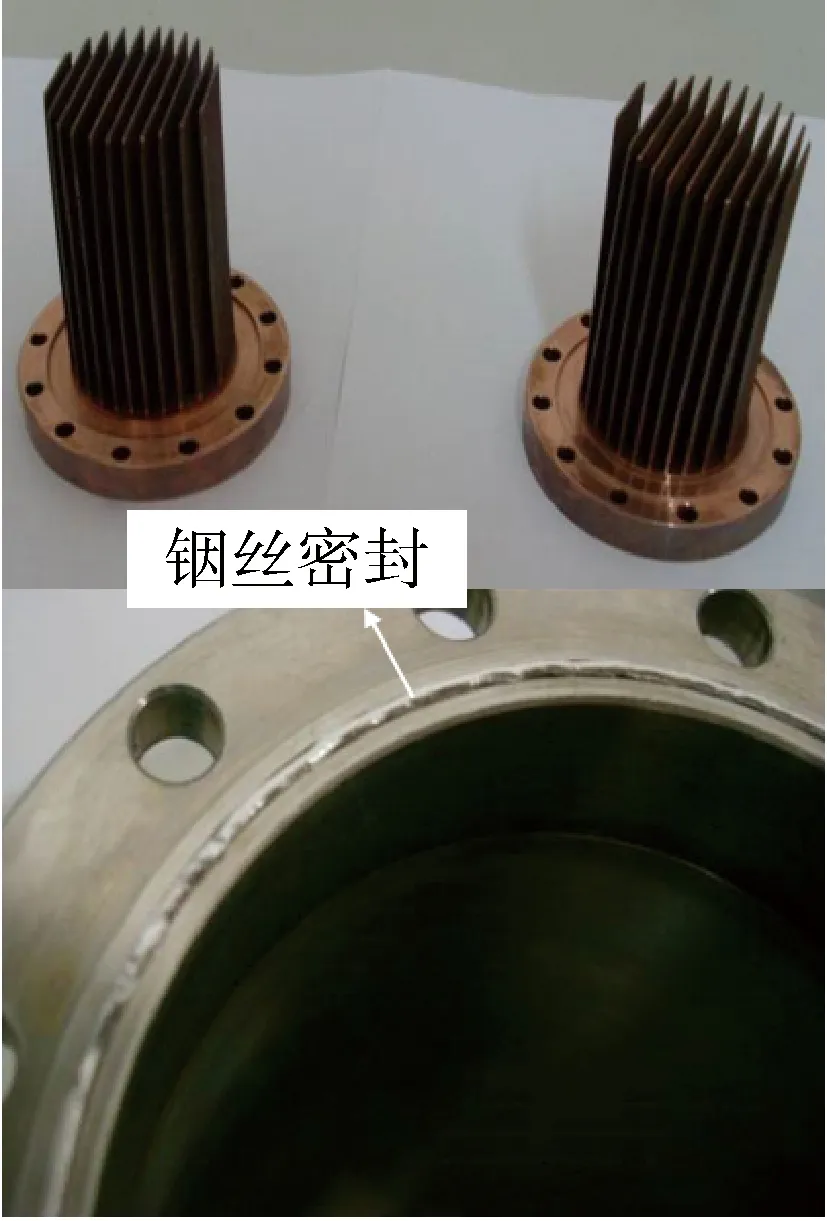
图2 氦容器结构图Fig.2 Construction of helium pot
安装完成后,恒温器内部的结构图如图3所示。

