一种活动发射平台弯道行走主动差速自动控制方法
2016-06-01李道平吴齐才
李道平,刘 毅,吴齐才,邢 然,范 虹
(北京航天发射技术研究所,北京,100076)
一种活动发射平台弯道行走主动差速自动控制方法
李道平,刘 毅,吴齐才,邢 然,范 虹
(北京航天发射技术研究所,北京,100076)
为确保某运载型号活动发射平台在包含直线轨道与圆弧形轨道的复杂轨道上完成运载火箭的垂直转运任务,为其驱动控制系统设计了一种弯道行走主动差速自动控制的方法。该方法通过采集轮组上安装的绝对值编码器的信息,确定每一个轮组在轨道上的精确位置信息,给定变频器不同的输出频率,从而控制各轮组的主动差速实现活动发射平台在圆弧形轨道上的运行及直轨弯轨之间的变轨运行,实现了活动发射平台在复杂轨道的平稳行走,有效地提高了活动发射平台的性能。
活动发射平台;驱动控制系统;速度控制;差速控制
0 引 言
驱动控制系统是活动发射平台的重要组成部分,可以使运载火箭平稳、安全地在技术厂房与发射工位之间垂直转运。图1为某航天发射基地轨道布置。
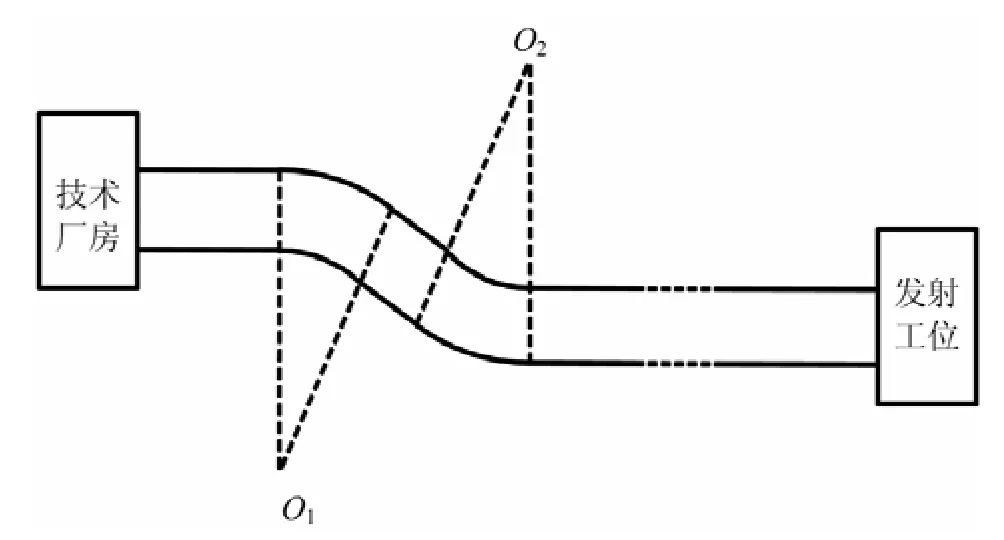
图1 某活动发射平台部分轨道布置
与以往运载型号活动发射平台相比,该运载型号活动发射平台需要在技术厂房与发射工位之间实现直线轨道、圆弧形弯曲轨道、弯轨直轨之间的变轨等多种形式的运行,并且在运行过程中不仅要在有限的时间内完成转运任务,还要保证活动发射平台上部运载火箭的稳定性和安全性。因此,该型号活动发射平台在圆弧形弯曲轨道上的速度控制方法是该系统运行的重要参数之一,也是该装置顺利完成行走任务的一个重大难点,对该速度控制方法展开研究具有重大理论意义和应用价值。
中国已有活动发射平台产品成熟产品,即 СZ-2F运载火箭活动发射平台。该活动发射平台能够完成箭体垂直转运过程的直线轨道运行及微动等功能,但是不具备弯道行走的能力。文献[1]对带有柔性机构的活动发射平台差速行走的可行性进行了分析,但是没有给出相关的差速控制方法;文献[2]、文献[3]对电动汽车单个轮组差速控制方法进行了分析,但是没有给出带有多个轮组的行走机构的差速控制方法;文献[4]~[6]对具有差速行走能力的多轮组起重机等工程机械设备的差速控制方法进行了研究,但是由于其使用工况不同,其速度控制方法并不能满足航天产品对精度、可靠性等性能指标的需求。
