工程领域中三维导航应用技术要点剖析
2016-05-25陈炎钊
陈炎钊
(浙江省第一测绘院,杭州 310012)
智能与信息化
工程领域中三维导航应用技术要点剖析
陈炎钊
(浙江省第一测绘院,杭州 310012)
三维导航与二维平面导航在技术上近似,但侧重点不同,应用上也有不同。二维平面导航目前常应用于地面导航。三维导航尤其是全球性的三维导航,则必须考虑全球坐标系统的统一性,与高斯平面上的数字处理相比,技术上难度较大。选择一个时空统一的合理坐标系统,作为全球导航参考基准,是重要内容之一。论文较为系统地分析了各个工序节点的技术要领,并提出一些新的可行性技术,将一种新型结构模式的数据+定位的三维连续导航系统的轮廓展现给大家。
三维定位;三维坐标系统;G PS导航
【DOI】10.13616/j.cnki.gcjsysj.2016.09.036
1 引言
三维导航与地面车载导航有所不同,技术上有相同之处也有各自的侧重点。地面导航目前接触到的多数是二维平面导航;而三维导航则要确定空间的实时位置,因而技术上又多了一层,难度也增加。尤其是全球性的三维导航,则必须考虑全球坐标系统的统一性,与高斯平面上的数据处理,不能相提评论。选择一个时空统一的合理坐标系统,作为全球导航参考基准,是重要内容之一。同时,在地球表面进行全球导航,比如在海上,很多区域没有岛屿等地物可以参照,导航必须给出全球的三维地图才能有效表述,并将地图分级放大,协同运行。
三维导航的核心技术是三维定位于GIS数据的协同工作。其应用非常广泛。然而,其原理与在工程领域中利用卫星定位技术进行放样是基本一致的,求得大地坐标,再进行转换,然后使用坐标值定位。看似简单,但各工序具有一定的复杂性与技术难度。
2 全球三维导航概述
2.1 导航技术历史回顾
地图最早也是由做向导开始的,军队的行军作战离不开地图,可以说导航起源就是地图。后来由地图派生出专门的导航系统,到如今虽然发展了许多代,但大多数没离开过地图。
专业的导航系统已经有近百年的历史了。1921年,美国明尼苏达州JohnJ.Bovy申请了一项手持导航工具专利——可滚动地图。它可以安装在汽车上,为行驶的汽车导航。到了1960年,美国成功发射了全球首颗轨道导航卫星系统Transit1B。之后基于原子钟测距的定位系统不断发射实验,到了1977年基本奠定了NAVSTARGPS系统框架。提供了稳定的三维定位系统[1]。
2.2 现代导航技术
卫星定位系统术语缩写用GNSS缩写表示,泛指包括美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统等。为方便起见在此以GPS为例[2]。
全球定位系统(GPS)能为全球任意地点、任意多个用户同时提供高精度、全天候、连续实时的三维定位、三维测速和时间基准。由于这一系统在定位、导航、测速、授时等方面具有高效率、高精度、多功能等特点,因而,原有较为复杂费时的天文测量导航基本被人们遗忘。但随着数字摄像仪与计算机技术的发展,这项定位技术变得更加方便,尤其是具有永久的低(无)成本的参照系统,且只要有格林尼治授时台授时,就可满足导航定位之需。
卫星导航、惯性导航以及其他技术相互组合,促进了导航技术的进一步发展。
3 全球三维导航参照系统
3.1 基本概念
既然是全球导航,就需要有全球性的连续电子地图。然而,由于从椭球体到平面的投影,在拓扑结构上不可能不产生奇点,所以地图的平面投影通常不能给出一个连续的全球覆盖。因而,高斯投影、墨卡托投影等提供的投影图,是一种碎块集合体,此为基础的导航系统必定限于范围面积或只能跳跃式提供地图服务,而不可能提供连续的服务,除非有新型的三维系统。
3.2 参照系分类
3.2.1 国家2000大地坐标系
由国家2000大地坐标系由国务院批准,2008年7月1日起正式实施。坐标系原点为包括海洋和大气的整个地球的质量中心,Z轴由原点指向历元2000.0的地球参考极的方向,X轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点,Y轴与Z轴、X轴构成右手正交坐标系。
采用的地球椭球的参数为:长半轴a=6 378 137m,扁率f=1/298.257 222 101。
3.2.2 WGS-84坐标系
原点为包括海洋和大气的整个地球的质量中心,Z轴由原点指向历元1984.0的地球参考极的方向,X轴由原点指向格林尼治参考子午线与地球赤道面(历元1974.0)的交点,Y轴与Z轴、X轴构成右手正交坐标系。
WGS-84椭球[3]采用国际大地测量与地球物理联合会第17届大会测量常数推荐值,2个常用基本几何参数为:长半径a=(6378 137±2)m;扁率f=0.003 352 810 664。