图3 恒温器内部结构图Fig.3 Construction of cryostat
为了达到精确控温的目的,在本实验系统中,布置了两支加热器。镍铬合金电阻线在低温下电阻值很稳定,随温度的变化较小,因此本实验中选用镍铬合金线作为加热器。二级冷头上加热器的电阻为 42 Ω,样品上加热器的电阻为23 Ω,分别用来控制冷头和样品上的温度。为了精确测量样品和二级冷头上的温度,在二级冷头上布置有两支温度计,一支为铑铁型温度计,一支为Cernox型温度计。样品上布置有三支温度计,样品上端的槽内布置了两支Cernox型温度计,下端的孔内布置了一支Ge电阻型温度计。Cernox型温度计采用Lakeshore 340 控温仪进行测量和控温,而 Ge电阻型温度计采用Fluek 1594A超级精密电阻测温仪进行测量。温度计和加热器在样品上的布置如图4所示。所有温度计均采用四线制测量,可有效的减小温度计引线电阻带来的测量误差。所有仪器的数据采集系统通过IEEE-488总线连接,并用Labview软件进行采集和控制。

图4 温度计和加热器的布置图Fig.4 Thermometer and heater distribution picture
3 制冷机开启时,样品温度稳定性实验研究
实验时,开启二级冷头上的加热器,用340控温仪将二级冷头的温度始终控制在5.6 K。同时打开压力控制器,将氦容器中的压力控制在1.55 MPa,使氦容器中的氦气始终处于超临界状态。二级冷头上的温度随时间的变化如图5所示。从图5所示的测量结果可知,冷头在5.6 K下的温度波动峰峰值为415 mK,此时冷头上温度的标准偏差为139.57 mK。如果样品与冷头直接连接进行冷却,会给样品带来较大的温度波动,因此研究减小样品上的温度波动是十分必要的。

图5 冷头温度随时间的变化Fig.5 Cold head temperature versus time
当冷头温度和氦气压力都处于稳定状态时,打开样品上的加热器,使样品上的温度分别稳定在7 K,18.7 K,20 K。若直接将样品与冷头连接,此时样品上的温度波动峰峰值将大于400 mK,接近于冷头的温度波动。此温度波动能满足一般的工业应用,但无法直接应用于对温度波动敏感的的实验研究,如卫星用的红外探测器等。本系统通过超临界氦和聚四氟乙烯热阻片相结合的方式,有效的抑制了样品上的温度波动。通过超临界氦和聚四氟乙烯热阻片的抑制作用后,样品在7 K、18.7 K、20 K下的温度波动曲线如图6—8所示。从图中所示结果可知,样品在7 K、18.7 K、20 K时, 温度波动的峰峰值分别为0.6 mK、0.6 mK、0.7 mK,计算得到的温度的标准偏差分别为0.079 mK、0.085 mK、0.093 mK。比较冷头和样品上的温度测量结果可知, 当冷头的温度波动峰峰值为415 mK时,通过超临界氦和2 mm厚聚四氟乙烯片热阻的抑制作用,能够使样品上温度波动的峰峰值小于0.8 mK。

图6 7 K时样品温度随时间的变化Fig.6 Sample teperature versus time when sample temperature stable at 7 K

图7 18.7 K时样品温度随时间的变化Fig.7 Sample teperature versus time when sample temperature stable at 18.7 K

图8 20 K时样品温度随时间的变化Fig.8 Sample teperature versus time when sample temperature stable at 20 K
4 制冷机停机后,样品温度稳定性实验研究
由于G-M型制冷机在工作的过程中会产生较大的机械振动,这将给对样品进行精确定位的实验造成非常大的困难。在很多实验过程中,精确定位的时间非常短,往往只需几分钟。因此在制冷机停机时,维持样品上的温度恒定,以解决精确定位的问题显得尤其重要。在本实验中采用的是超临界氦的方式来维持样品上的温度恒定,并且实时控制氦气的压力,使其始终保持在1.55 MPa。实验过程中,采用340控温仪,将二级冷头和样品的温度分别控制在5.6 K和18.7 K,当两者温度稳定时,关闭制冷机。制冷机停机后,二级冷头和样品的温度随时间的变化如图9所示。图中实线代表样品的温度随时间的变化,虚线表示冷头温度随时间的变化,样品温度的局部放大图如图9中的小图所示。从图中所示结果可知,当制冷机停机时,二级冷头的温度立刻开始上升。而样品上的温度在PID的控制下,始终稳定在18.7 K,此时样品的温度波动峰峰值始终小于1 mK,并且样品上温度的稳定时间超过了30 min。因此,通过本实验系统,可以短时间内解决制冷机的机械振动问题,并且在实验过程中能够保证样品的温度波动始终小于1 mK。