弯道行走速度控制方法是驱动控制系统的重要内容,其好坏对驱动控制系统的功能和性能有重要影响。为了满足该型号运载火箭垂直转运任务的需求,提出一种弯道行走主动差速自动控制方法。该方法通过采集轮组上安装的绝对值编码器的信息,确定每一个轮组在轨道上的精确位置信息,从而控制各轮组的主动差速实现活动发射平台在圆弧形轨道上的运行及直轨弯轨之间的变轨运行,实现了活动发射平台在复杂轨道的平稳行走,有效提高了活动发射平台的性能。
1 系统组成
活动发射平台驱动控制系统主要由上位机、控制面板、下位机、变频器、限位传感器和编码器等设备组成。以某型号活动发射平台驱动控制系统为例,上位机和控制面板将控制信号给定下位机,下位机利用Рrоfibus-DР总线控制变频器驱动16台电机的运行,系统通过限位传感器和绝对值编码器反馈电机的运行状态等信息,实现活动发射平台直线轨道行走、弯曲轨道行走、精确定位和运行状态监控等功能。系统原理如图2所示。
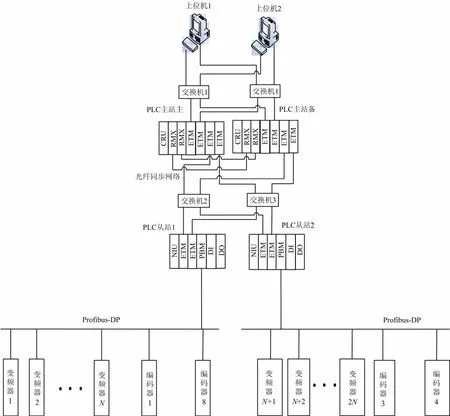
图2 某活动发射平台驱动控制系统原理框图
2 弯道运行速度控制方法
弯道行走速度控制方法利用台体两侧的4个绝对值编码器采集的脉冲值及每个轮组在活动发射平台上的位置计算活动发射平台每个轮组在轨道上的精确位置信息,从而确定是否采用差速控制实现活动发射平台的顺利转弯。整个活动发射平台运行时,在进入弯道的过程中,每一对轮组进入弯道即立刻采用差速控制,其他轮组速度仍为恒定;而在出弯道的过程中,每一对轮组出弯道时,即由差速改为同速运行。在由同速和差速变换的过程中,根据下位机软件的设置,速度控制始终保持处在同轴位置的两个轮组转弯角速度比一致,速度比为内外弯的半径比。
该方法的具体步骤如下:
а)步骤1:将行走装置两侧处于同轴位置的两个轮子看成一对轮组,则活动发射平台共有8对轮组。以行走装置的前沿为参考点计算每个轮组主动轮圆心距台体前沿的距离L,以图3中的第i个轮组为例,轮组i的主动轮圆心距台体前沿的距离为Li。
b)步骤2:计算某一转弯点距轨道原点的距离S。以图3第j个转弯点为例,该转弯点距轨道原点的距离为Sj;
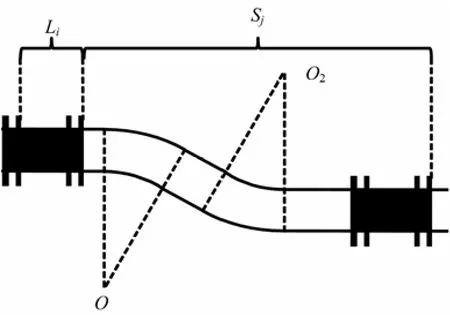
图3 某一轮组进弯位置示意
с)步骤3:当发射平台前沿与轨道原点处于同一位置启动时,计算活动发射平台的行走距离 P。设启动前绝对值编码器脉冲值为 p0,每旋转一周增加的脉冲值为Δp,当活动发射平台运行至某位置时采集到的绝对值编码器脉冲值为p,则根据轮组半径r,可计算出活动发射平台运行的行走距离P=2πr(p-p0)/Δp。