3.3 坐标值的表达方式
三维系统通常分为2类:一类是真三维坐标系统,用(x、y,z)表示空间中的某点,如国家2000大地坐标系、WGS-84等;另一类是投影成平面地图+大地水准面高程,也可以用经纬度+到椭球面的高度来表示,即用(B,L,H)来表示椭球表面的一个点。
4 卫星定位技术及相应对策
4.1 当前的卫星定位系统
迄今,比较完善的卫星导航系统有美国GPS、俄罗斯Glonass系统和欧洲卫星导航系统Galileo,以及我国正在建设的北斗导航系统。
利用GPS进行气象预报,遥感地球大气,测定大气温度及水汽含量,监测气候变化等,由于现势性较强,无须进行转换,实测结果可认为是CGCS2000下的结果。GPS用于陆海空定位导航,进行海上船位和平台的高精度定位,海洋测绘任务、飞机导航,要求精度一般在厘米级甚至米级,因此无须顾及框架间的差异。WGS-84下的结果可视作CGCS2000下的结果。建立WGS-84世界大地坐标系的一个重要目的,是在世界上建立一个统一的地心坐标系。地质、土地利用调查、精细农业和精细林业以及旅游考古、海事部门都可直接利用WGS-84下的结果。
4.2 卫星定位技术应用分类
导航技术的迅速发展,已由较为单一的交通定位导航,扩展到测绘、土地调查、建筑工程、旅游指南、公安PLGIS、通信、物探、气象等领域,渗透到国民经济的多个方面。卫星导航系统应用日益广泛,为人类带来了巨大的社会和经济效益。
4.3 卫星定位技术对三维导航的主导作用
卫星定位技术的发展,使精准定位的三维导航也变得可行。一般情况下,只有在静态才能求得精确值,但随着应用的持久与广泛,通过在已知坐标值的点位上设站,可以回归求出卫星信号在传播过程中的各种系统误差改正数,并与原来理论研究的数学改正模型相印证,继而高精度实时定位导航得以逐步实现。
5 卫星定位信号接收与处理
5.1 信号接收[4]
信号通道是接收机的核心部分。GPS信号通道是硬软件结合的电路。不同类型的接收机其通道也有所不同的。
GPS信号通道的作用为:搜索卫星,索引并跟踪卫星;对广播电文数据信号进行解扩、解调出广播电文;进行伪距测量、载波相位测量及多普勒频移测量。
卫星所接收到的信号是扩频的调制信号,所以要经过解扩、解调才能得到导航电文。为了达到此目的,在相关通道电路中设有伪码相位跟踪环和载波相位跟踪环。
5.2 误差改正
卫星定位原理是基于时钟系统的电磁波测距后方交会。信号通过空中到地面,受到各种干扰影响,因而误差改正组成较为复杂。这方面研究的文章较多,卓有成效。
在已知点上设站,反求改正参数,再用于未知点的定位改正。这是实用的有效方法。目前的Cors系统定位准确效率高。
5.3 信号处理[5]
微处理器是GPS接收机工作的重要部分,GPS接收机都是在微处理器指令下协同工作的。其主要步骤如下。
1)接收机开机后,首先进行自检,称为预热。
2)随后接收机对卫星进行搜索,当搜索到卫星信号时,即进行跟踪,并将接收到的信号译码为GPS卫星星历。当收索到4颗卫星信号时,将C/A码伪距观测值及星历一起计算测站的三维坐标,并按预置位置更新率计算新的位置。
3)根据机内存贮的卫星历书和测站近似位置,计算所有在轨卫星升降时间、方位和高度角。
4)GPS接收机给出导航电文,其数据结构格式 (电文片段)如下:
$GPGGA,091047.00,3959.7618,N,11619.5350,E,1,07,2.3, 60.0,M,-6.5,M,,*4A,,,,,,
$GPZDA,091048.00,14,01,2005,,*61
每一行的语义如下:所有行均以$符开始,以换行符结束,在符号$后的5个字符解释了信息的基本类型,多重信息之间用逗号隔开:,使用回车控制符和换行控制符。
5.4 软件处理导航电文
在导航软件中,必须有接收处理导航电文的功能。软件可以建一个mydh.DLL作为其中的一个组合件。mydh.DLL控件的内容至少有以下内容:
1)须有一个过程msmentsub'命名随意…endsub,添加通讯控件,与接收器连接;
2)用RS232线路与接收器双向通讯;
3)分拣导航电文中的坐标时间信息;
4)在硬盘中记录坐标作为路径信息;
5)换算经纬度坐标,与导航使用的GIS数据坐标系统取得一致;
6)在电子图上定位显示当前位置;
7)提示周边相关信息;
8)可以预报未来时刻的准确方位及点位;
9)其他处理功能;
10)关闭通讯退出模块的功能。
5.5 室内导航测试
我们用笔记本联机接收天线,导航软件开机预热1min后,在室内自动显示定位点,发现在室内只要有无线信号可以接收,即可解码信号进行定位,但精度受到一定影响。同一位置在不同时间显示的坐标是不同的,在一误差半径为R的圆内显示散列点阵。由于室内景深不等,R的大小也在变化,R在10m级,室内定位误差半径(见图1)。这是一个初步测试,有待于更多的研究。
