汽车稳定性辅助系统故障检修研究
2016-05-30姜维
姜维


摘 要:随着人民生活水平的不断提高,中小型汽车得到前所未有的普及机遇,关于汽车稳定性辅助系统故障开始引起全面关注,自然地对汽车维修技术人员提出极为严格的规范要求。在此类背景下,笔者决定联合特定车辆稳定辅助系统间歇性故障细节加以客观论证,尽量将内部工作原理、结构单元清晰描述,同步将最新技术理论和实践优势整理完全,真正将相关故障挖掘解析清楚,避免今后人们驾驶过程中遗留任何安全限制因素。
关键词:汽车稳定性;辅助系统;故障检测;调试措施
汽车内部传感器一切工作参数都是凭借电子控制单元进行传输存储和改造控制的,尤其是在单片机全程辅助作用下,汽车一切故障码都会被流畅读取。毕竟现阶段所有汽车生产商提供的通信协议都是保密的,针对此类媒介进行诊断系统优化改良,必将令过往我国被动学习西方先进技术的局面被深深打破,最终发挥出其应有的经济实用价值。
1 涉及汽车稳定性辅助系统内涵机理的客观论述
汽车稳定性辅助控制系统,拥有国际先进技术水准,旨在大幅度提升车辆行驶的稳定、安全性,除了传统制动防抱死和牵引力控制功能,更增加了防侧滑控制功能。其中,前者是在车辆制动,特别是在湿滑路面制动车辆抱死时,进行甩尾问题规避,令车辆转向能力维持在合理范畴内部,切实提升制动过程中的安全性;而牵引力控制系统,则是保证在车辆起步和加速期间自动消除车轮空转打滑隐患,保证车辆加速和安全性能,尤其是在冰雪天气中实用价值极为显著;至于防侧滑功能则可以深度克制发动机输出扭矩并制动车轮,令车辆顺势产生相反方向的偏转力矩,使得转向不足和过度问题深深地被扼杀在摇篮之中。
2 对于汽车稳定性辅助系统常见故障问题的整理研究
单纯拿横摆率和G传感器为例,它们集成分布于中央控制台下部位置,一旦说车辆加速期间,有关半导体加速传感器之中的可变电极就会同步移动,此时技术人员有必要主动利用和固定电极的空间距离变化结果,进行电极中的静电容量演算,同时灵活转换为所需的电子化控制信号。而G传感器又可顺势划分为两个类型,具体和车辆轴维持45度角度进行附加安装,保证在合理时间范围内精确化检验特定车辆水平方向一切减速率。相比之下,横摆率传感器,却是结合压电陶瓷部件的缠绕率数值与方向,进行车辆轴向当下旋转角度精确化提炼评估。关于该类传感器结构样式则主要如下图所示:
如若车辆经过较强的碰撞,内部传感器电子部件的隐性损坏概率就会同步上涨,即便是在特殊情况下,技术人员也不能精确化检测其横摆率,使得防滑控制系统提供错误的判断信息,制动执行装置回应发生冲突迹象,自然就故障百出了。不过该类传感装置会针对各类错误进行快速处理,因此自检系统不能及时地将其划分到故障代码储存行列之中,而点火开关关闭过后记录就会被全面清除。因为以上故障问题饱含一定程度的间歇性,即便是修理人员顺势开展多次路试,故障重复衍生率也不高,所以修理厂一时之间不能挖掘故障根源,唯独在发生故障环节中加以快速读取,才可以真正地将尚未被清除的存储记录完整地读取出来。
3 有关上述故障问题科学化检修策略的验证解析
3.1 硬件设施更新方面
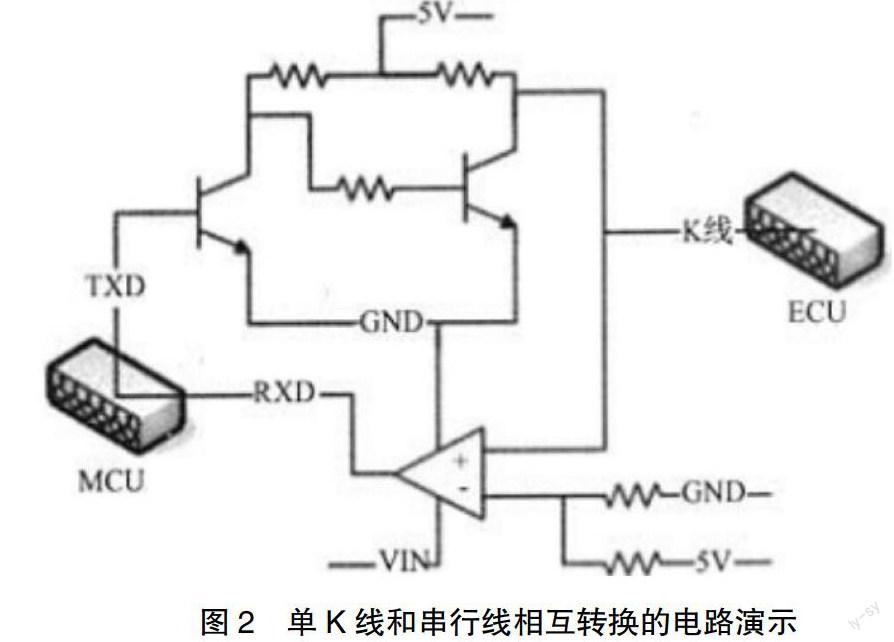
针对辅助系统加以全面检测,第一要务便是观察电路单片机串行口状况,配合K、L线通道和防滑控制系统完成数据通信收发任务,其中K线属于通讯半双工线,L线则是激发线,大多数情况下单纯依靠前者就可顺利处理一切通信事务。但是该类线路作为双向收发通道,工作环节中电平差异迹象显著,尤其是在和单片机串口通信前期,必须加以适当地转换,关于稳定性辅助系统串口和K线的实际转换电路主要如图2所示:
正如图2所示,单片机具体型号为89C51,关于外部U/O口则比较多元化,至于串行过程中的信息传输效率,也不会和预设传输协议规则产生严重的冲突迹象。毕竟此类协议通信波特率包含600、4800、10400pbs等多种类型,因此检修过程中技术人员最好应用12M的晶振。因为汽车防滑控制系统工作环节中的电平稳定在12V,并且会透过OBDII接口向检测卡提供所需电力能源,因此有必要提前进行电平转换电路和单片机捆绑衔接,之后结合78LS05将实际电压转换为5V,保证单片机一切电力需求得以满足。而故障码显示方面,则借助四段数码管予以调试,相信必然会为该类系统故障检测事务节约合理数量的成本资金。
3.2 软件开发应用方面
进行汽车稳定性辅助系统故障进行全方位检修,尤其是当中的信息数据处理工作,本身属于一类过于复杂的工序流程,一旦说技术人员介入此类系统过后,防滑控制系统就会快速获取由单片机以5bps发送的地址码,检测卡在精确化演算地址码波特率过后,会直接将最终结果作为检测卡的通讯波特率,确保在整个通讯环节中波特率的稳定性结果。整个通讯环节主要凭借1位启始位+8位数据位+1个停止位的形式,使得关键性数据信息透过小头方式快速传递交接。
需要加以强调的是,防滑控制系统和单片机的握手、通信结构单元衔接关系能否处理妥当,将直接决定汽车稳定性辅助系统故障检修成果。当中,单片机利用对应响应数据包Request命令加以回应,保证防滑控制系统在第一时间内提供不同类型的故障信息数据包。持续到接收工作处理完毕过后,关于Request命令请求数据会自动持续发送,一直到一切汽车故障码接收成功之后,人为地将命令字符Req Word设置为06H,至此通信工作顺利结束,所有故障码数据会通过数码管传输并进行动态显示。然而将Request命令内部的Req Word设定为09H时,就是说主动要求进行零件和系统信息号码接收,汽车稳定性辅助系统在发送特定信息内容过后,会自动地将Ans Word命令字设置为00H的Answer命令,证明该类信息发送程序顺利完成。将命令字符Request设置为07H时,则是代表请求进行故障码读取,关于其简化过的控制细节主要如图3所示:
操作流程演示
如OBDII本身应用的故障表述代码格式要求十分严格,主要利用五位数字组织形成,分别表示系统、生产厂家、辅助系统故障范畴、故障内容等内容,全程会透过数码管予以流畅化显示。因为握手阶段中波特率不高,因此无法单纯地凭借单片机定时器方式加以协调控制,需要在前期中断定时器,待数据流出时再进行同步赋值。再就是根据TXD工作需求进行合理调试,顺势贯彻5bps握手信号的发送要求。此时,单片机自然利用检测过程中接收到的地址码55H进行起始位认证,使得任何一位数据发送消耗的具体时间得以清晰记录,进一步精准化提取此时数据通信的波特率。因为55H的最低位仍旧属于高电位,所以技术人员可考虑进行起始位低电平时间直接检测。
4 结语
综上所述,笔者在进行汽车稳定性辅助系统故障科学检修方案制定过程中,更加充分地发挥了OBDDI通用接口的优点,使得现场技术人员在维持硬件设施原有布局规则状况之下,利用OBDDI其余通信协议内容兼容的特性,进行命令内容及时性修改,保证其余类型汽车的稳定性辅助系统故障检测工作,也可凭借该类原理顺利操作运行。相信长此以往,必将能够为我国汽车综合性能条件稳固和驾驶安全性提升,创设不可计数的支撑辅助贡献。
参考文献:
[1]范小彬.汽车稳定性集成控制研究现状及发展[J].汽车与配件,2010,33(27):145-167.
[2]李红志.汽车稳定性控制系统性能试验与数据处理方法[J].农业机械学报,2011,18(05):113-119.
[3]郗建国.汽车稳定性横摆力矩控制仿真研究[J].工业设计,2011,31(09):98-106.
[4]韩玉敏.基于模糊切换增益调节的汽车稳定性滑模控制[J].交通科技与经济,2012,20(06):108-116.
[5]郭健.汽车稳定性多控制工况设计及其切换机制研究[J].机械工程学报,2014,32(04):173-188.