随活动发射平台的运行,P也随之增加,当P达到P=Li+Sj时,即可确定第i个轮组到达第j个转弯点,此时控制该轮组两部电机进行差速控制。
d)步骤 4:计算内弯 V1与外弯的速度 V2。设内弯与外弯的半径分别为R1与R2,台体中心的理想速度为V0,为保证内外弯速度比为差速比,则台体中心距轨道圆心距离Rm为


由式(2)计算内弯速度为

同理,外弯速度为


е)步骤5:通过将绝对值编码器采集的台体运动位移P与其他轮组距台体前沿的距离及转弯点距轨道原点的位移进行比较,可实现其他轮组在该转弯点的差速控制。
f)步骤 6:出弯道过程与进弯道过程相似,通过比较运动位移P与其他轮组距台体前沿的距离及出弯点距轨道原点的位移进行比较,可实现其他轮组在该转弯点由差速控制转为同速控制。
g)步骤7:台体反向运行时与之相似,仅绝对值编码器计算的位移值由最大值逐渐减小,其他不变。
算法流程如图4所示。
采用上述控制方法,可保证活动发射平台在进入弯道的过程中每一对轮组进入弯道时主动给定差速速度信号,而处于直线轨道的轮组仍然给定同速速度信号;在出弯道的过程中,每一对轮组行驶出弯道后给定速度信号由差速变为同速,而处于弯曲轨道内的轮组仍然给定差速速度信号。
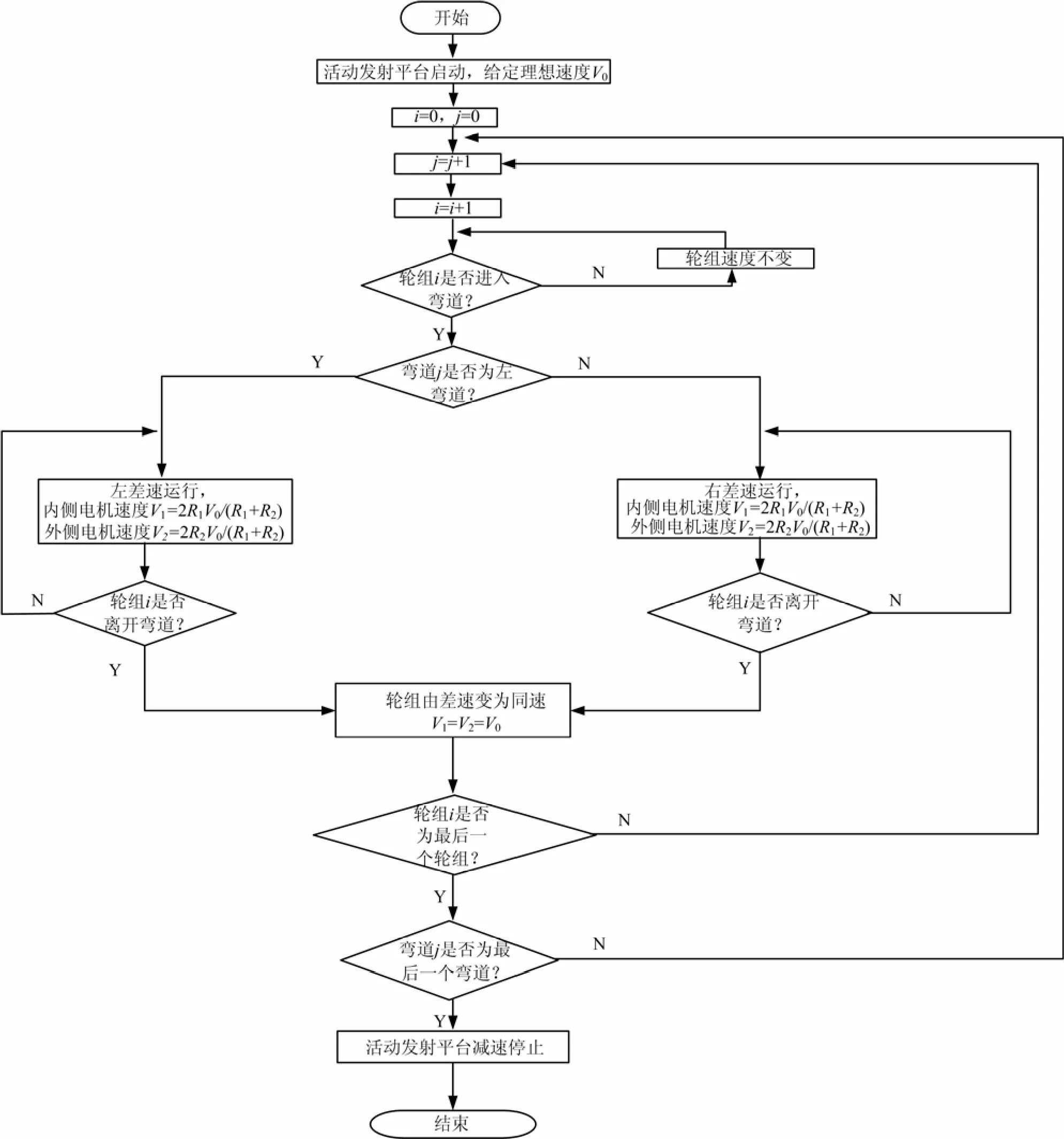
图4 活动发射平台弯道控制算法流程
3 试验结果与结论
为验证上述控制策略的有效性,某型号活动发射平台已顺利完成转弯原理试验,试验轨道如图5所示。
活动发射平台给定速度10 m/min运行,待速度运行稳定后进入弯曲轨道,全部进入弯道后停止,然后在弯道上反向启动,待速度稳定后出弯道,待轮组全部出弯道后减速停止。
图6为活动发射平台运行过程中16台电机的频率(速度)曲线,图7为活动发射平台运行过程中16台电机的电压曲线,图8为活动发射平台运行过程中16台电机的电流曲线。
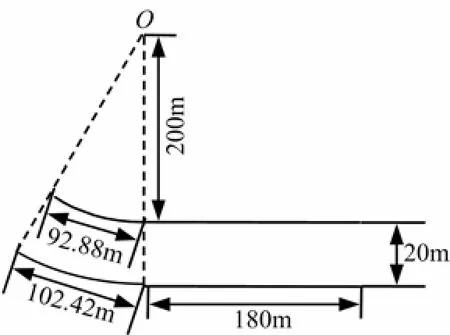
图5 某活动发射平台试验轨道示意
从图6中可以看出,活动发射平台位于直线轨道时,各电机速度基本相同,当轮组进入弯道后,虽然轮组依次给定为差速变化,但是由于受到机械结构的限制,所有电机转速呈一致差速变化,位于外轨的电机反馈频率较大,实际转速也较大,位于内轨的电机反馈频率也较小,实际转速也较小;反向运行相似,当活动发射平台行驶出弯道时,给定电机频率由差速变为同速,实际电机转速也趋向于一致。
从图7可以看出,在进出弯道的过程中16台电机电压平稳,无过电压和欠电压现象。