5.6 空中导航模拟测试
在野外测试时,记录有路径数据文件。以这个文件为基础,模拟1个全球路径数据文件,用导航软件回放,可以看到,飞行器飞行轨迹,还可以测试速度、方位、高度等参数。
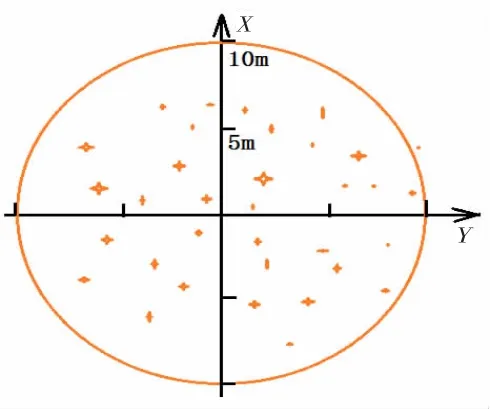
图1 室内定位误差半径
6 坐标处理
6.1 定位点坐标解码数据
在某一时刻接收到的卫星星历文件经过解码,得到经纬度值与大地高。而导航软件中的GIS数据一般可以用“经纬度坐标+高程”的形式保存到文件,但无法在屏幕上按一定比例显示,因为1纬度与1经度其长度是不同的。同样是1纬度,其长度值也在随纬度大小而变化。因此必须转换成能按比例显示的坐标,那就是直角坐标系统。
前述,经典的投影为高斯平面,而从WGS-84坐标建立以来,有了以地球质心为原点的三维直角坐标系统。我们应将导航电文中解算出的坐标位置值(B,L,H),转换成直角坐标系坐标。
6.2 坐标转换与G IS一致
在工程建设领域,如桥梁、道路、水利枢纽等,建立的坐标是高斯平面系统,一般用普通几何方法计算坐标值;而卫星定位值是地球椭球上的大地坐标经纬度。因此,工程建设的控制网及施工放样若用卫星定位技术,必须经过多道转换计算工序。目前,许多先进的总图设计也也在GIS系统上进行。导航的原理也是定位引导,这是一致的。
从应用的角度出发,国家2000坐标系与WGS-84坐标系相差甚微,其误差对基准来说是要考虑的,但对导航等工程来说则可以忽略。本文以WGS-84系统为例加以介绍。
一般坐标转换流程为:P(B,L,H)→投影到分带的高斯-克吕格投影平面上,经过平移旋转与导航软件的数据坐标取得一致。而海上导航用的海图,其投影是墨卡托投影,是与高斯-克吕格投影不同的投影方式,但其过程基本相同,结果也在一个直角平面上[6]。
H是大地高,在三维导航中也应与导航软件数据的高程系统取得一致。现在由于数据的积累,应该可以初步建立起全球大地水准面模型了。局部区域可以精确建立这个模型。借助于该模型,通过内插计算,可以方便地将大地高转为水准面的高程。
与局部区域的导航不同,全球性的导航在平面上并不方便,平面图有分带,需要进行拼接。这在远洋航行、远距离国际航班等情况下,必然会出现。
6.3 全球三维G IS系统构建设计[7-10]
由于计算机技术日益成熟,建立一个三维坐标GIS系统已经是可行的。以WGS-84大地坐标系为基准的三维全球GIS系统,将很方便践行各种计算,无需如椭球球面上那样计算复杂耗时。所需数据也可以将原有的高斯平面上的数据逆向转换成三维空间坐标数据。
同时,由于全球大地水准面模型的建立,水准高程与大地高之间的互相转换变得方便可行。这样,GPS高程也可以直接应用到一些工程项目中。
在这个三维系统上,计算也将更方便。2点之间的直线与地心构成的面在地球表面的截线段就是大地线,因此方位角、大地线长度等椭球面上的计算仍可协调统一。
在短距离工程领域内,直线距离可以直接代替大地线,其误差可以忽略,如10km以内(宜以精度要求为前提确定距离长短)。这将相当于一个全球一体化的微分平面集合体。
这个微分平面,可大可小。微分平面坐标系与三维坐标系的转换模型容易建立。
6.4 与全球G IS数据的结合
在现有GIS数据体系下,实现全球导航,一般以数据组合的方式出现。将电子地图数据分成若干区域,以坐标为索引,调用所在区域的数据。
有的GIS软件,总图是以经纬度为单位将全图展开在1个平面上,除赤道外,其他地方长度都是变形的,尤其南北极,1个点变成了1条线。但仍然可以起到示意作用。
还有一种情况,如用航天飞机雷达将全球扫描并经过数据加工形成不同分辨率的全球DEM图像并作为导航底图,其数据的高程精度在数10m之内。如对个别区域用精度较高的DEM数据补充后,可以满足诸如航空导航等一些领域的需求。
7 结语
三维导航也是由应用需求催生的,不少高端行业需要这项技术提供服务。如远洋货轮通过全球三维导航,可以了解记录精确的航行轨迹,不断改进航行服务等。
通过分析这项技术服务,模式能不断改进。不限于车载导航,诸如远洋导航一类,不一定需要对路线周边详细的地理人文信息,仅需一个较为精准的航行线路,船只即可沿着这一轨迹航行到达目的地[11]。不同的是需要有跨带的长距离的连续地形图。因此,GIS系统模式不尽相同,有其自身的特点。
为建立新一代三维导航系统,我们应从高斯-克吕格分带投影、墨卡托投影海图的固定模式中走出来,借助于强大的计算机技术,建立起新型导航系统,提供更加科学、便捷、精准的技术服务。
【1】熊志昂,李红瑞,赖顺香.GPS技术与工程应用[M].北京:国防工业出版社,2007.
