海洋修井机滑移系统研究
2016-05-30江荣海
摘要:目前,固定式海洋平台的常规海洋修井机滑移系统主要有两种形式,即棘爪式和举升滚动式。文章介绍了常规海洋修井机滑移系统的组成、工作原理,从可靠性、经济性、结构复杂程度等方面分析了海洋修井机两种滑移方式的优缺点,为海洋修井机滑移系统的选择和设计提供了参考。
关键词:固定式海洋平台;海洋修井机;滑移系统;棘爪式;举升滚动式 文献标识码:A
中图分类号:TE935 文章编号:1009-2374(2016)14-0153-02 DOI:10.13535/j.cnki.11-4406/n.2016.14.077
1 概述
海洋平台是目前海洋石油勘探开发的主要装备,而在众多的海洋平台中,固定式海洋钻井平台是最常用的设备。大多数情况下,固定式海洋平台初期的钻井由自升式钻井平台来完成,当自升式钻井平台来钻井时,修井机可以滑移到避让位置,给自升式钻井平台留出足够的作业空间。固定式钻井平台的中、下层甲板都配置有配套的采油、储油等设施,当井区钻井完成之后,固定式平台就充当采油平台的角色进行采油作业。海洋修井机都是放置在固定平台的顶层甲板上,常规固定式平台顶层甲板由井口区(修井机作业区域)、飞行甲板区、修井辅助设备区(配电系统、固控系统、生活办公区域等)构成。固定式平台配置的海洋修井机主要用来进行钻完井、修井和打调整井作业,是保障平台采油效率的关键设备。修井机按吨位分为90t、112t(过渡产品,不推荐使用)、135t、158t(过渡产品,不推荐使用)、180t海洋修井机。按驱动方式分为柴油机机械驱动和电机驱动。修井机配置主要包括井架总成、移动底座、提升设备、绞车、转盘、游车大钩、水龙头、泥浆泵及泥浆罐系统、井口工具、防喷器及控制装置、泥浆管汇系统、电气系统。修井机放置在平台的井口区域,通过滑移系统实现修井机的横向和纵向的移动,从而保证修井机可以覆盖平台区域的所有井位。
2 海洋修井机滑移系统
固定式钻井平台配置的海洋修井机滑移系统一般都是通过液压传动原理来实现滑移的,通过液压动力及控制系统,将带压力的液压油介质传输到执行机构液压油缸中,将液压动力转换为油缸的推力或拉力,再通过连接耳板及销轴将力传到修井机的底座结构上,来克服修井机底座与滑移导轨之间的摩擦力,从而实现修井机底座的移动。滑移系统按修井机底座与导轨之间的摩擦方式来划分,主要有两种形式:棘爪式和举升滚动式。
2.1 棘爪式滑移系统
棘爪式滑移系统的棘爪机构有两种结构形式,插入式棘爪和摩擦式棘爪。插入式棘爪滑移系统和摩擦式棘爪滑移系统的工作原理是相同的,仅两个系统棘爪机构的结构不同,下面主要介绍一下这两种不同棘爪机构的滑移系统的组成、工作原理、控制原理、主要技术参数。
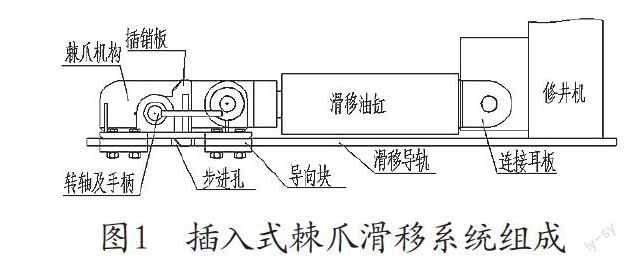
2.1.1 插入式棘爪滑移系统。插入式棘爪滑移系统主要由棘爪机构、插销板、转轴、导向块、滑移油缸、连接耳板及销轴组成,其结构如图1所示:
插入式棘爪滑移系统的导轨上翼板开有很多连续的步进孔,在滑移时,先转动转轴,将棘爪机构的插销板插入步进孔内,此时棘爪机构与导轨相对固定,通过控制滑移油缸的伸缩来完成修井机的移动。在移动一个油缸行程后,通过棘爪机构的转轴将插销板从步进孔中旋转出来,棘爪机构与导轨相对不固定,修井机相对导轨也不固定,但是棘爪机构的重量远远小于修井机的重量,所以修井机与导轨之间的摩擦力远远大于棘爪机构底座与导轨之间的摩擦力。此时控制滑移油缸的伸缩,可以完成棘爪机构在导轨上的移动,当滑移油缸完全伸出(或缩回)时,棘爪机构运动到下一个滑移行程的起始位置,如此循环操作,可以实现修井机的连续移动。
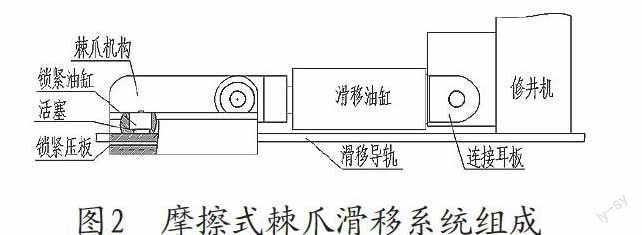
2.1.2 摩擦式棘爪滑移系统。摩擦式棘爪滑移系统主要由棘爪机构、锁紧油缸、锁紧压板、滑移油缸、连接耳板及销轴组成,其结构如图2所示:
摩擦式棘爪滑移系统与插入式棘爪滑移系统有相同的工作原理,仅棘爪机构的作用原理不同。锁紧油缸镶嵌于摩擦式棘爪机构中,与棘爪机构固定在一起。初始状态下,棘爪机构的锁紧压板与导轨有一定的间隙,当锁紧油缸的活塞杆动作时,油缸活塞杆的下端面和锁紧压板的上端面可以夹紧滑移导轨的上下平面,从而在棘爪机构与导轨之间产生一个很大的摩擦力(要大于修井机与导轨之间的摩擦力),从而保证在滑移油缸动作时,棘爪机构相对于导轨不动,而修井机相对于导轨移动。
2.1.3 控制原理。棘爪式滑移系统的液压动力源来自于修井机配置的组合液压站(电驱式修井机)或者来自于安装在液力变速箱上的取力器及液压油泵(机械驱动式修井机),整个液压控制系统由三位六通手动换向阀、单向阀、溢流阀、压力表、液压硬管线和液压软管等组成。通过控制手动换向阀,来实现滑移油缸的动作。其操作需要人为手动实现,控制精度低,修井机底座两侧滑移的同步性较差。
2.1.4 主要技术参数。棘爪式滑移系统的主要技术参数如下(180t常规海洋修井机的配置):
液压系统额定压力:16MPa
滑移油缸行程:600mm
设计摩擦系数:0.35
滑移油缸数量:4个(上、下移动座各2个)
滑移油缸拉力(上移动座):650kN
滑移油缸推力(上移动座):850kN
滑移油缸拉力(下移动座):1300kN
滑移油缸推力(下移动座):1750kN
2.2 举升滚动式滑移系统
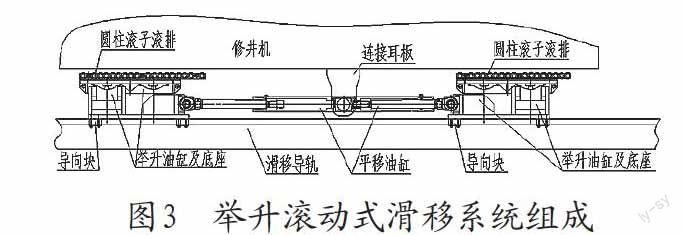
2.2.1 系统组成。举升滚动式滑移系统的结构较为复杂,它的工作原理是用滚动摩擦来代替棘爪式滑移系统的滑动摩擦,从而大大减小修井机滑移时需要克服的摩擦力,提高滑移系统的可靠性。举升滚动式滑移系统主要由举升油缸及底座、导向块、平移油缸、圆柱滚子滚排、连接耳板及销轴组成,其结构如图3所示:
修井机在滑移的初始状态时,举升油缸全部缩回,此时修井机的重量直接压在滑移导轨上,圆柱滚子滚排与修井机之间有间隙。开始滑移时先控制平移油缸先动作,全部平移油缸伸出(或缩回)到行程的最大(或最小)状态,然后控制举升油缸开始动作,举升油缸全部伸出,此时修井机被完全顶起,修井机的重量直接压在滑移系统的圆柱滚子滚排上,再控制平移油缸的动作,使其全部缩回(或伸出)。由于修井机相对于滚排的滑移是滚动摩擦,而举升油缸底座相对于滑移导轨的滑动是滑动摩擦,相同重量的情况下,滚动摩擦的摩擦力远远小于滑动摩擦,所以此时平移油缸动作过程中,举升油缸底座相对于滑移导轨不运动,修井机相对于滑移导轨会运动一个平移油缸的行程。平移油缸走完一个行程之后,举升油缸全部缩回,全部平移油缸伸出(或缩回)到行程的最大(或最小)状态,此时滑移系统又回到起始状态,进行相同的操作可以实现下一行程的滑移。如此反复操作,可以实现修井机往一个方向的连续移动。修井机的反方向的滑移原理与之相同,在此不再赘述。举升滚动式滑移系统的滑移导轨是一个特殊规格的焊接H型钢,其上翼板上不需要开孔,导轨的强度和滑移的安全性得到了很大的保障。
2.2.2 控制原理。举升滚动式滑移系统配置一套单独的液压站作为其动力源,整个液压控制系统由液压站、电控系统、三位四通电磁换向阀、单向阀、溢流阀、压力表、液压硬管线和液压软管等组成,液压站由两台电动柱塞泵提供动力,通过操作电控系统上的按钮来实现电磁换向阀的动作,同时电磁换向阀的动作可以实现举升油缸和平移油缸的动作。只需要人扳动电控系统的按钮,就可以实现油缸的动作,其控制精度高,滑移的同步性较好。
2.2.3 主要技术参数。举升滚动式滑移系统的主要技术参数如下(180t修井机的配置):
液压系统额定压力:24MPa
举升油缸行程:50mm
平移油缸行程:400mm
举升油缸数量:8个
平移油缸数量:4个
单个顶升油缸最大顶升力:1226kN
单个平移油缸最大推力:188kN
单个平移油缸最大拉力:96kN
3 结语
海洋修井机两种滑移系统的优缺点对比如表1:
文章介绍了固定式海洋钻井平台配套的海洋修井机滑移系统常见的两种形式:棘爪式和举升滚动式。棘爪式滑移系统是目前最常用的一种形式,其结构简单,成本较低,但在使用的过程中由于操作不当、导轨加工误差、修井机偏重、修井机底座受力之后的变形、滑移系统的同步性差等原因,很容易出现划伤或者啃噬导轨的情况。举升滚动式滑移系统的结构复杂,成本较高,但是举升滚动式滑移系统是滚动摩擦,能够很好地避免滑移底座划伤滑移导轨的情况,而且滑移导轨上翼板不用开步进孔,保障了滑移导轨的强度,提高了滑移的安全性。举升滚动式滑移系统的控制是通过电控系统和电磁换向阀来实现,所以其同步性也较好。通过本文的介绍,可以清楚地了解固定式海洋钻井平台海洋修井机滑移系统的组成、工作原理、主要技术参数等,同时也能够了解几种不同滑移系统的优缺点,在今后的设计中,可以根据不同的要求,为修井机设计出最优的滑移系统。
参考文献
[1] 欧阳隆绪,刘良跃.海上石油平台修井机(第1部分):形式与基本参数(Q/HS 2007.1-2002)[S].
作者简介:江荣海(1989-),男,陕西汉中人,中石化石油工程机械有限公司第四机械厂助理工程师,研究方向:海洋钻修设备。
(责任编辑:周 琼)