从图8可以看出,活动发射平台进弯之前,16台电机电流平稳,当活动发射平台在进弯的过程中,由于先进入弯道的电机采用差速控制,而处于弯道外的电机仍为同速。因此,由于机械结构的限制,电机电流略有增大,但是仍处于正常运行的安全值内,待全部电机进入弯道后,活动发射平台各轮组呈差速运行的稳定状态,电机电流也趋向于平稳。出弯道过程与进弯道过程相似,在出弯的过程中,由于先出弯的轮组给定同速运行,而位于弯道内的轮组给定为差速,同时受到机械结构的限制,各电机电流略有增大,但是仍处于正常运行的安全值内,当全部轮组行驶出弯道后,活动发射平台各轮组呈同速运行的稳定状态,电机电流也趋向于平稳。
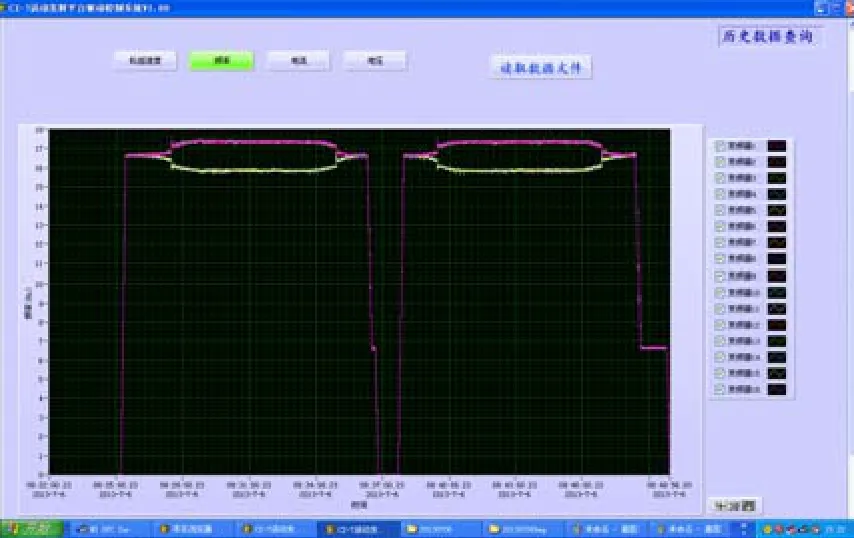
图6 活动发射平台行走过程的电机频率(速度)
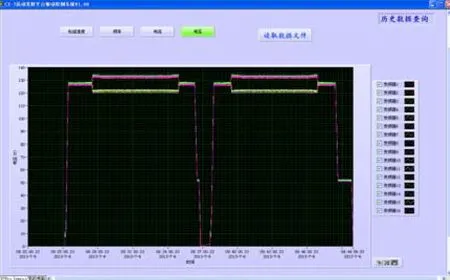
图7 活动发射平台行走过程的电机电压

图8 活动发射平台行走过程的电机电流
从图6~8中可以看出,整个运行的过程中,活动发射平台各电机性能良好,无过电压、欠电压、大负载冲击和相互拖动的现象。
试验证明,该速度控制方法可有效实现活动发射平台在弯曲轨道上的顺利行走。
4 结束语
为实现活动发射平台在带有直线轨道和圆弧型轨道的复杂轨道上的顺利行走,提出一种主动差速自动控制方法,该方法通过采集轮组上安装的绝对值编码器的信息,确定每一个轮组在轨道上的精确位置信息,从而给定电机不同的驱动频率,实现各轮组的主动差速运行。试验证明:该方法可有效实现活动发射平台在弯曲轨道上的顺利行走,为新型号运载火箭的垂直转运工作提供了有力保障。
[1] 黎定仕, 张锐, 范虹, 吴梦强, 何冠杰. 大型活动发射平台轨道曲线通过性分析[J]. 导弹与航天运载技术, 2014 (3): 29-32.
[2] 陈东, 徐寅, 梁华军. 双电机后轮驱动混合动力汽车电子差速控制的研究[J]. 汽车工程, 2013, 35 (1): 46-50.
[3] 蒋鸣雷, 张欣, 杨庆保. 纯电动汽车低速转向差速控制方法研究[J]. 北京汽车, 2014(2):20-23.
[4] 易定忠, 刘召安, 徐鹏. 梭车行走的差速控制方法[J]. 煤矿机电, 2014 (2): 62-64.
[5] 卞永明, 蒋佳, 杨礼斌. 基于弱磁控制的工程机械自适应电子差速控制[J]. 中国机械工程, 2014, (25): 1972-1977.