【2】杨力.GNSS的现状及发展[EB/OL].(2011.03.12)[2015-10-01].http: //wenku.baidu.com/link?url=p4R7dJB5baH6yM5ckRXF5601pGnF fafa CeaABFb0SVeyv-gx51aojpWbfuE8jJffDuB80fCjbzmlv-tVZ-6 Ka6znx TJKXb9t0kpty1KB1S.
【3】钟丹星,邓新蒲.基于WGS-84椭球模型的卫星测时差定位精度分析[J].电子信息对抗技术,2002,17(5):18-21.
【4】秦红雷.GPS信号格式和导航电文[EB/OL].(2012.11.25)[2015-10.1].http://www.docin.con/P-537178727.html.
【5】GPS导航电文概述[EB/OL].(2012.05.09)[2015.10.1].http://blog. sina.com.cn/s/blog_5633268601014cjr.html.
【6】胡圣武.地图学[M].北京:清华大学出版社,2008.
【7】EVANGELOSPT.Visualbasic2005从入门到精通[M].王军,译.北京:电子工业出版社,2007.
【8】FRANCESCOB.Visualbasic2005技术内幕[M].贾洪峰,译.北京:清华大学出版社,2006.
【9】周长发.科学与工程数值算法[M].北京:清华大学出版社,2002.
【10】贾超广,肖海霞.基于卫星信号模拟器的北斗接收机性能测试与分析[J].导航定位学报,2013,1(4):14-16.
【11】辛洁,赵伟,张之学,等.卫星导航系统发展及其军事应用特点分析[J].导航定位学报,2015,3(4):38-43.
AnalysisTechnical Points of Three-dimensionalNavigationApplication in Engineering Field
CHENYan-zhao
(TheFirstSurveyingandMappingInstituteofZhejiangProvince,Hangzhou 310012,China)
Three dimensional navigation and two-dimensional plane navigation in the technical approximation, but the focus is different,there are different applications. Two dimensional plane navigation is the common application of the ground navigation. Three dimensionalnavigation, especially the global three-dimensional navigation, youmust consider the unity of the global coordinate system, comparedwiththedigital processingon theGaussplan, themore difficult to increase the technical.Choosinga proper coordinate systemofspace and time isone of the important contents of the global navigation reference standard. This paper systematically analyzes the technicalmethods of eachworking procedure node, and puts forward some new feasible technologies. The outline of a new type of structural model of the data +locationofthe3Dcontinuousnavigationsystemisshowntoeveryone.
three-dimensionalpositioning;three-dimensionalcoordinatesystem;GPSnavigation
P258
B
10079-9467(2016)09-0129-04
2016-07-04
陈炎钊(1963~),男,浙江诸暨人,高级工程师,从事工程测绘与研究,(电子信箱)hz_cyz@126.com。