图9 制冷机停机后冷头和样品上的温度随时间的变化Fig.9 Temperature of cold head and sample versus time when cryocooler is dectivation
5 总 结
为了解决制冷机冷却样品的温度波动的问题,建立了一套以制冷机为冷源的低温温度测量系统,实验系统采用超临界氦和聚四氟乙烯热阻相结合的方式来抑制样品的温度波动。从实验结果可知,冷头温度稳定在5.6 K时,其温度波动峰峰值为415 mK。在此条件下,将样品的温度控制在7 K、18.7 K、20 K下,其温度波动峰峰值始终小于0.8 mK。此外,通过短时间内关闭制冷机的方式,本实验系统还可以有效解决制冷机的机械振动问题。实验结果表明,当冷头温度和样品温度分别稳定在5.6 K和18.7 K时,关闭制冷机后,样品上的温度能够在18.7 K稳定30 min,并且实验过程中样品上的温度波动峰峰值始终小于1 mK。从两次实验的结果可知,本实验系统能较好的解决样品上温度波动和机械振动的问题,这对于推动制冷机在超导磁体冷却和低温下物性测试等领域的应用具有十分重要的作用。
1 陈国邦.小型低温制冷机原理[M]. 北京:科学出版社, 2009.
Cheng Guobang. Small scale cryocooler principle[M]. Beijing: Science Press, 2009.
2 Yasuhiro Hasegawa, Daiki Nakamura, Masayuki, et al. High-precision temperature control and stabilization using a cryocooler[J]. Review of Scientific Instruments, 2010, 81:1-4.
3 Haid B J. Helium Pot System for Maintaining Sample Temperature after Cryocooler Deactivation[C]. AIP Conference Proceedings, 2006:147.
4 Chao Wang, John G Hartnett. A Vibration free cryostat using pulse tube cryocooler[J]. Cryogenics, 2010, 50:336-341.
5 傅伟纯,龚领会,张 靖,等.减小冷头温度周期性波动的研究[C]. 第八届全国低温制冷机学术交流会,北京,1996:144-150.
Fu Chunwei, Gong Linghui, Zhang Jing, et al. Research on decreasing the temperature fluctuation of cold head[C]. The 8th National Conference on Cryocooler, Beijing, 1996: 144-150.
Experiment study for stabilizing sample temperature using a cryocooler
Li Kongrong1,2Zhou Gang1Liu Liqiang1Xiong Lianyou1Li Qing1
(1Technical Institute of Physics and Chemistry, Chinese Academy of Science, Beijing 100190,China)(2University of Chinese Academy of Science, Beijing 100049,China)
The temperature fluctuation caused by a G-M cryocooler without a high heat capacity bath or thermal resistance between the cold head and the sample are typically of the order of 400 mK between 5.6 K and 20 K. A high precision low temperature measurement system is designed to make the peak-to-peak temperature fluctuation of the sample is less than 1 mK. In this system, the peak-to-peak temperature fluctuations of 0.8mK could be achieved when the temperature were controlled at 7 K,18.7 K,20 K with supercritical helium and PTFE thermal resistance. In addition, we also solve the mechanical vibration problem of the sample in a short time through shutting of the cryocooler.
cryocooler; temperature fluctuation; supercritical helium; mechanical vibration
2016-04-06;
2016-06-07
李空荣,男,26岁,博士研究生。
TB651
A
1000-6516(2016)03-0007-04