[6] 笪颖帆, 倪文波, 王雪梅, 邓贝贝. 电驱动铰接式自卸车电子差速控制策略及仿真[J]. 矿山机械, 2015, 43(4): 29-33.
An Active Automatic Speed Control Method in Different Speeds on Crooked Railway of Drive Control System of Mobile Launch Platform
Li Dао-рing, Liu Yi, Wu Qi-саi, Xing Rаn, Fаn Ноng
(Веijing Institutе оf Sрасе Lаunсh Тесhnоlоgу, Веijing, 100076)
In оrdеr tо соmрlеtе thе vеrtiсаl trаnsроrt missiоn оf rосkеt in соmрlех trасk, inсluding strаight аnd winding trасk, аn асtivе аutоmаtiс sрееd соntrоl mеthоd in diffеrеnt sрееds оn сrооkеd rаilwау оf drivе соntrоl sуstеm оf mоbilе lаunсh рlаtfоrm is dеsignеd. It соllесtеs thе рulsе оf аbsоlutе vаluе оf еnсоdеr оn whееls tо gеt thе роsitiоns оf еvеrу раir оf whееls аnd соntrоlls thе sрееd оf whееls, whiсh асhiеvеs thе mоvаblе lаunсh рlаtfоrm running оn соmрlех trасk smооthlу, imрrоvеs thе реrfоrmаnсе оf lаunсh рlаtfоrm еffесtivеlу.
Моbilе lаunсh рlаtfоrm; Drivе соntrоl sуstеm; Sрееd соntrоl; Sрееd соntrоl in diffеrеnсе
V553
А
1004-7182(2016)06-0027-05 DОI:10.7654/j.issn.1004-7182.20160607
2015-12-20;
2016-09-13
李道平(1983-),男,博士,高级工程师,主要研究方向为运动驱动与伺服控制
